Курсовая по электроприводу. Электропривод подъема мостового крана
 Скачать 2.12 Mb. Скачать 2.12 Mb.
|

|
чМИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ <<Магнитогорский государственный технический университет им.Г.И.Носова филиал в г.Белорецк>> (ФГБОУ ВО<<МГТУ>>) Кафедра Металлургии и стандартизации КУРСОВОЙ ПРОЕКТ РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА По дисциплине :Теория электропривода на тему: «Электропривод подъема мостового крана» Исполнитель: Руководитель: Работа допущена к защите<<_____>>__________20_____г.___________ (подпись) Работа защищена<<_____>>___________20____г.с оценкой__________ __________ (оценка) (подпись) СОДЕРЖАНИЕВВЕДЕНИЕ 3 1 ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ 4 1.1 Выбор и описание грузоподъёмной машины 4 1.2 Анализ кинематической схемы, определение параметров и проектирование расчётной схемы механической части электропривода 4 1.3 Формулирование требований к автоматизированному электроприводу и системе автоматизации 6 2. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ 8 2.1 Расчёт нагрузок и построение механической характеристики и нагрузочной диаграммы механизма 8 2.2 Предварительный выбор электродвигателя по мощности 10 2.3 Выбор номинальной скорости двигателя и типоразмера двигателя 11 2.4 Построение нагрузочной диаграммы электропривода 12 2.5 Проверка двигателя по нагреву и перегрузочной способности 15 3 ПРОЕКТИРОВАНИЕ СИЛОВОЙ СХЕМЫ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА И ВЫБОР КОМПЛЕКТНОГО ПРЕОБРАЗОВАТЕЛЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ 17 3.1 Определение возможных вариантов и обоснование выбора типа комплектного преобразователя 17 3.2 выбор элементов силовой цепи 18 3.3 Выбор датчиков регулируемых координат электропривода 21 4 ОПРЕДЕЛЕНИЕ СТРУКТУРЫ И ПАРАМЕТРОВ УПРАВЛЯЮЩЕГО УСТРОЙСТВА 22 5 РАСЧЕТ ДИНАМИЧЕСКИХ И СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА 24 5.1 РАСЧЕТ статических характеристик электропривода 24 5.2 Построение механической характеристики при динамическом торможении 28 6. Расчет статических и динамических характеристик разомкнутой системы. 29 ЗАКЛЮЧЕНИЕ 31 2 ВВЕДЕНИЕПодъемно-транспортные машины (ПТМ) являются одними из основных средств механизации всех отраслей промышленности, в том числе в машиностроении. Эффективным путем повышения производительности является механизация вспомогательных операций - погрузочных и транспортных работ. С этой целью применяют машины для подъема и транспортирования изделий, загрузки обрабатывающего оборудования. Подъемно-транспортные машины являются неотъемлемой частью современного промышленного и сельскохозяйственного производства. Производительность, экономичность, техническое совершенство и уровень автоматизации ПТМ зачастую определяют эффективность предприятия в целом. ПТМ служит для перемещения грузов по вертикальной, горизонтальной либо наклонной траектории в цехах, на рабочих местах, складах, строительстве, в портах и т. д. Объектом перемещения могут быть грузы штучные (ящики, детали машины), сыпучие (руда, уголь, песок). Важнейшим направлением в развитии механизации переработки грузов является комплексная механизация и автоматизация, при которой все операции по погрузке и разгрузке грузов и готовых изделий, операции по транспортированию на протяжении всего технологического процесса, складские операции производятся с помощью машин и механизмов без существенных затрат человеческого труда. В нашей стране создано много новых оригинальных и экономичных конструкций подъемно-транспортных машин; совершенствовались технические характеристики машин, получили развитие некоторые новые направления в комплексной механизации переработки грузов, расширились границы применения машин 3 1 ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ1.1 Выбор и описание грузоподъёмной машиныГрузоподъемные машины циклического действия с возвратно-поступательным движением грузозахватного органа; служит для подъёма и перемещение грузов. Цикл работы грузоподъемного крана состоит из захвата груза, рабочего хода для перемещения груза и разгрузки, холостого хода для возврата порожнего грузозахватного устройства к месту приёма груза. Движения грузоподъемного крана могут быть как рабочими, так и установочными для периодического изменения положения крана. Основная характеристика грузоподъемного крана - грузоподъемность, под которой понимают наибольшую массу поднимаемого груза, причём в случае сменных грузозахватных устройств их масса включается в общую грузоподъёмность Основные части мостового крана показаны на рисунке №1.1. 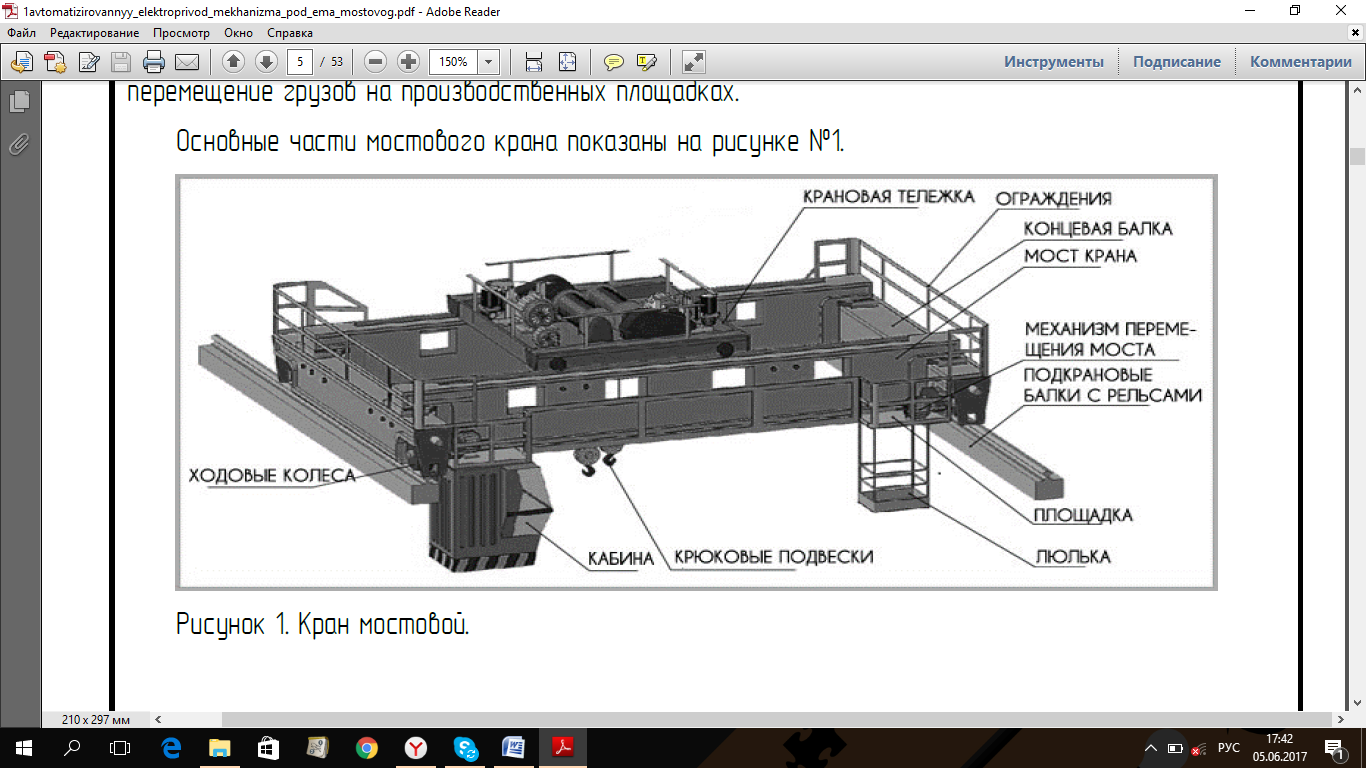 Рисунок 1.1 - Кран мостовой. |