Микропроцессоры. Федеральное агентство морского и речного транспорта омский институт водного транспорта филиал федерального государственного бюджетного образовательного учреждения высшего обр
 Скачать 225.26 Kb. Скачать 225.26 Kb.
|

К  афедра Электротехники и электрооборудования афедра Электротехники и электрооборудования___________________ Оценка ___________________________ Подпись ___________________________ Дата Курсовая работа По дисциплине: Микропроцессорные системы управления ______________электроприводами На тему: Автоматизация промышленного робота РУКОВОДИТЕЛЬ: к.т.н профессор _______ (ученая степень, должность) А.А Руппель_________ (Ф.И.О.) СТУДЕНТ: Очная гр. ЭЭ-31 _______ (форма обучения, гр., шифр) Романчук Сергей Евгеньвич______ (Ф.И.О.) ________________________ (Рег. №) ________________________ (дата) ________________________ (подпись лаборанта) Омск 2020 г. Содержание Введение_______________________________________________________ 2 1. Описание принципиальной схемы управления приводом робота________ 4 2. Составление алгоритма управления роботом_________________________ 6 3. Составление принципиальной электрической схемы цифровой системы управления приводом робота________________________________________ 7 4. Заключение_____________________________________________________ 8 Введение. Автоматизация производства - процесс в развитии машинного производства, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам. Автоматизация производства - основа развития современной промышленности, генеральное направление технического прогресса. Цель автоматизации производства заключается в повышении эффективности труда, улучшении качества выпускаемой продукции, в создании условий для оптимального использования всех ресурсов производства. Различают автоматизацию производства: частичную, комплексную и полную. Частичная автоматизация производства, точнее - автоматизация отдельных производственных операций, осуществляется в тех случаях, когда управление процессами вследствие их сложности или скоротечности практически недоступно человеку и когда простые автоматические устройства эффективно заменяют его. Частично автоматизируется, как правило, действующее производственное оборудование. По мере совершенствования средств автоматизации и расширения сферы их применения было установлено, что частичная автоматизация наиболее эффективна тогда, когда производственное оборудование разрабатывается сразу как автоматизированное. К частичной автоматизации производства относится также автоматизация управленческих работ. При комплексной автоматизации производства участок, цех, завод функционируют как единый взаимосвязанный автоматизированный комплекс. Комплексная автоматизация производства охватывает все основные производственные функции предприятия, хозяйства, службы. Она целесообразна лишь при высокоразвитом производстве на базе совершенной технологии и прогрессивных методов управления с применением надёжного производственного оборудования, действующего по заданной или самоорганизующейся программе, функции человека при этом ограничиваются общим контролем и управлением работой комплекса. Полная автоматизация производства - высшая ступень автоматизации, которая предусматривает передачу всех функций управления и контроля комплексно-автоматизированным производством автоматическим системам управления. Она проводится тогда, когда автоматизируемое производство рентабельно, устойчиво, его режимы практически неизменны, а возможные отклонения заранее могут быть учтены, а также в условиях недоступных или опасных для жизни и здоровья человека. При определении степени автоматизации учитывают прежде всего её экономическую эффективность и целесообразность в условиях конкретного производства. А. п. не означает безусловное полное вытеснение человека автоматами, но направленность его действий, характер его взаимоотношений с машиной изменяется; труд человека приобретает новую качественную окраску, становится более сложным и содержательным. Центр тяжести в трудовой деятельности человека перемещается на техническое обслуживание машин-автоматов и на аналитически-распорядительную деятельность. 1. Описание принципиальной схемы управления приводом робота. 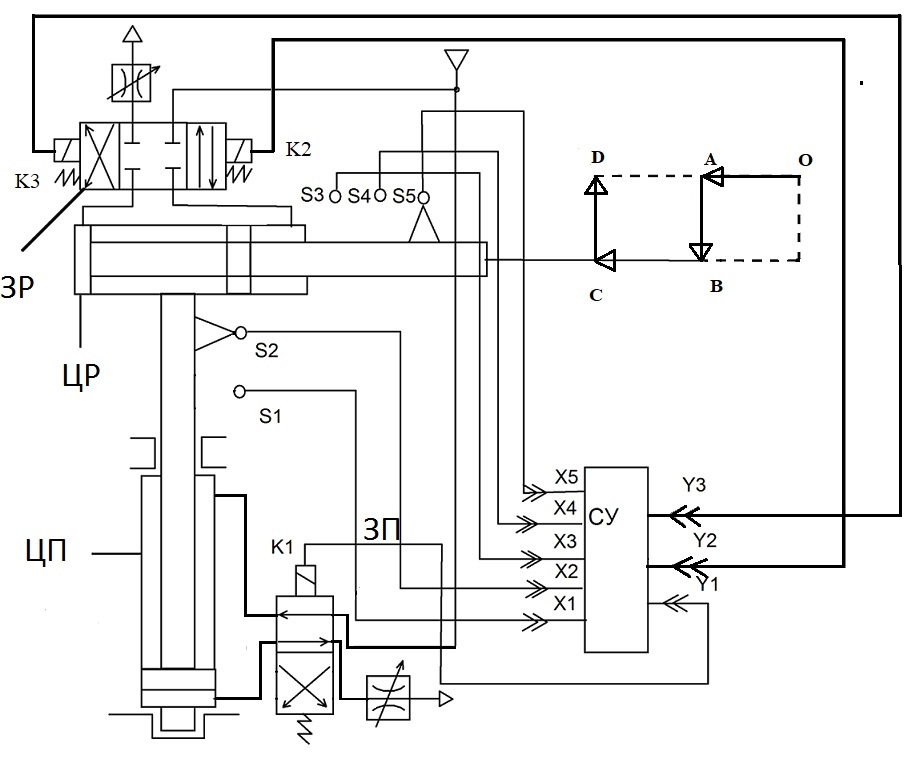 Рис. 1. Принципиальная схема управления приводом робота Принципиальная схема управления приводом робота состоит из пневмоцилиндра ЦП, обеспечивающее перемещение схвата робота по вертикали и пневмоцилиндра ЦР, обеспечивающего перемещение по горизонтали. Пневмоцилиндры управляются электропневмораспределителями ЗП и ЗР, имеющими электромагниты К1, К2 К3 и соответственно. Управляющие сигналы Y1 Y2 Y3 для магнитов формируются кольцевыми выключателями S1 и S2. Направление подачи воздуха изменяется переключением золотника электропневмораспределителя. Золотник пневмораспределителя размещается в корпусе электропневмораспределителя и перемещается внутри его под действием электромагнита с одной стороны и возвратной пружины с другой стороны. Данный электропневмораспределитель является двухпозиционным, при К=0 золотник находится в положении указанном на рисунке, т.е. присоединена нижняя секция распределителя, при К=1 присоединена верхняя секция распределителя. На штоках пневмоцилиндра установлены упоры. Если упор находится напротив кольцевого выключателя, то его значение Si=1. В противном случае Si=0. Таким образом, состояние привода в каждый момент времени определяется комбинацией сигналов, поступавших от конечных выключателей S1,S2,S3,S4 и включением или выключением управлявших электромагнитов К1, К2 и К3 распределителей. Состояние конечных выключателей S1, S2, S3, S4, преобразуется в потенциальные сигналы Х1 , Х2 , Х3 , Х4, Х (например, с помощью схемы включения, показанной на рис. 2); они подаются на вход системы управления СУ. В зависимости от значения входных сигналов X и требуемой последовательности перемещений система управления СУ вырабатывает сигналы управления У1, У2, У3 распределителями К1, К2, К3 .  Рис. 2. Схема включения  2. Составление алгоритма управления роботом.Таблица истинности:
На основе графа функционирования систему управления можно описать следующими структурными логическими формулами в виде дизъюнкции конъюнкций:     3. Составление принципиальной электрической схемы цифровой системы управления приводом робота. Реализовать полученные логические зависимости можно либо традиционным путем проектирования специализированной логической структуры, либо путем программирования универсальной логической структуры (микропроцессора). Составим принципиальную электрическую схему цифровой системы управления приводом робота на логических элементах в программе LOGO и проверим её работу в соответствии с таблицей истинности: 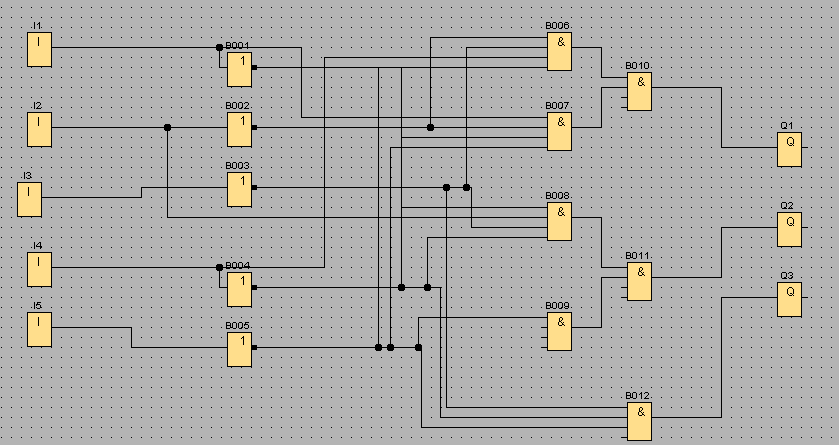 Рис. 4. Схема программирования контроллера LOGO Вывод: Принципиальная электрическая схема цифровой системы управления приводом робота на логических элементах работает в соответствии с таблицей истинности. Заключение: На основе рассмотренного алгоритма составляется конкретная програ-мма которая записывается в память процессора и организует его работу. При изменении цикла движений робота программа изменяется и система управ-ления реализует новый алгоритм управления без каких-либо структурных изменений. По сравнению с описанной выше структурной реализацией логической схемы управления, реализация на микропроцессоре обладает значительной избыточностью. Так, например, набор команд микропроцессора составляет несколько десятков команд, а используется только часть из них, лишь части-чно используется машинное слово и т.д. Это допустимо в том случае, когда стоимость системы управления с микропроцессором соизмерима со стоимос-тью специализированных логических структур системы управления, что обе-спечивается при современном массовом производстве микропроцессоров в виде сверхбольших интегральных микросхем (СБИС) сравнительно невысо-кой стоимости. Достоинством микропроцессорной системы управления является ее ги-бкость, универсальность и высокая степень унификации, которая выступает уже не на уровне элементной базы логической структуры, а на уровне сис-темы управления в целом. |