УПРАВЛЕНИЕ ТЕХНИЧЕСКИМИ СИСТЕМАМИ. Контрольная работа № 1. О сновные элементы
 Скачать 84 Kb. Скачать 84 Kb.
|

|
РОССИЙСКАЯ ОТКРЫТАЯ АКАДЕМИЯ ТРАНСПОРТА МИИТ УПРАВЛЕНИЕ ТЕХНИЧЕСКИМИ СИСТЕМАМИ Контрольная работа № 1 Тема: Основные элементы автоматики машин и оборудования «Проверил» «Выполнил» Студент Радушинский А. В. Доцент Уч. шифр 0908359 ЗДМ – 4,5 _______________ А.Н. Турбин ______________ «» сентября 2011 г. «» сентября 2011 г. Смоленск - 2011 Контрольная работа № 1 Тема: Основные элементы автоматики машин и оборудования ВВЕДЕНИЕ Автоматизация — основа современной технической политики. Она внедряется во всех отраслях промышленности и производства, в том числе в строительстве и путевом хозяйстве. Любой производственный процесс направлен на создание средств производства и предметов потребления. Он представляет собой скоординированное воздействие энергии на различные вещества для получения заданной продукции. Уровень развития средств производства характеризуется механизацией и автоматизацией производства Автоматизация является важнейшим фактором повышения производительности труда. Она позволяет более рационально осуществлять технологические процессы и значительно сокращать цикл изготовления продукции. При этом улучшается ее качество, обеспечивается надежность оборудования, сокращаются расходы энергии и потери труда, гарантируется безопасность работы, уменьшается численность обслуживающего персонала и повышается эффективность производства. Повышение технического уровня персонала и облегчение труда при автоматизации 'способствуют уничтожению различия между физическим и умственным трудом. Для дальнейшего успешного развития автоматизации производства важное значение имеет знание инженерами основ механизации и автоматизации, а также принципа действия автоматизированных процессов, машин и оборудования. Каждый инженер должен стремиться применять их в своей практической деятельности. Основные чувствительные приборы, применяемые в системах автоматики в качестве датчиков, и схемы электрических измерений Классификация датчиков, применяемых в системе автоматики. Привести схему и описание действия одного из датчиков Датчики классифицируют по нескольким показателям: физической природе входной и выходной величины, структуре и принципу преобразования, назначению. В зависимости от физической природы входной и выходной величины различают электрические, механические, гидравлические, пневматические, акустические и тепловые датчики. Наибольшее распространение получили датчики с электрической выходной величиной. По структуре преобразования различают следующие виды датчиков: с непосредственным преобразованием, когда осуществляется лишь одно преобразование (наибольшее распространение в системах автоматики получили датчики, преобразующие неэлектрические величины в электрические); с последовательным преобразованием, когда имеются функциональные промежуточные связи [чаще всего контролируемая величина предварительно преобразуется в электрическую величину другого вида (линейное или угловое перемещение) и затем в электрическую величину]. По принципу преобразования датчики, в которых неэлектрические величины преобразуются в электрические, можно разделить на параметрические и генераторные. В параметрических датчиках при изменении входной величины изменяется один из его параметров, чаще всего активное, индуктивное или емкостное сопротивление. Для работы такого датчика нужен дополнительный источник питания. В генераторных датчиках на выходе вырабатывается энергия одного вида при воздействии на входе энергии другого вида. Датчики предназначены для измерения силы, давления, температуры, перемещения, скорости, ускорения, деформации, частоты и т.д. Кроме того, различаются контактные и бесконтактные датчики. В последнее время все большее распространение получают радиоактивные, ультразвуковые и фотоэлектрические бесконтактные датчики. Фотоэлектрические датчики (фотоэлементы) — это устройства, принцип действия которых основан на явлении фотоэлектрического эффекта (фотоэффекта). Они преобразуют световую энергию в электрическую. Различают три вида фотоэффекта и соответственно три типа фотоэлементов: фотоэлемент с внешним фотоэффектом; фотоэлемент с внутренним фотоэффектом; фотоэлемент с запирающим слоем (вентильный фотоэффект). Используя эти фотоэлементы, можно получить датчики, преобразующие изменения светового потока в изменение тока, сопротивления или ЭДС. Фотоэлементы находят широкое применение в автоматике, вычислительной технике, связи и т.д. Фотоэлемент с внешним фотоэффектом представляет собой ламповый диод, у которого эмиссия катода возникает и изменяется под действием падающего на катод светового потока. В качестве светочувствительного материала часто применяется цезий. Конструкция фотоэлемента с внешним фотоэффектом показана на Рис. 1,а. Он представляет собой вакуумный баллон (колбу) с двумя электродами. Светочувствительный катод наносится обычно непосредственно на стекло колбы и занимает приблизительно половину сферической поверхности, металлический анод располагается против центра катода. С увеличением светового потока Ф, попадающего на катод, увеличивается число эмиттированных электронов, т.е. увеличивается ток. 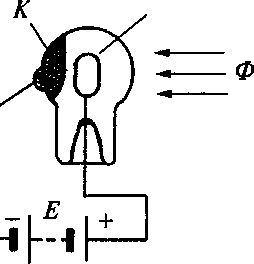 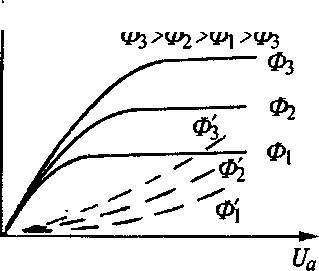 а) б) Рис. 1. Фотоэлемент с внешним фотоэффектом: а) — конструкция; б) — вольт-амперная характеристика: А — анод; К — фотоэлектронный катод; Iф — фототок; Ф —световойпоток; Е — ЭДС источник тока Электровакуумные фотоэлементы с внешним фотоэффек-том изготавливаются двух типов: — электронные фотоэлементы, в которых благодаря высокому вакууму создается чисто электронный ток; — ионные фотоэлементы, в которые введен инертный газ под давлением в сотые доли мм рт. ст. В последних благодаря ионизации ток может быть больше, чем у электронных. Основными характеристиками и параметрами электро-вакуумных фотоэлементов являются вольт-амперная, световая и спектральная характеристики, внутреннее сопротивление и интегральная чувствительность. Вольт-амперная (анодная) характеристика IФ = f1·(Uа) описывает зависимость фототока /Ф от анодного напряжения Uа при постоянном световом потоке Ф. В электронных фотоэлементах вольт-амперная характеристика имеет широкую область насыщения, в которой фототок практически не зависит от анодного напряжения (Рис. 1,б). С увеличением светового потока ток насыщения возрастает (кривые смещаются в стороны больших фототоков). Вольт-амперные характеристики ионных фотоэлементов нелинейные (на Рис. 4.17,б пунктирные кривые). В обозначениях фотоэлементов с внешним фотоэффектом буква Ц указывает, что катод — кислородно-цезиевый, СЦ — сурьмяно-цезиевый, ВСЦ — висмуто-серебряно-цезиевый. Буква Г — фотоэлемент газонаполненный, а буква В —вакуумный. Фотоэлементы с внешним фотоэффектом имеют минимальную чувствительность 20…80 мкА/лм. Они применяются для автоматического включения и выключения освещения и транспортных установок, в устройствах сигнализации и блокировки, для учета штучной продукции. Усилительные устройства реле и исполнительные механизмы, используемые в системах автоматики Электромашинный усилитель. Привести схему и описание действия одного из усилителей Эффект усиления проявляется в генераторе постоянного тока с независимым возбуждением. Так, приращение мощности в цепи возбуждения может вызвать значительно большее приращение мощности, снимаемой с зажимов якоря, однако в этом случае коэффициент усиления по мощности не превышает 100. Более значительный коэффициент усиления (500-1000) получается у генератора, имеющего две обмотки возбуждения: параллельную и независимую (управляющую). В этом случае сопротивление параллельной обмотки возбуждения берется таким, чтобы машина не могла возбуждаться, если в управляющей обмотке нет тока. Небольшой ток в управляющей обмотке заставляет машину возбуждаться. Обычно ЭМУ применяют для управления двигателями постоянного тока мощностью от 0,1 до 10 кВт. В системах автоматики получили распространение ЭМУ с поперечным полем. Они имеют высокий коэффициент усиления по мощности (103…104), сравнительно малую инерционность (0,1…0,3 с) и небольшую мощность управления (около 1 Вт). ЭМУ с поперечным полем представляет собой двухполюсную электрическую машину постоянного тока с двумя парами щеток, расположенных по продольной 1 — 1 и поперечной 2 — 2 осям (Рис. 2). Обмотка независимого возбуждения в ЭМУ называется обмоткой управления ОУ1. Если по обмотке ОУ1протекает ток управления Iу(обычно очень небольшой), то от магнитного потока управления Фуво вращающемся якоре наводится относительно небольшая ЭДС. Так как поперечные щетки замкнуты накоротко, в якоре возникает значительный ток Iя, которым и создается поперечный магнитный поток Ф2. Поэтому небольшой мощности управления Uвх∙Iу соответствует большое изменение мощности на выходе генератора Uя·Iя. Коэффициент усиления представляет собой отношение управляемой мощности к мощности управления: UяIя Ку= ——— . Uвх∙Iу Чтобы магнитный поток управления не изменялся от продольного магнитного потока якоря Ф1, его компенсируют с помощью магнитного потока компенсационной обмотки КО. Для регулирования компенсационной обмотки она зашунтирована переменным сопротивлением Rо. Обычно ЭМУ имеет несколько обмоток управления (на Рис. 2. пунктиром показана обмотка ОУ2). 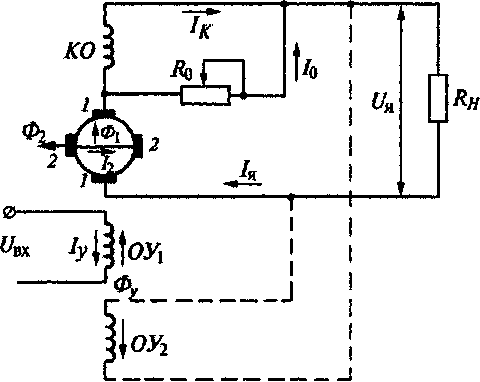 Рис.2. Схема электромашинного усилителя Таким образом, сигнал UВХ, поступивший от контрольного прибора, пройдя через ЭМУ, передается во внешнюю цепь к двигателю, приводящему в действие различные механизмы. 1.3. Управляющие приборы и исполнительные механизмы в системах атоматики Пневматические и гидравлические исполнительные устройства. (Привести одну схему) Различаются две разновидности гидродвигателей — с поступательным и вращательным движением. К первому виду относятся двигатели поршневые и мембранные, а ко второму — ротационные (лопастные и поршневые). Чаще других в качестве исполнительных механизмов применяются поршневые гидродвигатели поступательного движения. Основной частью такого двигателя является гидроцилиндр с поршнем, закрепленным на штоке, который, в свою очередь, жестко соединяется с рабочим органом машины. Для получения вращательного движения в гидравлических системах применяют гидродвигатели с осевым расположением поршней мощностью 0,6; 1,2; 2,5; 5 и 10 кВт. Достоинство гидропривода — высокое давление рабочей жидкости при сравнительно малых габаритных размерах, что позволяет получить на выходе большую мощность и осуществить плавное бесступенчатое регулирование скорости движения. В перспективе строительные машины в большинстве своем будут оборудовать гидроприводом Эти устройства, в основном, поршневые и мембранные, по своей конструкции аналогичны гидравлическим и применяются для привода в действие дроссельных клапанов, зажимных приспособлений, тормозных колодок и т.п. Наиболее часто поршневые устройства применяются в транспортных системах и манипуляторах и имеют стандартные размеры — от 75 до 300 мм. В мембранных устройствах диаметры от 175 до 230 мм. Пневматические устройства дешевле гидравлических, более просты в изготовлении и эксплуатации, не требуют высокого качества уплотнений, не реагируют на изменение температуры и имеют более простые пусковые приспособления. Однако при больших рабочих усилиях они должны иметь значительные габариты. Кроме того, они не могут обеспечить высокой точности перемещения и плавности подачи. СПИСОК ЛИТЕРАТУРЫ 1. А.А. Рульнов, И.И. Горюнов и др. Автоматическое регулирование. М.: ИНФРА-М, 2005, 217 с. 2. В.А. Рогов, А.Д. Чудаков. Средства автоматизации производственных систем машиностроения. М.: Высшая школа, 2005, 400 с. 3. Комплексная механизация и автоматизация погрузочно-разгрузочных работ. Под редакцией И.И. Мачульского, А.А. Тимошина. М.: Издательство «Маршрут», 2003, 400 с. 4. В.Л. Уралов, Г.И. Михайловский и др. Комплексная механизация путевых работ. М.: Издательство «Маршрут», 2004, 382 с. 5. В. Ф. Яковлев, Н. М. Булаш и др. Автоматизация производственных процессов путевого хозяйства и строительства. М.: Транспорт, 1977, 207 с. 6. К. С. Исаев, Ю. М. Бляхин и др. Основы автоматизации транспортного строительства. Учебник для техникумов транспортного строительства, технических школ и пособие для курсов повышения квалификации инженерно-технических работников. М.: Транспорт, 1978, 263 с. 7. К.Л. Богданов, И.В. Зеленов. Основы автоматизации работы строительных машин. М.: Стройиздат, 1976, 175, с. 8. Л.Я. Цукерман. Автоматизация производственных процессов в дорожном строительстве. М.: Транспорт, 1972, 194 с. 9. Л.Г. Брова. Комплексная механизация и автоматизация погрузочно- разгрузочных работ на автомобильном транспорте: Учеб. пособие/ЧПИ им. Ленинского комсомола, Каф. Эксплуатация автомобильного транспорта; Под ред. Л.С. Глухих. Челябинск: Изд-во ЧПИ. Ч. 2.-1982.-63 с. - - |