Майкл ДМерс ГИС. Инициаторы проведения этого новаторского события надеются привлечь к нему внимание мировой общественности и широких масс пользователей географических информационных систем из всех стран.
 Скачать 4.47 Mb. Скачать 4.47 Mb.
|

|
Глава 7 собой связную область, из которой исключены некоторые внутренние полигоны, называемые отверстиями или островами. Очевидно, что между перфорированными и фрагментированными регионами может быть какая-то связь. Если полигоны, содержащиеся внутри перфорированного региона, имеют общие между собой атрибуты, то они могут образовывать регион, но уже фрагментированный. Все рассмотренные объекты, как простые, так и более высокого порядка, должны распознаваться системой, чтобы с ними были возможны операции для дальнейшего анализа. Для каждого из них должна иметься возможность быть выделенным, отдельно затабулированным и отображенным. В векторных и растровых системах, связанных с СУБД, эти объекты чаще всего выбираются в результате поиска в таблицах атрибутов. В простых растровых системах выделение этих объектов может выполняться с помощью переклассификации (тема Главы 9). Но сперва Глава 8 проведет нас через некоторые виды измерений, которые необходимы для более серьезного анализа. Вопросы
6. В чем различия в поиске точечных, линейных и площадных объектов?
10. Что такое центроиды? Как их найти в векторной ГИС? Каковы различные виды центроидов? Чем они отличаются с точки зрения поиска в векторной ГИС? 11. Что такое сети? Чем они отличаются от простых линий? Какие виды сетей существуют? Что нужно для определения сетей в ГИС в противоположность простым линиям? 12. Какова разница между направленными и ненаправленными сетями?
Измерения Наше путешествие в мир геоинформационного анализа только началось. Мы сделали такие же шаги, как и наши предшественники, но на существенно иной почве и с существенно отличающимися инструментами. Тем не менее, эта аналогия полезна. Мы начали путешествие с рассмотрения отдельных объектов и групп объектов. Мы подсчитали, сгруппировали их, отметили, где они находятся, чтобы иметь возможность найти их в дальнейшем. Но простые идентификация, перечисление и определение местоположения объектов обеспечиваются только лишь самую примитивную картину нашего мира. Как и исследователям прошлого, нам нужно знать, что за объекты, где и в каком количестве имеются, насколько они велики, как далеко от нас они расположены и каково расстояние между ними. В этой главе мы займемся измерениями параметров объектов: длин, площадей и периметров, а также рассмотрим взаимосвязи между этими мерами, такие как отношения длины к ширине и периметра к площади. Это даст нам количественные характеристики объектов, которые мы сможем использовать в анализе для сравнения объектов в пределах одного покрытия, а также между покрытиями. Расстояния между объектами могут быть простыми, показывающими кратчайшее физическое расстояние. Но мы можем также обнаружить, что не всегда можно двигаться по кратчайшему пути. От нас может потребоваться следовать по проложенным ранее дорогам. Поэтому мы будем определять расстояние между двумя точками с учетом маршрутов, по которым вынуждены двигаться, препятствий, которых должны избегать, холмов, которые нужно преодолевать. В одних случаях мы будем определять расстояние по приросту, прибавляя к общему пройденному пути длину каждого нового этапа. В других - искать пути получше, легче проходимые места, в общем, наиболее легкие и дешевые маршруты. Эти маршруты наименьшей стоимости могут строиться между двумя точками или от одной точки ко многим другим на нашей местности, давая подсказку будущим путешественникам. Путешествия имеют свою цену. Мы будем отмечать растущую стоимость продвижения по лесам, болотам и пересеченной местности. Мы встретим непреодолимые препятствия, такие как скалы и широкие реки. Иногда реки могут быть пересечены вброд, и мы это отметим для последователей, то есть мы научимся различать барьеры абсолютные и относительные, позволяющие продвижение, но с трудом. И мы найдем меру относительной трудности проходимых барьеров. Добравшись до Главы 13, посвященной картографическому моделированию, вы увидите, как простые меры длины, расстояния, площади и им подобные могут быть скомбинированы со многими другими аналитическими функциями с целью создания намного более сложных моделей, чем было бы возможно без привлечения ГИС. И для того, чтобы получать осмысленные результаты, мы должны знать, как наилучшим образом выполнять измерения. ИЗМЕРЕНИЕ ДЛИНЫ ЛИНЕЙНЫХ ОБЪЕКТОВ Мы знаем, что помимо поверхностей существуют три типа объектов: точечные, линейные и площадные. Точки не имеют пространственных измерений, линии одномерны, области имеют два измерения: длину и ширину. Поскольку точки не имеют пространственной протяженности (а только значения атрибутов), они выпадают из данного рассмотрения. Линии имеют одну меру величины — длину, если не считать значения иных атрибутов, которые могут просто выбираться из БД. Но, как мы увидим, длины линий также могут использоваться в качестве атрибутов, по которым может проводиться классификация линейных объектов. Определение длины вертикальных или горизонтальных линий в растре проводится подсчетом числа ячеек, через которые линия проходит, и умножением его на размер одной ячейки (разрешение) растра. Если линия занимает 15 ячеек по вертикали при разрешении растра 50 метров, то ее общая длина составит 15 х 50 = 750 метров. Аналогично - для горизонтали. Но если линия ориентирована не точно по горизонтали или вертикали, наш метод не будет точным. Например, если линия проходит точно по диагоналям ячеек, то ее длина будет очевидно больше (в данном случае в р. (примерно 1.414) раз), чем произведение разрешения на число ячеек. То есть, для таких линий нужно использовать разрешение растра, умноженное на ^2. Тем не менее, оказывается, что многие простые растровые системы только лишь подсчитывают число ячеек растра и используют это число в качестве длины, оставляя за пользователем вычисление реальной длины. Более совершенные системы используют простую тригонометрию для определения реальной длины линии, имеющей произвольную ориентацию [Environmental Systems Research Institute, 1993]. Более сложная проблема возникает, когда мы имеем дело с извилистой (sinuous) линией, проходящей случайным образом по растру. Если для ее кодирования используется метод присутствия/отсутствия, то вполне вероятно, что такая линия будет выглядеть как некоторое число пар, троек или больших групп ячеек растра, представляющих непрямые части линии. В таком случае может оказаться достаточным простой подсчет числа ячеек, через которые проходит линия, так как точное ее расположение внутри ячеек все равно неизвестно. На самом деле, способность ГИС выполнять тригонометрические операции при подсчете длины представляет небольшую ценность в подобных случаях, так как линейные объекты не так хорошо представляются ячейками растра, которые так или иначе дискретизируют непрерывное пространство. Иначе говоря, точное положение линейного объекта не известно для любой ячейки растра. В зависимости от разрешения растра и извилистости линии, вполне возможно, что целые петли могут быть представлены лишь одной ячейкой растра; в таком случае длина будет преуменьшена независимо от метода ее определения (Рисунок 8.1). Поэтому, если проводимый вами анализ активно использует измерение линейных объектов, то, по возможности, следует использовать векторную структуру данных. 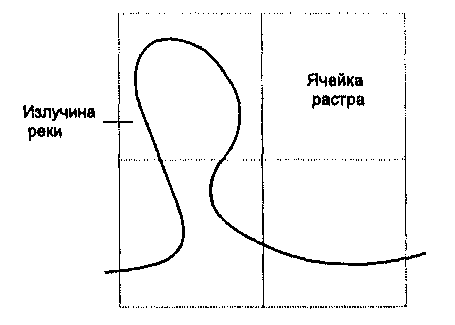 Рисунок 8.1. Линейный объект при низком разрешении. Недостатки измерения длины в растре на примере извилистой реки, целые излучины которой оказываются содержащимися в пределах одной ячейки растра. Определение длины линейного объекта в векторной системе гораздо более точно (как и само представление линии), чем подсчет ячеек растра. Для каждого прямого отрезка из образующих линию система хранит координаты крайних точек, из которых может быть получена по теореме Пифагора длина этого отрезка. Просто сложив длины всех отрезков линии, мы получим точное значение ее общей длины. Нужно только помнить, что векторное представление линейных объектов также использует своего рода дискретизацию, когда кривые участки линии аппроксимируются прямыми отрезками, и чем больше таких отрезков используется, тем точнее Измерения представление объекта в этой структуре данных и тем точнее будет полученное значение общей длины линии. ИЗМЕРЕНИЕ ПОЛИГОНОВ Площадные объекты двухмерны, поэтому мы можем давать им больше характеристик. Мы можем, например, измерять длины короткой и длинной осей полигона, длину его границы (то есть периметр), занимаемую им площадь. Как указывалось в Главе 7, эти меры могут использоваться в качестве вычисляемых атрибутов для классификации областей по размерам. Мы можем использовать их просто для создания отдельных покрытий полигональных объектов определенных размеров, или сохранять их для дальнейшего использования. Линейные меры полигонов Поскольку ориентация полигонов часто связана с природными процессами, эта характеристика может быть важна для пользователей [Muehrcke and Muehrcke, 1992]. Например, несимметричные лесные участки, ориентированные определенным образом, могут легко наблюдаться птицами, когда они пролетают сверху [Baker, 1989; Forman and Godron, 1981; LaGro, 1991; O'Neill et al., 1988]. А гляциологу, занимающемуся историей движения ледников, может потребоваться информация о том, имеют ли определенные ледниковые образования определенную ориентацию. В сущности, идея ориентации полигонов проста. Это всего лишь вопрос определения направления наиболее длинной оси объекта. Большинство растровых ГИС не имеют команд нахождения длинной оси, поэтому задача определения ориентации в них не проста. В векторной модели данных решение состоит в определении расстояний между точками каждой пары противоположных вершин. Наибольшее расстояние соответствует большой оси полигона, а ее угловое направление определяется методами сферической тригонометрии [Robinson et al., 1995]. Аналогично, но уже как минимум, находится малая ось. Но иногда аналитику требуется не ориентация, а соотношение между большой и малой осями. Оно дает простую меру формы, которая может использоваться, например, для выделения объектов с заданным соотношением осей. Пользователю может понадобиться обнаружение всех длинных и узких полигонов, так как они имеют определенную ландшафтную функцию. Такие объекты граничат с окружением на большем протяжении, так что полигон такого типа, являющийся озером, будет иметь большую протяженность береговой линии, что важно для застройщика прибрежной территории. Эколога, исследующего мелких млекопитающих, могут интересовать длинные узкие участки леса радом с сельскохозяйственными угодьями, в которых эти животные прячутся [Turner, 1991]. В любом случае очевидно, что возможность определения отношения длин короткой и длинной осей является полезной функцией ГИС. При определении большой и малой осей полигона гораздо легче иметь дело с выпуклыми полигонами*. Если имеются вогнутости или полигон сильно неправилен, вычисления становятся труднее для описания, а результаты - менее полезными. Один из подходов, называемый наименьшей выпуклой оболочкой (least convex hull), позволяет решить эту проблему, заменяя полигон как бы натянутой на него резиновой оболочкой, которая обязательно будет выпуклой. Но эти расчеты уже выходят за рамки данной книги. Определение периметра Определение периметра полигона состоит в суммировании длин отрезков, составляющих его границу, которые могут быть получены с помощью теоремы Пифагора. Опять же, растровые структуры данных не очень хорошо подходят для этого, но, как и в случае с измерением расстояний, можно определить и периметр. Для этого нужно выделить все ячейки, образующие периметр (довольно часто это требует активного участия пользователя в процессе), подсчитать их количество и умножить его на разрешение растра. Как и в случае с линиями, чем больше будет диагональных отрезков и чем сложнее граница, тем ниже точность результата. Определение периметра - полезная функция, если требуется окружить некоторую область линейным объектом. Например, это может быть дорога вокруг озера. Зная стоимость строительства единицы длины дороги и требуемую длину, легко получить общую стоимость ее строительства. Аналогично можно выяснить необходимое количество материалов для сооружения ограждения вокруг полей фермы. В то время как сам периметр является полезной характеристикой, он часто используется в форме отношения периметра области к ее площади. Сейчас мы рассмотрим определение площадей, а затем вернемся к этому отношению. * Выпуклым называется такой полигон, который целиком лежит по одну сторону всякой прямой, содержащей одну из сторон этого полигона — прим. перев. Вычисление площадей полигональных объектов Определение площадей полигональных объектов - функция ГИС, не менее ценная, чем определение периметра. Застройщикам нужно знать, сколько имеется еще не проданной территории для покупки. Специалисты по живой природе могут быть заинтересованы в вычислении площадей, так как животным определенных видов требуется для существования определенная территория. В растре площадь подсчитывается простым умножением площади ячейки (а это есть разрешение в квадрате) на количество ячеек, занимаемых областью. Вопрос же определения региона рассматривался в Главе 7: для этого вам нужно выбрать все ячейки с определенным значением атрибута. При этом вы получите не только количество этих ячеек, но и их процент от общего числа ячеек покрытия. Можно выполнить и другие сравнения с использованием числа ячеек. Если же вы хотите определить площадь лишь одного или нескольких полигонов из образующих фрагментированный регион одного атрибута, то дело несколько усложняется. В этом случае вы можете переклассифицировать нужные группы ячеек так, чтобы они получили уникальный атрибут. Как мы увидим в следующей главе, в растровых системах обычно имеются функции для отбора отдельных областей по размеру, что облегчает определение полигона, который вы хотите измерить. Если же в покрытии имеется много полигонов примерно одного размера, то вам придется делать выбор по номеру ряда и/или колонки или регистрацией по отдельности ячеек целевой области с использованием имеющихся функций редактирования. В любом случае процесс не труден, просто нужна некоторая предусмотрительность и планирование. Определение площади простых геометрических фигур, таких как треугольник, прямоугольник, параллелограмм, трапеция, круг, эллипс, знакомо вам еще по школе. Вычисления усложняются только тогда, когда полигоны становятся очень сложными. Наиболее простое решение состоит в делении сложного полигона на несколько простых фигур, площади которых легко определяются по формулам, после чего эти числа суммируются [Clarke, 1990]. Во многих векторных ГИС площади полигонов подсчитываются при их вводе и заносятся в таблицы атрибутов, так что в дальнейшем определение площади требует только выборки соответствующего значения из БД. Часто требуется рассмотрение отношения периметр/площадь области, которое является наиболее сжатой характеристикой формы, мерой сложности полигона. Наименьшее такое отношение из всех фигур имеет круг, в то время как вытянутые полигоны имеют большее значение этого отношения. Хотя оно может показаться бессмысленным, многие задачи, особенно связанные с природными ресурсами, используют его. Например, чем меньше это отношение для участка леса, тем больше вероятность обнаружения в нём животных, предпочитающих внутренние области для обитания, что может быть важно для сохранения этого вида. И наоборот, если вы хотите заняться разработкой приозерной территории для туризма, то чем выше это отношение для озера, тем больше длина пляжей, которые можно предложить потенциальным покупателям участков. МЕРЫ ФОРМЫ Как вы только что видели, существует тесная взаимосвязь между формой (очертаниями) и такими мерами, как периметр и площадь для полигонов и длина для линейных объектов. Во многих случаях очертания полигонов и меры извилистости линейных объектов обеспечивают понимание взаимоотношений между объектами и их окружением [Воусе and Clark, 1964; Lee and Sallee, 1970]. Например, извилистость реки связана с такими функциями, как объем переносимого осадка, уклон и расход воды (дебит). В свою очередь, эти функциональные отношения существенно связаны с состоянием реки: происходит ли намыв осадка, находится ли река в состоянии баланса или деградирует. Гидрологи, геоморфологи и другие специалисты используют эти величины в общем анализе состояния региона. И, как мы видели, соотношение между периметром и площадью, как простая мера геометрии полигона, связана с функционированием антропогенных и природных объектов. Следовательно, важно иметь хотя бы общее понимание, что это за измерения, и как они могут выполняться в ГИС. В следующей главе мы увидим, как эти меры могут использоваться в переклассификации участков ландшафта. В ГИС присутствуют лишь относительно простые меры формы, хотя в литературе описаны и более сложные из них [Moellering and Rayner, 1982]. Это опять же указывает на то, что коммерческие ГИС движимы главным образом рынком: в таких измерениях больше всего заинтересовано научное сообщество, но академические исследователи составляют относительно малую часть рынка продаж ГИС. Кроме того, в настоящее время недостаточно развита теория измерений необычных фигур. Традиционная эвклидова геометрия ограничивает нас довольно коротким списком известных фигур, параметры которых исследованы и обсчитаны. Но уже растет интерес и к нетрадиционным видам геометрии, например, к фрактальной, использующей мнимые числа для определения форм. Этот подход не типичен, так что ваш преподаватель спокойно может его проигнорировать. Всё же интересно отметить, что были предприняты по меньшей мере две крупные попытки внедрения этих мер, как и других мер формы и взаимодействия объектов, в векторные и растровые ГИС [Baker and Cai, 1992; McGarigal and Marks, 1994]. А пока мы ограничимся простыми мерами формы, которые имеются в большинстве современных систем. Измерение извилистости Существуют две простые меры извилистости, которые могут использоваться для характеристики линий. Первая, с которой мы уже познакомились, это отношение суммарной длины отрезков, составляющих линию, к расстоянию между ее крайними точками. Чем ближе это значение к единице, тем менее извилиста линия, для прямой линии это отношение составляет ровно единицу. Но часто о форме кривой линии требуется знать больше. Например, очень резкие изгибы дороги с большей вероятностью могут стать причиной аварий. А острая излучина реки вызывает активную эрозию внешнего берега и нанос осадка на внутреннем берегу. По этой причине полезно знать радиус изгиба линейного объекта. Чтобы определить его, мы принимаем, что изгиб является по сути круговым, хотя так может быть не всегда [Strahler, 1975]. Затем мы вписываем окружность в каждое закругление и измеряем ее радиус. Если река представлена полигоном, то появляется возможность измерить еще и отношение радиуса к ширине реки, которое дает еще одну полезную характеристику формы. Как в растровых, так и в векторных системах измерение радиуса кривизны обычно требует участия оператора. Многие ГИС не имеют адекватных средств для таких измерений, но многие специальные системы позволяют проводить такие измерения средствами внешних программ, которые возвращают данные обратно в систему для дальнейшего анализа. Чаще всего пользователю приходится самому вписывать окружности, что может быть довольно утомительно. Поэтому вам нужно оценить важность таких измерений для ваших задач и способность вашей системы производить их. Меры формы полигонов Как мы видели, имеются два основных аспекта измерения формы полигонов. Первый, на основе идеи перфорированных и фрагментированных регионов, имеет общее название пространственной целостности (spatial integrity). Вторая мера, — на основе идеи конфигурации границы, - более близкая к нашему прежнему рассмотрению отношений периметра и площади. Эта мера часто используется совместно с другими функциями, которые позволяют отделять каждый непрерывный полигон от полигонов с теми же самыми значениями атрибута. Другими словами, мы можем измерять конфигурацию границы каждого полигона отдельно от остальной части возможно фрагментированного региона, а не просто отмечать размер всего региона, составленного из нескольких отдельных полигонов. Наиболее распространенной мерой пространственной целостности является функция Эйлера [Berry, 1993]. Одни виды, например, птицы, предпочитают большие непрерывные области определенного типа ландшафта, в то время как другие, такие как олени, ищут большие участки леса, перемежающиеся с меньшими участками лугов или других типов ландшафта. Участок леса, который не имеет разрывов, называется непрерывным; если он полностью окружает меньшие полигоны, то называется перфорированным; если он полностью отделен от аналогичных участков участками другого типа, тогда мы называем его фрагментированным. Функция Эйлера представляет численное выражение степени фрагментированности и перфорированности. Рассмотрим ее идею. На рисунке 8.2 изображены три возможные конфигурации полигонов. Функция Эйлера сопоставляет с каждой из них одно число, называемое числом Эйлера (Euler number), которое определяется так: E = H-(F- 1), где Е - число Эйлера, Н — суммарное количество отверстий во всех полигонах региона, F - количество полигонов во фрагментированном регионе. 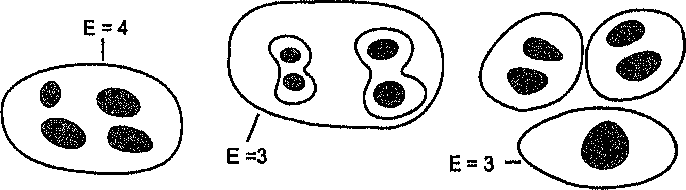 Рисунок 8.2. Примеры чисел Эйлера. Три различные конфигурации и связанные с ними числа Эйлера: а) четыре отверстия в одном сплошном регионе: 4+(1-1)=4; b) два фрагмента, по два отверстия в каждом: 4-(2-1)=3; с) три фрагмента, два с двумя отверстиями каждый и третий - с одним: 5-(3-1)=3. Заметьте, что во втором и третьем случаях число Эйлера одно и то же, несмотря на то, что конфигурации различны. Как следует из совпадения значений числа Эйлера для разных конфигураций, приведенных на Рисунках 8.2а и 8.2b, нужно осмотрительно подходить к объяснению результатов. Вы можете рассмотреть и другие конфигурации, в том числе дающие отрицательные значения числа Эйлера (например, область из трех фрагментов без отверстий: Е = 0 - (3 - 1) = - 2). В Таблице 8.1 приведены некоторые конфигурации с соответствующими значениями числа Эйлера, из которой вы можете увидеть соотношения параметров, дающие одинаковые значения числа Эйлера. Таблица 8.1. Числа Эйлера для различных комбинаций количеств отверстий (Н) и фрагментов (F).* F
Вторая группа мер полигонов, относящихся к их границам, довольно многочисленна. Встречаются меры на основе отношения осей, на основе только периметра, на основе только площадей, на основе соотношений периметра и площади, площади и длин осей, а также другие, измеряющие, например, округлость сторон. Формулы для них вы можете найти в пятой главе одной хорошей книги по использованию математических методов в геологии [Davis, 1986], когда достаточно разовьется ваш интерес к анализу форм, и вы будете иметь достаточный опыт в геоинформатике для их использования. Одни специальные меры имеются в коммерческих ГИС, другие - в геостатистических программах или в составе дополнительных модулей коммерческих ГИС [Baker and Cai, 1992; McGarigal and Marks, 1994]. * Отметьте количество конфигураций с одним числом Эйлера. Обратите также внимание на отражение с противоположным знаком чисел таблицы относительно главной диагонали. Большинство этих мер связано с отношением периметра к площади. На самом деле, само это отношение может рассматриваться как мера полигональной формы. Однако, оно не описывает реальную геометрическую форму объекта. Вместо простого отношения было бы неплохо иметь некоторую более "формообразную" меру. Для этого мы чаще всего сравниваем имеющиеся полигональные фигуры с более знакомыми фигурами, которые можем легко описать [Muehrcke and Muehrcke, 1992]. Например, мы могли бы сравнивать их с параллелограммами, трапециями и треугольниками. Но даже эти фигуры очень разнообразны, в то время как круг является наиболее простой, компактной и легко определимой фигурой. По этой причине основным методом измерения формы является сравнение ее с кругом. В связи с использованием круга как сравнительной фигуры, мы можем говорить, что эта мера является также и мерой выпуклости или вогнутости (convexity or concavity) полигона. Крут является наиболее выпуклой фигурой, вот почему мы используем его для измерения формы других объектов. Как известно, все другие геометрические фигуры имеют большую длину периметра при том же значении площади. Сравнение имеющегося многоугольника с крутом, по сути, - то же, что рассмотрение величины выпуклости этого полигона по сравнению с выпуклостью круга. Общая формула выпуклости в векторных ГИС такова: CI = k Р/А, где: CI - индекс выпуклости, к - некоторая константа, Р - периметр, А -площадь. Здесь мы имеем отношение периметра к площади, умноженное на некоторую константу. Эта константа определяется размером круга, описанного вокруг многоугольника, так что индекс принимает значения в диапазоне 1...99, причем большее значение соответствуют большему сходству с кругом, а 100 получается, если мы возьмем идеальный круг. В растре формула основана на той же идее, но здесь площадь определяется как количество клеток, а квадратный корень из нее используется для получения того же диапазона 1...99 значений сходства. При этом надо помнить, что в растре мы физически не можем иметь идеальный круг. Формула определения выпуклости в растре такова: CI = P/^N где: CI - индекс выпуклости, Р - периметр, N - площадь в растровом формате. Вернемся к вопросу о том, для чего же нужна мера выпуклости. Задайте себе такой вопрос: почему американские колонисты, атакуемые индейцами, выстраивали повозки в круг? Почему не в квадрат, треугольник или как-нибудь еще? Ответ состоит в том, что при заданной площади крут имеет наименьший периметр из всех фигур. Многие существа, в том числе и человек, ценят защитный характер круга, с его более легко обороняемым периметром. Хотя есть и такие, как, например, некоторые мелкие грызуны, которые любят края. Они используют эти края для вылазок на открытые пространства полей, оставаясь при этом вблизи леса для бегства и укрытия. Имеется еще одна мера конфигурации границ, называемая развитостью границы (edginess) [Berry, 1993], которая использует краевой фильтр. Фильтры (см. Главу 9), используемые для оценки или изменения растровых изображений, являются матрицами коэффициентов, которые применяются к ячейкам растра, находящимся в "окне" подматрицей. После выполнения операции с одной группой ячеек, матрица смещается на одну ячейку в сторону и операция повторяется, что дало название скользящее окно (roving window). В дистанционном зондировании фильтры используются для двух основных задач — подчеркивания деталей (sharpening) и сглаживания (smoothing). Фильтры первого типа подчеркивают линии и края областей, второго - наоборот, ослабляют резкие переходы между значениями соседних ячеек растра. Хотя эти приложения фильтров больше ассоциируются с классификацией, мы рассматриваем их здесь как средства оценки конфигурации границ.  Рисунок 8.3. Развитость границ в растре. Использование скользящего окна для определения индекса границ. Возьмем окно размером 3x3 ячейки, наложенное в двух местах границы области (Рисунок 8.3). Каждой ячейке матрицы мы присваиваем единицу, если она имеет тот же атрибут, что и край, который нас интересует, и ноль, если она имеет атрибуты любого другого объекта покрытия. Индекс границ получается простым подсчетом числа ячеек с единицами, т.е. таких, которые имеют то же значение атрибута, что и наш полигон. Чем больше единиц, тем меньше границ и тем больше внутренней области мы имеем. Поэтому, значение 7 на Рисунке 8.3 указывает на малую развитость границы. Значение 9 соответствует внутренней области полигона, где все ячейки растра соединены и вообще нет границ. И наоборот, значение 2 на Рисунке 8.3 показывает, что только небольшое число нужных ячеек растра имеется в окне, а остальные относятся к фону. Оно указывает на небольшой узкий выступ в окружение. Иначе говоря, во втором случае окно покрывает большое количество краев. ИЗМЕРЕНИЕ РАССТОЯНИЙ Измерения форм сейчас становятся все более важными в географическом анализе, в частности, благодаря растущему пониманию связей между формами и функциями ландшафтов. В то же время, существует устоявшийся интерес к измерению расстояний. Измерение расстояний между объектами важно не только для дальнейшего анализа отношений между ними, но и как непосредственная оценка движения к ним, от них и вокруг них. Как вы увидите, расстояние может измеряться довольно просто - как физическое расстояние между двумя точками. Но кроме того, измерение расстояния может учитывать стоимость продвижения по пересеченной местности или по дорожной сети в противоположность движения напрямую, или в обход барьеров, которые препятствуют движению. Эти меры называются функциональными расстояниями (functional distance). Простое расстояние Как мы уже видели, определение простого расстояния, известного также как эвклидово расстояние, относительно просто и в растровых, и в векторных ГИС. В растровых системах расстояние измеряется количеством ячеек между точками, которое может преобразовываться в стандартные единицы умножением на величину разрешения растра. Расстояния по диагонали определяются по теореме Пифагора. Кроме такого способа определения расстояния между точками существует и другой, при котором заранее просчитываются расстояния от определенной точки до всех других возможных точек покрытия. В растре это делается созданием набора концентрических окружностей с центром в заданной точке, каждая последующая из которых имеет радиус на одну ячейку больше. В результате образуется изотропная поверхность (isotropic surface), поскольку она одинакова по всем направлениям (Рисунок 8.4а). В трехмерном пространстве она может изображаться как конус, центр основания которого находится в выбранной точке. Карта изотропной поверхности является по сути картой путешествий из заданной точки ко всем другим объектам базы данных. Такая карта имеет тот же эффект, что и полная карта дорог, показывающая 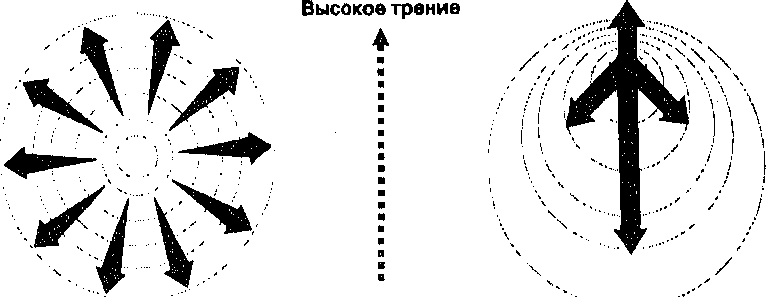 расстояния путешествия по всем направлениям от заданной начальной точки. Ее преимущество очевидно, когда нам требуется выполнить множество измерений расстояния от одной точки, - они уже содержатся в изотропной поверхности. В дальнейшем мы увидим, как мы должны модифицировать изотропную поверхность для учета различий на поверхности и существования барьеров. Фрикционное расстояние Т Низкое трение Простое расстояние (Изотропная поверхность) Рисунок 8.4. Простое и функциональное расстояния. a) Отсчет простого расстояния от центральной точки создает изотропную поверхность. b) Изменение изотропной поверхности из-за сопротивления при передвижении. Есть также вариант этого метода, в котором расстояния отмеряются не от точки, а от полигона. Например, это могут быть расстояния от границы города. В результате мы опять имеем карту путешествий ко всем точкам покрытия вне города от его границы. Как уже говорилось, в векторном покрытии расстояние между двумя точками определяется по теореме Пифагора, а общей длиной многосегментной линии является сумма длин составляющих ее отрезков. Поскольку векторные структуры данных не определяют явным образом содержимое пространства в промежутках между введенными объектами, в этих промежутках не могут выполняться и расчеты. Указанное ограничение также относится и к созданию изотропных поверхностей. Для выполнения таких расчетов требуется другая структура векторных данных, специально созданная для моделирования поверхностей. Наиболее распространенной такой структурой является упомянутая в Главе 4 нерегулярная триангуляционная сеть (TIN), которую мы рассмотрим более подробно в Главе 10. В этой модели могут определяться расстояния, но со значительными вычислительными затратами. Пользователи ГИС, работающие с моделями поверхностей, чаще всего полагаются на растровые системы, особенно тогда, когда требуется измерять расстояния на поверхностях. функциональное расстояние Хотя эвклидово расстояние полезно, нашу способность двигаться по прямой часто ограничивают препятствия или сложная местность. Например, мы можем быть ограничены либо использованием сетей, таких как авто- и железные дороги, либо потому, что местность слишком пересеченная, образуя фрикционную поверхность (friction surface), либо из-за ограждений, окружающих промежуточное пространство, которые действуют как барьеры (barriers) на нашем пути*. Фрикционные поверхности - это области, которые замедляют наше продвижение, увеличивая время достижения заданной точки по сравнению с поверхностью без сопротивления (Рисунок 8.4). Барьеры бывают двух типов (Рисунок 8.5): абсолютные (absolute), движение через которые невозможно (скалы, огражденная территория, озеро и т.д.), и условные (relative), которые идентичны фрикционным поверхностям, но занимают лишь небольшие участки покрытия. Примерами условных барьеров могут быть холмистая местность, мелкие реки, преодолимые внедорожными машинами, или участки леса, которые тормозят, но не останавливают полностью движение стада животных. Абсолютные барьеры останавливают или отклоняют движение, в то время как относительные барьеры и фрикционные поверхности налагают некоторую стоимость на передвижение, замедляя его или требуя большего расхода энергии. При движении по изотропной поверхности без барьеров, ГИС просто добавляет одну ячейку растра на единицу пути, и результирующая поверхность функциональных расстояний будет подобна (с разницей лишь в абсолютных значениях) поверхности простых геометрических расстояний. При этом не важно, насколько большое или малое значение импеданса (impedance), или сопротивления, приходится на единицу пути. * Автор недостаточно ясно проводит различие типов поверхностей. Поверхность может быть изотропной, т.е. с одинаковыми свойствами независимо от направления движения по ней, и анизотропной (при этом на ней не обязательно должны быть барьеры). Фрикционная поверхность создает сопротивление, при этом она может быть и изотропной. — прим. перев. Представьте себе движение по растру слева направо вдоль строки пикселов. Допустим также, что мы хотим разместить условный барьер от верха до низа карты перпендикулярно этому направлению движения. Мы можем сделать это, приписав пикселам, выстроенным в вертикальную линию, значение импеданса, равное не единице, а, скажем, пяти. Тогда, двигаясь слева направо, до барьера мы испытываем сопротивление в одну единицу на каждую проходимую ячейку растра. Подойдя же к барьеру, мы должны приложить в пять раз больше усилий (выражаемых количеством бензина, времени, или потерей скорости движения) на преодоление только одной ячейки, принадлежащей барьеру, чтобы попасть за него. То есть, если до барьера график затрат выглядел бы как наклонная прямая линия, то в месте барьера на этом графике появится вертикальный скачок. Такой барьер называется относительным (или условным), так как он может быть преодолен при приложении дополнительных усилий. 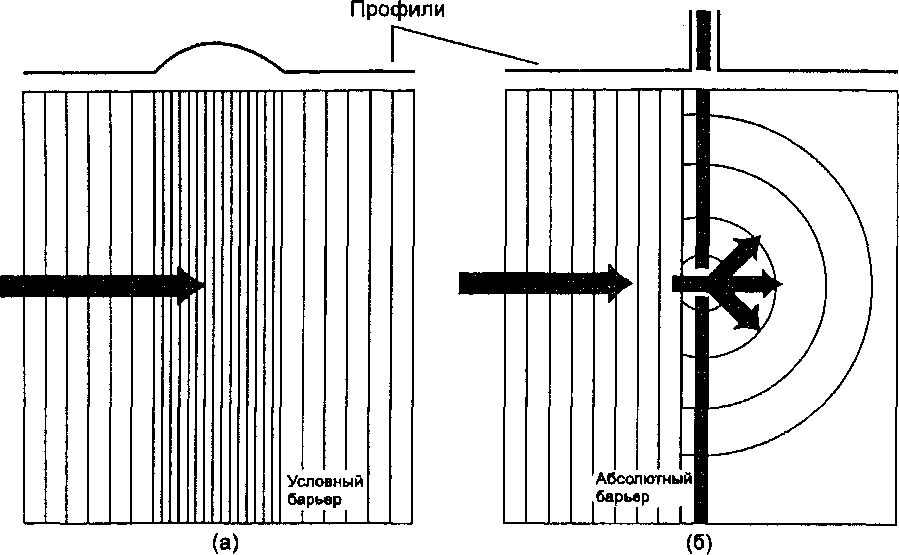 Рисунок 8.5. Условные и абсолютные барьеры. Условные барьеры (а) имеют определенную стоимость их преодоления. Абсолютные барьеры (b) либо полностью останавливают движение, либо отклоняют его к какой-нибудь доступной проходимой точке. Условный барьер может быть не только тонкой линией, но и площадным объектом. Конкретное значение импеданса может быть связано как с фактом полного прохождения такой области, так и с фактом проникновения внутрь нее на единичное расстояние. В первом случае обычно говорят о барьере, а во втором - о распределенном импедансе, о райнировании территории по величине затрат на передвижение, о поверхности, представляющей функцию затрат. Возможен также предельный случай, когда значение импеданса будет разным в каждой ячейке растра. И даже более того - значение импеданса даже в одной ячейке может быть различным при передвижении через нее по разным направлениям. Например, оно может зависеть от направления ветра или от ориентации снежных застругов в тундре. Абсолютный барьер можно представить себе как некоторое продолжение идеи условного барьера. Для линейного объекта мы просто присвоить ему значение импеданса, непреодолимое в рамках решаемой задачи. На Рисунке 8.6b ячейкам барьера приписано значение импеданса 1000, которое считается непреодолимым, и, следовательно делает барьер абсолютным. В других случаях этого значения может оказаться недостаточно, поэтому вы должны сами решать, какое значение использовать для вашей конкретной задачи. 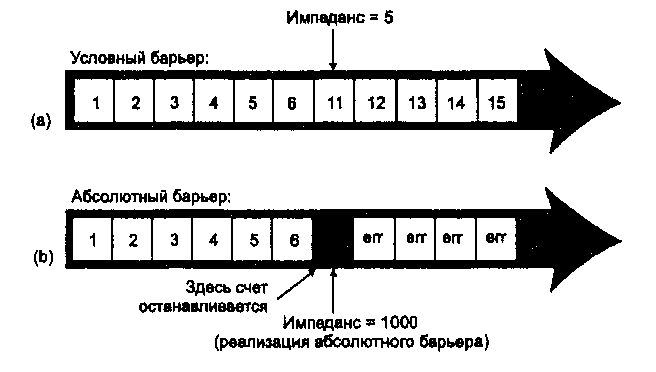 Рисунок 8.6. Импеданс. Нарастающие значения стоимости передвижения при встрече с условным барьером (а) и абсолютным барьером (b). Хотя сама идея присвоения значений импеданса - проста, использование ее часто вызывает трудности. Каково сопротивление леса для стада оленей, движущегося через него? Насколько больше бензина тратит автомобиль на подъеме в 15% по сравнению с горизонтальным движением? Насколько дольше крупное млекопитающее переплывает реку шириной 100 метров по сравнению с переходом по мосту такой же длины? Это вполне реальные вопросы, которые должны получать ответы перед тем, как мы создадим наши барьеры и фрикционные поверхности. Чаще всего конкретного ответа не просто нет, а он еще и зависит от таких трудноопределимых параметров, как подвижность оленей, КПД автомобиля или плавательных способностей зебр. Другими словами, чаще всего у нас нет точных значений сопротивления. Обычно мы прибегаем к употреблению порядковой ранжирующей системы для присваивания величин импеданса, основываясь на сравнении относительной трудности движения по каждой встречающейся фрикционной поверхности или через барьеры. Это не всегда легко, а Измерения результаты не так точны, как нам хотелось бы. В установке этих величин рекомендуется действовать с осторожностью, убедившись, что использованная система достаточно обоснована, и что сравнения допустимы. Прежде всего, результаты анализа расстояний с использованием барьеров и фрикционных поверхностей должны рассматриваться с определенной критичностью, особенно если эти результаты используются для принятия каких-либо решений. Перед тем, как приступить к растровым подходам для неэвклидовых и функциональных расстояний, мы должны рассмотреть две дополнительные характеристики расстояний. Расстояние может рассматриваться не только как эвклидово или неэвклидово, изотропное или функциональное, но также и как инкрементное, или нарастающее расстояние (incremental or cumulative distance). Инкрементное расстояние складывается из длин этапов пройденного пути. Каждый последующий этап добавляется просто как мера длины, наподобие того, как это делалось с изотропной поверхностью. Другими словами, инкрементное расстояние - это кратчайший путь между двумя точками без учета сопротивления в пути. Если инкрементное расстояние измеряется по всей поверхности, то в результате мы получаем поверхность кратчайших расстояний (shortest path surface), если же этот метод ограничивается линиями или дугами (или линейными группами ячеек растра), то мы имеем дело с линиями кратчайших расстояний, а не с поверхностью. Целью определения функционального расстояния на поверхности с сопротивлением (например, топографической) является поиск маршрута наименьшей стоимости (least-cost distance), или кратчайшего расстояния между двумя точками покрытия*. Аналогично мы можем построить и поверхность наименьшей стоимости для перемещения из одной точки во все другие точки покрытия. Рассмотрим два этих случая по отдельности. * В реальных задачах обычно учитываются стоимостные показатели нескольких покрытий, которые с помощью весовой функции сводятся к некоторому общему стоимостному покрытию. О построении таких поверхностей см. пример в Главе 13. — прим. перев. Допустим, что мы имеем дело с реальной топографической поверхностью, и стоимость связана с изменением значения высоты от ячейки к ячейке. Мы могли бы поместить каплю воды на вершину нашей поверхности и проследить ее движение, которое будет путем наименьшего сопротивления. Между прочим, многие программы используют в качестве команд такие слова как "drain" (сток) или "stream" (поток, река). Для создания маршрута наименьшей стоимости (в противоположность кратчайшему маршруту) на растре размером 5x5 мы начинаем с верхней ячейки и ищем среди восьми соседей ячейку с наименьшим значением импеданса (в данном случае - с наименьшим значением высоты). Эта ячейка помечается флажком и становится начальной точкой для следующей итерации. Процесс продолжается, пока не будет достигнута наименьшая высота покрытия. Таким образом, из отмеченных ячеек мы получаем маршрут от вершины холма к подножию, который требует наименьшее количество усилий (Рисунок 8.7а). Более реалистичная версия такого поиска приведена на Рисунке 8.7b. 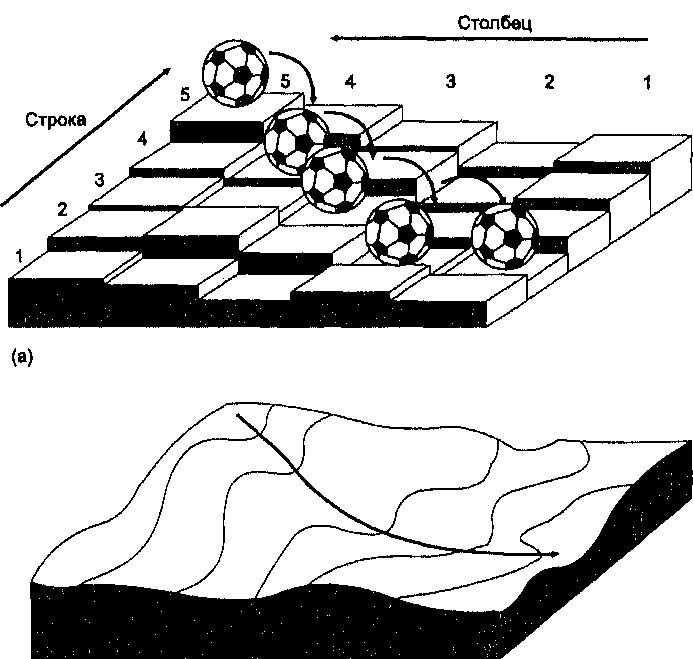 (б) Рисунок 8.7. Маршрут наименьшей стоимости. Определение маршрута наименьшей стоимости требует сравнсния начальной ячейки с ее непосредственными соседями: а) пример с футбольным мячом; b) то же в случае реки, текущей по склону холма. Хотя одного маршрута наименьшей стоимости часто достаточно, может оказаться полезным просмотреть все возможные маршруты из определенного места с учетом стоимости передвижения по фрикционной поверхности. Посмотрите на Рисунок 8.8. Здесь мы имеем две сетки растра: первая — это массив значений импеданса, вторая — вычисленные значения нарастающего расстояния с учетом импеданса. Процесс вычисления немного сложнее, чем только что рассмотренный поиск кратчайшего маршрута. Здесь программа не просто ищет наименьшее значение, но вычисляет значение для каждой смежной ячейки с учетом как эвклидова расстояния, так и значения импеданса. При необходимости могут вычисляться и диагональные расстояния между ячейками. Фрикционная поверхность Нарастающее расстояние 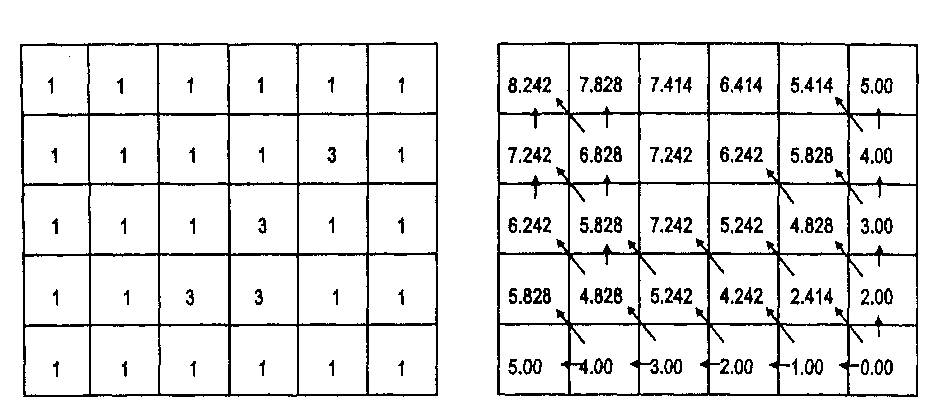 Нарастающее расстояние = предыдущее (функциональное) расстояние + + следующее (функциональное) расстояние... Рисунок 8.8. Нарастающее расстояние. Поверхность нарастающей стоимости: а) фрикционное покрытие, b) вычисленные значения. Отметьте, что диагональные ячейки используют значение 1.414 в качестве расстояния вместо 1 для горизонтальных и вертикальных. Выделены ячейки со значением импеданса 3, Для накопления расстояния предыдущее значение складывается с вычисленным. Процесс начинается в ячейке (0,0). Для каждой соседней ячейки расстояние считается инкрементами по полшага умножением каждой занятой ячейки растра (включая начальную) на ее значение сопротивления и на значение ее ширины (1 для горизонтальных и вертикальных ячеек и 1.414 - для диагональных). Поскольку мы движемся из середины начальной ячейки к середине следующей, мы умножаем каждую на 0.5, чтобы показать инкремент в полшага. Таким образом, формула для каждого шага на половину ячейки растра такова [Berry, 1993]: 0.5 (расстояние по сетке х коэффициент трения). Затем мы должны прибавить это к накопленной величине сопротивления. Так, для движения из ячейки (6,6) к ячейкам (5,5), (4,4) и (5,6) вычисления |