Расчет водорода. Расчет электропривод 2. Исходные данные определение продолжительности цикла
 Скачать 403.95 Kb. Скачать 403.95 Kb.
|

|
Оглавление Исходные данные …..……... 2 Определение продолжительности цикла …………………….4 Предварительный выбор электродвигателя . ………………7 Определение моментов на валу двигателя ………………..….. 7 Определение начального пускового момента …………… Построение пусковой диаграммы ………….……………………..... 8 ………………………..... 9 Определение установившихся скоростей движения и токов ..……………………....12 Определение длительности пуска электродвигателя …………..……...….13 Определение фактической относительной продолжительности включения ………..……14 Определение среднеквадратичного тока при спуске............................15 Определение сопротивления движению …………..……...….15 Предварительный выбор электродвигателя ………..……16 Определение длительности разгона ............................17 Определение токов при статической и динамической нагрузках ...........................18 Проверка предварительно выбранного двигателя …………..……...….19 Расчет и выбор пускорегулировочных резисторов ………..……70 Список используемых источников ...............76 1. ОПРЕДЕЛЕНИЕ МОЩНОСТИ И ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ МЕХАНИЗМА ПОДЪЕМА ОДНОЛЕБЕДОЧНОГО КРАНА Исходные данные Если величина не задана, она принимается равной от 0,05 до 0,08 грузоподъемности крана (для крюкового крана). i — общее передаточное число механизма подъема, равное произведению передаточного числа редуктора лебедки на кратность полиспаста; H — средняя высота подъема, м;  1.2. Определение продолжительности цикла Цикл механизма подъема однолебедочного крана состоит из четырех основных операций: подъема груза, спуска груза, подъема и спуска пустого грузозахватного приспособления. Для введения единообразия в формулах все величины, относящиеся к подъему номинального груза, снабжаются индексом 1, к спуску номинального груза — индексом 2, к подъему пустого грузозахватного приспособления — индексом 3 и к спуску пустого грузозахватного приспособления — индексом 4. Так как задана относительная продолжительность включения двигателя подъема, то примерная длительность работы его за час может быть определена по формуле (в секундах) где ПВ выражена в долях единицы. Затем определяется приближенная длительность работы двигателя механизма подъема в течение одного цикла (в секундах) Число циклон в час в этом случае определится как а продолжительность цикла (в секундах) 1.3. Предварительный выбор электродвигателя Рассчитывается величина мощности, необходимая для подъема номинального груза (в кВт): Затем определяется необходимая частота вращения двигателя по формуле (в об/мин): Тогда выбираем второй двигатель из каталога приложений 1.4. Определение моментов на валу двигателя Как известно, в статических режимах момент, развиваемый электродвигателем, равен моменту сопротивления. При подъеме номинального груза двигатель должен развивать момент (в Н Если передаточное число где Момент на валу при опускании номинального груза определяется по выражению (в Н Момент на валу двигателя при подъеме пустого грузозахватного приспособления При подъеме пустого грузозахватного приспособления значение коэффициента полезного действия механизма Величина  =17,819/ (11) =17,819/ (11)где Момент где 1.5. Определение начального пускового момента Начальный пусковой момент двигателя определяется исходя из допустимых средних ускорений при подъеме номинального груза. Значения этих ускорений для механизма подъема кранов различной грузоподъемности приведены в табл. 1.1.( значения анализируются по годам)  Табл. 1.1.
Суммарный момент инерции системы, приведенный к валу двигателя, определяется по формуле (в где ( Если в каталогах приведены не моменты инерции, а маховые моменты, то значение момента инерции определяется из соотношения (в где Для определения максимально допустимого значения начального пускового момента рассчитываем вспомогательный коэффициент С 1.6. Построение пусковой диаграммы Пусковая диаграмма строится для режима подъема номинального груза, т.е. момент сопротивления принимается равным Момент переключения берегся на 10% больше момента сопротивления. Естественная механическая характеристика кранового асинхронного двигателя строится по четырем координатам (предполагается, что в диапазоне рабочих нагрузок характеристика прямолинейна): где Моменты для стандартных значений ПВ определяются по известному выражению (в Н  1.7. Определение установившихся скоростей движения и токов, потребляемых двигателем при статических нагрузках Для определения установившихся скоростей движения номинального груза и пустого грузозахватного устройства в направлениях спуска и подъёма строятся «рабочие» характеристики электродвигателя в I ‒ IV квадрантах (рис.4). По данным характеристикам и величинам моментов По полученным величинам В данном случае нецелесообразно искать отрицательную скорость По номинальным токам статора при стандартных значениях ПВ и току холостого хода (см. данные каталога) предварительно выбранного двигателя строится характеристика  1.8. Определение длительности пуска электродвигателя При каждом включении двигателя в период разгона ему приходится преодолевать не только моменты статического сопротивления, но и момент динамического сопротивления, обусловленный инерцией ускоряемой механической системы. Длительность разгона в операции подъема номинального груза при ступенчатом пуске для прямолинейно убывающего избыточного момента определяется по выражению (в с):  = 0,91029 = 0,91029 (20) где В операциях опускания номинального груза, подъема и опускания пустого грузозахватного приспособления длительности разгона определяются по формулам (в с):  (21) (21) =1,009 (22) =1,009 (22) =2,9 (23) =2,9 (23)При опускании пустого грузозахватного приспособления (крюка) Значения начальных и конечных избыточных моментов определяются по следующим выражениям (в При опускании номинального груза: При подъеме пустого грузозахватного приспособления: При опускании пустого грузозахватного приспособления: 1.9. Определение фактической относительной продолжительности включения Предварительно определяются длительности работы привода с установившейся скоростью для каждой операции ( Путь груза Откуда длительность работы привода с установившейся скоростью (в с.): где  1.10. Определение среднеквадратичного тока при пуске Как известно, при линейно-убывающем избыточном моменте значение тока двигателя меняется по экспоненциальному закону от величины  = 1,9127 (27) = 1,9127 (27)где Величины этих токов определяются по графику 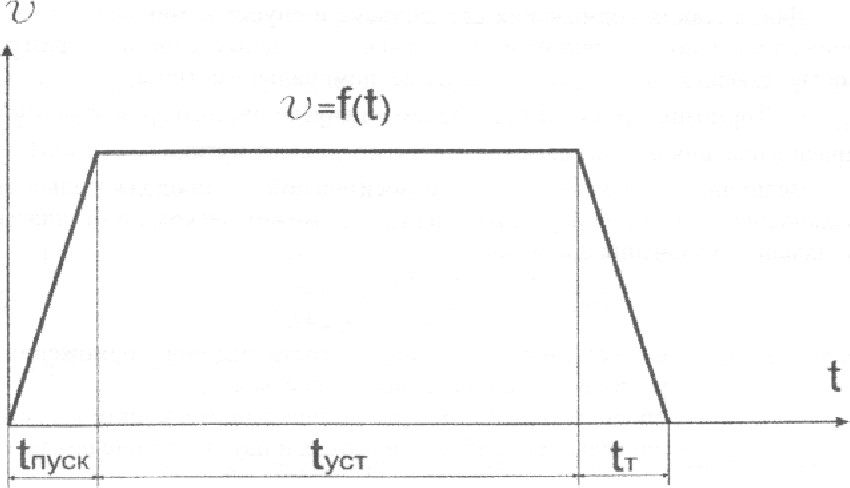 Рис. 5 Тогда зависимость линейная и данные рассчитаны верно 1.11. Определение повторю кратковременного тока Повторно кратковременный ток определяется по следующей формуле:  =65,819 (28) =65,819 (28)где 0,75 — коэффициент, учитывающий ухудшение охлаждения двигателя с самовентиляцией в период разгона и торможения. Значение среднеквадратичного тока при торможении ориентировочно принимается равным Полученный повторно кратковременный ток соответствует фактической относительной продолжительности включения Для того, чтобы сравнить этот ток с номинальным током предварительно выбранного двигателя, необходимо привести его к стандартному значению 1.12. Проверка предварительно выбранного двигателя на тепловую способность Для того, чтобы предварительно выбранный двигатель можно было считать наиболее подходящим для данного механизма подъема, необходимо, чтобы было удовлетворено следующее неравенство: где Если это неравенство не удовлетворено, то необходимо вновь выбрать двигатель и повторить расчет, начиная с п. 1.3. 2. ОПРЕДЕЛЕНИЕ МОЩНОСТИ И ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ ПОРТАЛЬНОГО КРАНА 2.1. Исходные данные G — вес крана без груза, тс; v — скорость передвижения, L — расчетная длина пути, м (для портальных кранов речных портов можно принять L = 50 S— подветренная площадь крана, f — коэффициент трения качения для катков (f = 0,05 см); 2.2. Определение сопротивления движению Сила, которая должна быть приложена к крану для перемещения его при отсутствии ветра, определяется по формуле (в Н.): Сопротивление движению от ветровой нагрузки равно (в Н): Полное сопротивление движению 2.3. Предварительный выбор электродвигателя Мощность, требуемая для передвижения крана, определяется по формуле (в кВт): Двигатель передвижения портала работает в кратковременном режиме. При кратковременной работе длительностью не более 10 минут по данным завода «Динамо» крановые двигатели, предназначенные для работы в повторно-кратковременном режиме при ПВ= 0,25, могут быть перегружены до величины момента равного С этой целью определяется длительность работы двигателя и убеждаются, что Так как на механизме передвижения портала устанавливают 2 или 4 электродвигателя, то примерная мощность одного из них при ПВ = 0,25 находится по выражению: где По каталогу выбирают двигатель мощностью равной или ближайшей большей где 2.4. Определение длительности разгона Задаются начальным пусковым моментом, равным предварительно выбранного электродвигателя (в Н где Определяют начальное и конечное значения избыточного момента где Длительность разгона определяется по формуле (в с):  =52,729 (37) =52,729 (37)где 1,5 — коэффициент, учитывающий приведенные к валу двигателя моменты инерции других вращающихся частей механизма. 2.5. Определение токов при статической и динамической нагрузках Так же, как и для двигателя механизма подъема (п. 1.7), строят для предварительно выбранного двигателя характеристику  2.6. Определение длительности работы с установившейся частотой вращения Величину 2.7. Определение кратковременного тока за время работы  =6,919 (39) =6,919 (39)где 2.8. Проверка предварительно выбранного двигателя При этом должно быть удовлетворено неравенство где Если по длительности разгона предварительно намеченный двигатель не подходит (см. п. 2.4) и пришлось выбрать двигатель большего габарита, то левая часть неравенства может быть не удовлетворена. В этом случае необходимо указать, что мощность выбранного двигателя по нагреву завышена для обеспечения динамической способности.  3. РАСЧЕТ И ВЫБОР ПУСКОРЕГУЛИРОВОЧНЫХ РЕЗИСТОРОВ 3.1. Общие положения В задании указывается, для какого именно двигателя в проекте должны быть рассчитаны и выбраны резисторы. Расчет может вестись как графическим, так и аналитическим методами, изложенными в курсе теории электрического привода. Необходимую при расчете резистора величину активного сопротивления фазы обмотки ротора Где 3.2. Порядок выбора резисторов Ступень ускорения Ступень противовключения Ступень предварительна Ступень невыключаемая где 4. ВЫБОР ЭЛЕКТРОПРИВОДА МЕХАНИЧЕСКОГО ТОРМОЗА Для механизма подъема: где Для механизма горизонтального передвижения (тележки моста, портала): где Для механизма изменения вылета уравновешенной стрелы. где Для механизма поворота:  = 7,920 (49) = 7,920 (49)где Общий цикловой график  |