Двигатели. Исследование асинхронных двигателей методические указания к лабораторным работам по электрическим машинам
 Скачать 1.89 Mb. Скачать 1.89 Mb.
|

|
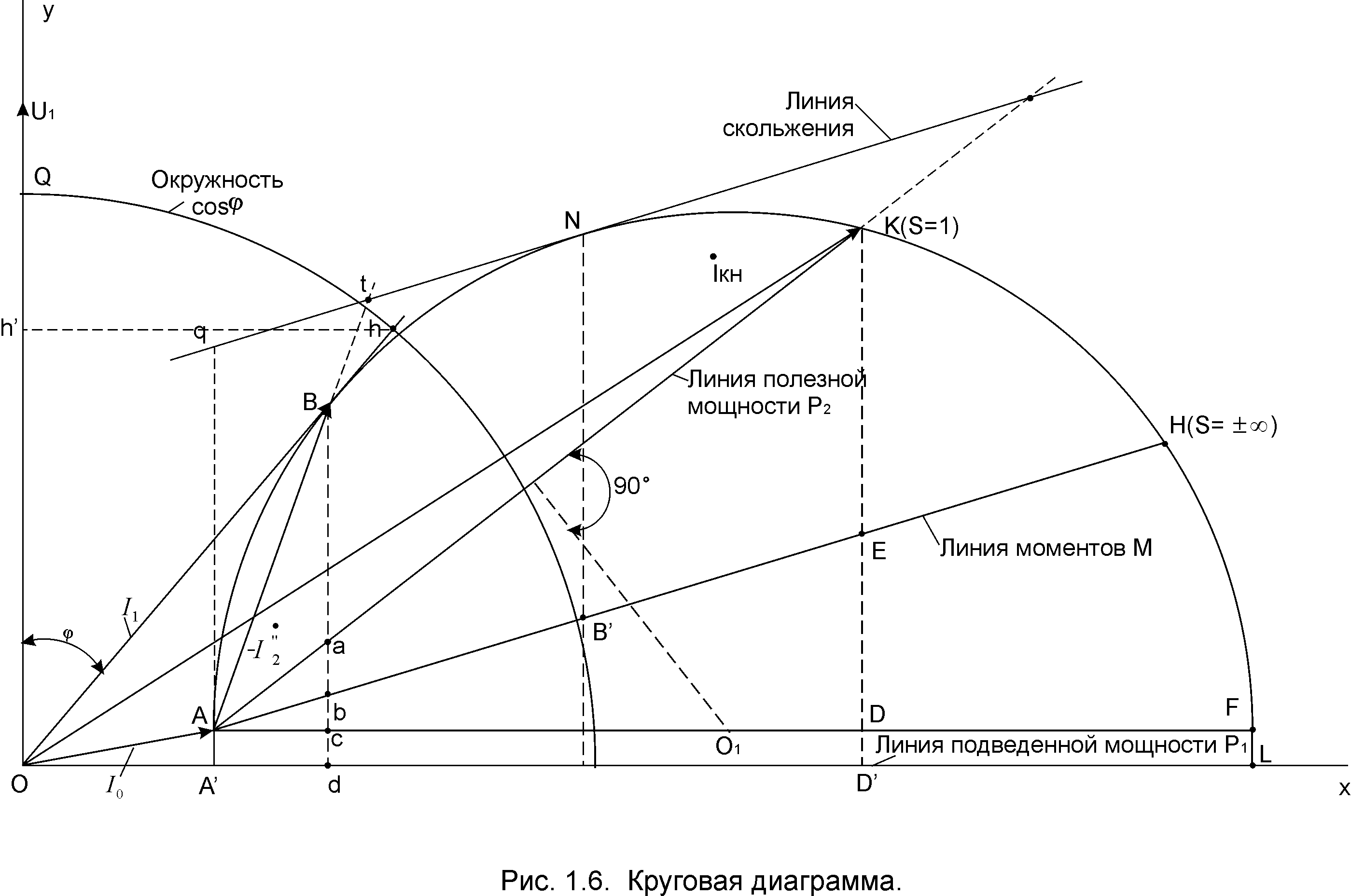
1.4 Вопросы для контроля готовности студента к проведению лабораторных исследований 1.4.1 Как определить экспериментально начала и концы фаз трехфазной обмотки? Как производится нумерация фаз и обозначаются выводы трехфазной обмотки статора? 1.4.2 Объяснить устройство и принцип действия асинхронного двигателя. С какой частотой вращается магнитное поле машины? Что такое скольжение? 1.4.3 Как производится пуск АД с ФР? Как осуществляется реверс АД? 1.4.4 Как определить из опыта величину скольжения? 1.4.5 Как проводится опыт холостого хода (ХХ)? 1.4.6 Как проводится опыт короткого замыкания (КЗ)? 1.4.7 Как снимаются механическая и скоростная характеристики? 1.5 Содержание отчета По лабораторной работе составляется отчет, в котором должны быть приведены: – программа лабораторных исследований; – паспортные данные исследуемого двигателя и основных измерительных приборов; – схемы и результаты опытов; – таблица и графики характеристик ХХ; – график для разделения суммы магнитных и механических потерь на составляющие; – таблица и графики характеристик КЗ; – графики механических и скоростных характеристик при двух значениях сопротивления пускового реостата (для студентов специальности 1801); – круговая диаграмма с построениями и вычислениями для определения показателей номинального режима. При составлении отчета могут быть использованы источники [1-5]. Отчет должен быть оформлен в соответствии с требованиями стандарта предприятия [6]. 1.6 Обработка данных испытаний 1.6.1 Построение характеристик холостого хода и короткого замыкания Характеристики холостого хода I0=f(U), P0 = f(U) и cos 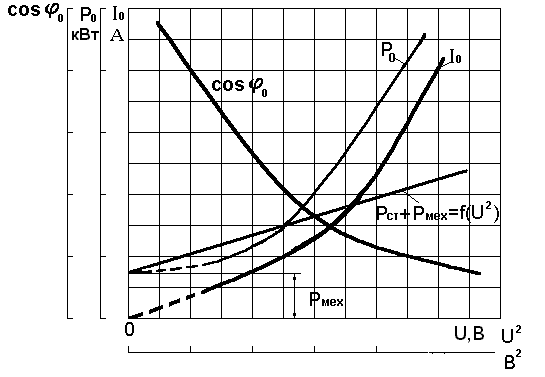 Рис.1.4 Характеристики холостого хода С помощью характеристики холостого хода можно определить составляющие потерь холостого хода. Для этого из общих потерь сначала надо вычесть электрические потери в обмотке статора PЭО=3I02г1 (r1-активное сопротивление фазной обмотки статора). В результате остается сумма механических потерь и потерь в стали P0 – PЭ0 = PМЕХ + PСТ. Поскольку при уменьшении напряжений PМЕХ = const, а PСТ ≡ U2, то экстраполируя кривую PМЕХ + PСТ = f(U) до пересечения с осью ординат (рис. 1.4), получим в точке пересечения величину PМЕХ. Значение PМЕХ более точно можно определить путем экстраполяции графика функции PСТ+PМЕХ=f(U2), так как график этой функции является прямой линией (рис.1.4). Характеристики короткого замыкания строятся по данным табл.1.2. Коэффициент мощности следует вычислить по формуле Сопротивления короткого замыкания при соединении фазных обмоток статора в звезду следует вычислить: Примерный вид характеристик короткого замыкания представлен на рис.1.5.       Р  ис.1.5 Характеристики короткого замыкания 1.6.2 Построение круговой диаграммы и рабочих характеристик Построение упрощенной круговой диаграммы для номинального напряжения производится по данным опытов холостого хода и короткого замыкания. Фазный ток холостого хода для U=UН. Активная и реактивная составляющие тока холостого хода: где UК и IК – значения напряжения и тока из опыта короткого замыкания. Активная и реактивная составляющие тока IКН: Построение круговой диаграммы производится следующим образом (рис.1.6): обозначают систему координат x, y, выбирают масштаб тока mi (А/мм) таким образом, чтобы IКН/mi=180–230 мм. По оси x откладывают отрезок OA’=I0P/mi и отрезок А’А=I0A/mi, перпендикулярно оси x. Отрезок ОА=I0/mi . Далее по оси x откладывается отрезок OD’=IKP/mi , а отрезок D’K=IKA/mi – перпендикулярно оси x. Далее соединяют точки А и К, и в середине отрезка АК восстанавливают перпендикуляр до пересечения в точке О1 с прямой AF, параллельной оси абсцисс и проходящей через точку А. Точка О1 является центром окружности токов. Окружность токов описывается радиусом, равным отрезку О1А. Далее из точки К следует опустить перпендикуляр на прямую AF. Отрезок KD разделить на две части (точка Е) пропорционально отношению сопротивлений В результате построения имеем: OL – линия потребляемой мощности P1 AH – линия электромагнитного момента M и электромагнитной мощности PЭМ AK – линия полезной мощности P2. Далее, на оси ординат y отложить отрезок OQ=100 мм и провести окружность cosφ с центром в точке О и радиусом OQ. Провести касательную к окружности токов, параллельную линии AH, и обозначить точку N, затем из точки А провести прямую Aq параллельно оси ординат до пересечения с касательной в точке q, линию ОК следует продлить до пересечения с той же касательной в точке l. Касательная qlназывается линией скольжения. Для определения данных рабочих характеристик I1, P1, cosφ, η , S, M=f(P2) следует на окружности токов отложить через равные отрезки точки B1, B2, … BK (k=5-6) (на дуге окружности ABN) и, опустив из них перпендикуляры на ось OX, определить данные рабочих характеристик для значений тока I1. Ниже описывается пример определения величин для точки В. Из точки В опустить перпендикуляр на OX и получить точки пересечения a, b, c, и d. Из точки О провести прямую через точку В до пересечения с полуокружностью cosφ в точке h, а из точки А провести прямую через точку В до пересечения с прямой qlв точке t. При помощи выполненных построений определяем: величину тока статора (А) подводимую мощность к двигателю (Вт) где масштаб мощности ( мощность на валу (Вт) КПД двигателя электромагнитный момент(Нм) где масштаб момента коэффициент мощности скольжение Все величины, определяемые по круговой диаграмме для всех точек (В1, В2, … Вк), записать в табл. 1.4, а затем построить рабочие характеристики (рис.1.7). Таблица 1.4
 Р  ис.1.7 Рабочие характеристики Для определения данных естественной механической характеристики необходимо продолжить определение значений момента и скольжения по круговой диаграмме до точки К (s = 1). По этим данным следует построить график механической характеристики M=f(s). Значения максимального и пускового моментов (Нм) определяются по формулам: Перегрузочная способность исследуемого двигателя определяется из отношения где номинальный момент (Нм) значения PH (кВт) и n (мин-1) берутся из паспортных данных испытываемого двигателя. Значения тока статора, коэффициента мощности, КПД и момента для номинального режима (P2=PН) определить из графика рабочих характеристик. 1.7 Вопросы для самоконтроля 1.7.1 Дайте описание конструкции испытываемого асинхронного двигателя. 1.7.2 Объясните условия создания вращающего магнитного поля в асинхронном двигателе. 1.7.3 Объясните принцип действия трёхфазного асинхронного двигателя. 1.7.4 Как осуществляется реверс асинхронного двигателя? 1.7.5 Как снимаются характеристики холостого хода и короткого замыкания асинхронного двигателя с контактными кольцами? 1.7.6 Как определяются из опыта холостого хода механические потери двигателя и потери стали? 1.7.7 Поясните построение круговой диаграммы асинхронного двигателя по опытам холостого хода и короткого замыкания. 1.7.8 Определите по круговой диаграмме перегрузочную способность двигателя по моменту. 1.7.9 Найдите по круговой диаграмме максимальный коэффициент мощности асинхронного двигателя. 1.7.10 Определите по круговой диаграмме скольжение двигателя при номинальной мощности на валу и критическое скольжение. 1.7.11 Определите по круговой диаграмме пусковой ток и пусковой момент. 1.7.12 Нарисуйте механическую характеристику асинхронного двигателя. Покажите на ней номинальный и пусковой моменты. 1.7.13 Что такое скольжение? Как оно определяется опытным путём? 1.7.14 Как влияет величина активного сопротивления обмотки ротора на вид механической характеристики? 1.7.15 С какой целью во время эксплуатации двигателя регулируется активное сопротивление, включаемое в обмотку ротора? Почему в тех же целях не применяется индуктивное сопротивление? 1.7.16 Как изменяется частота тока в роторе при изменении скольжения? 1.7.17 Как изменяется ЭДС и ток в обмотке ротора при изменении скольжения? 1.7.18 Каким образом можно изменить скольжение во время работы двигателя? 1.7.19 Почему асинхронный двигатель во время работы потребляет реактивный ток? 1.7.20 Почему увеличение скольжения снижает коэффициент полезного действия двигателя? Лабораторная работа № 2 ИССЛЕДОВАНИЕ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ 2.1. Цель работы Ознакомиться с конструкцией, схемами включения, способами пуска в ход трехфазных асинхронных электродвигателей с короткозамкнутым ротором, рабочими характеристиками двигателя и их получением методом непосредственной нагрузки . 2.2 Программа лабораторных исследований 2.2.1 Ознакомиться с конструкцией и номинальными данными исследуемого двигателя. 2.2.2 Ознакомиться с электрической схемой, конструкцией лабораторного стенда, собрать схему исследований. 2.2.3 Провести пуск двигателя в ход: - включением в сеть; - с помощью реакторов, включенных в цепь статорных обмоток; - переключением обмоток статора со звезды на треугольник. 2.2.4 Снять рабочие характеристики двигателя при соединении обмоток: - в звезду; - в треугольник. 2.2.5 Оформить отчет по лабораторной работе и подготовить ответы на контрольные вопросы. 2.3 Пояснения и указания к работе Принцип работы асинхронного двигателя описан в учебниках [1-3]. В двигателе с короткозамкнутым ротором обмотка ротора чаще всего представляет собой литую или сварную «беличью клетку». Короткозамкнутая обмотка ротора не позволяет применить способ пуска, используемый в двигателях с фазным ротором (введение дополнительного сопротивления в цепь обмотки ротора). При прямом пуске статорная обмотка включается в сеть номинального напряжения и пусковой ток может превысить номинальный ток в 5-7,5 раза. В ряде случаев такая перегрузка для питающей сети недопустима. В данной работе предусматривается пуск двигателя включением реакторов Р последовательно в цепь каждой фазы и переключением « звезда - треугольник ». Если в номинальном режиме фазные обмотки статора двигателя соединены в треугольник, то уменьшить пусковой ток можно, соединив их на время пуска в звезду. Линейный ток двигателя при таком пуске уменьшается в три раза. При достижении установившегося значения частоты вращения ротора обмотки статора переключаются в треугольник. Тормозной момент на валу двигателя (нагрузка) регулируется с помощью электромагнитного тормоза. При изменении нагрузки изменяются все параметры режима работы двигателя: потребляемая мощность, ток статора, частота вращения ротора, коэффициент мощности, КПД. Величина нагрузочного момента отсчитывается с помощью стрелки, соединенной с качающимся статором тормоза. Лабораторный стенд для исследования двигателя устроен следующим образом. На общей раме установлен двигатель и электромагнитный тормоз. Валы двигателя и тормоза соединены с помощью муфты. На пульте управления расположены: коммутационное поле для сборки схемы, электроизмерительные приборы, аппаратура управления двигателем и электромагнитным тормозом. Схема исследования двигателя приведена на рис. 2.1. 2.4 Испытания и измерения 2.4.1 Пуск двигателя Применение пуска по схеме « звезда - треугольник » позволяет снизить линейный пусковой ток в три раза. Инерционность установленных на стенде приборов не позволяет с необходимой точностью измерять броски тока. Поэтому в настоящей работе достаточно экспериментально установить качественное снижение пускового тока при использовании данного способа пуска. После сборки схемы и проверки её преподавателем переключатели S2, S3 установить в такие положения, чтобы получить исследуемый способ пуска, а затем подать напряжение на обмотку статора с помощью пускателя S1 и произвести измерение пускового тока. Записать показания амперметра А для трех пусковых способов.  2 .4.2 Снятие рабочих характеристик Под рабочими характеристиками асинхронного двигателя понимают зависимости P1, I1, , cos, n, M=f(P2) при U1=const, f1=const. Порядок снятия рабочих характеристик следующий. Запустить двигатель. Включить питание ЛАТРа и, плавно увеличивая ток возбуждения тормоза, установить наибольшую нагрузку двигателя в опыте, соответствующую току статора ( I, 1 - 1.2 ) Iн, где величина Iн берётся для принятой схемы соединения обмотки статора. Затем, разгружая двигатель уменьшением тока возбуждения тормоза в интервале от наибольшей нагрузки до холостого хода включительно, произвести измерение всех необходимых величин при 6 значениях момента нагрузки через примерно равные его интервалы и записать их в табл.2.1 Таблица 2.1
C целью анализа рабочих характеристик при разных схемах соединений заполнить табл.2.2, используя значения, определенных из графических зависимостей рис. 2.2. Таблица 2.2
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||