Курсовой по Соколову. Исследование динамических процессов работы привода
 Скачать 1.1 Mb. Скачать 1.1 Mb.
|

|
1.7 Выбор шунта в цепи якоря Шунт в цепи якоря выбираем из условия, чтобы его номинальный ток был не меньше номинального тока двигателя и по возможности ближе к нему. Принимая во внимание то, что двигатель выбран с запасом и не загружен на 100%, выбираем шунт серии ШСМ на 500А [3, с.6]. Технические данные шунта приведены в таблице 5. Таблица 5 - Технические данные шунта ШСМ
1.8 Выбор шунта в цепи возбуждения Шунт в цепи обмотки возбуждения выбирается из условия, чтобы его номинальный ток был не меньше номинального обмотки возбуждения и по возможности ближе к нему. Расчет параметров обмотки возбуждения будет произведен в третьем пункте этого курсового проекта. На основе расчета будет выбран шунт. 1.9 Выбор задатчика скорости В качестве задатчика скорости в системе, с обратной связью по скорости и имеющей не большой диапазон регулирования D=1:40 следует выбрать линейный вариатор типа 13П2Н1В, его схема представлена на рисунке 1. Примем суммарное сопротивление задатчика Где Nст=13 – число ступеней регулирования. 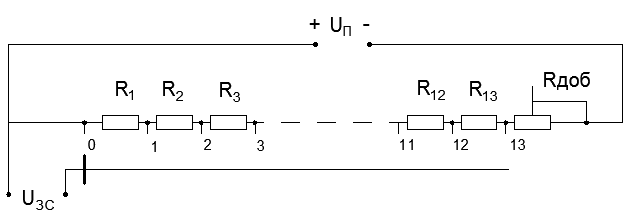 Рисунок 1 - Задатчик скорости 2 ФУНКЦИОНАЛЬНАЯ СХЕМА ЭЛЕКТРОПРИВОДА Функциональная схема тиристорного электропривода на базе ЭПУ1М-2-4624М приведена на рисунке 2. Система регулирования выполнена двухконтурной с ПИ–регуляторами скорости РС и тока РТ. В целом система регулирования выполнена однозонной, однако, источник питания обмотки возбуждения выполнен регулируемым, что позволяет стабилизировать ток возбуждения. Датчики тока якоря (ДТЯ) и возбуждения (ДТВ) построены на базе трансформаторов тока и неуправляемых выпрямителей. Однако, датчик тока якоря позволяет изменять знак сигнала в соответствии со знаком сигнала задания на скорость. Датчик скорости (ДС) построен на базе тахогенератора с возбуждением от постоянных магнитов. На вход регулятора скорости (РС) поступает сигнал с задатчика скорости UЗС, а также сигнал обратной связи по скорости UДС. На выходе РС формируется сигнал UРС, пропорциональный разности входных сигналов. Сигнал UРС, в свою очередь, является задающим для внутреннего контура регулирования тока. На вход регулятора тока (РТ), помимо задающего, поступает также сигнал обратной связи по току UДТ. На выходе РТ формируется сигнал UРТ, пропорциональный разности входных сигналов. В данной системе электропривода организованы две ступени ограничения тока якоря. Первая - за счет контура тока, путем ограничения максимального задания UРСmax, чем обеспечивается ограничение максимального значения тока якоря. Вторая - за счет «токовой стенки» и ограничения сигнала UРТmax. При подаче сигнала задания на скорость на вход РС появляется сигнал задания на ток, задавая выходное напряжение преобразователя. В силовой цепи начинает протекать ток и двигатель начинает разгоняться.По мере увеличения скорости ток якоря остается неизменным. При этом сигнал отрицательной обратной связи по скорости растет, уменьшая рассогласование на входе РС. Процесс продолжается пока сигнал тахогенератора не сравняется с сигналом задания на скорость, тогда на выходах РС и РТ будут нули, ток якоря станет равным нулю, система будет находится в установившемся режиме. При набросе нагрузки момент сопротивления становится больше момента двигателя, и привод начинает замедляться.Уменьшается сигнал датчика скорости, соответственно увеличиваются ошибка на входе и сигнал регулятора скорости. На входе PТ появится рассогласование, на выходе контура тока появляется сигнал и ток якоря увеличится. Скорость при этом начнёт возрастать до заданного значения, а ток уменьшаться до значения, при котором момент, развиваемый двигателем, станет равным статическому. После этого привод работает в установившемся режиме с заданной скоростью. 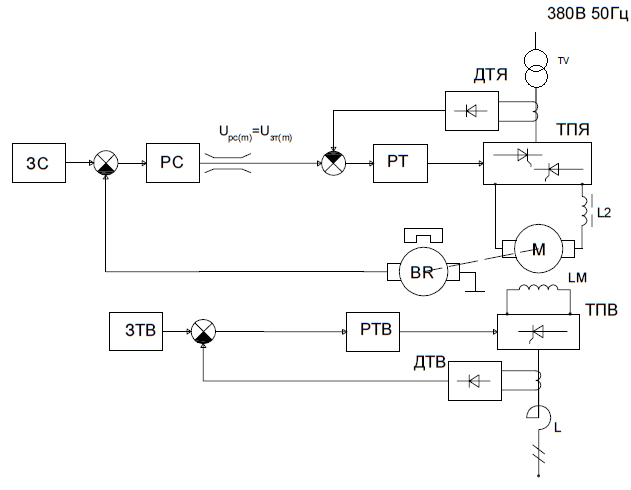 Рисунок 2 - Функциональная схема электропривода 3 РАСЧЕТ ПАРАМЕТРОВ СИЛОВОЙ ЦЕПИ ЭЛЕКТРОПРИВОДА Падение напряжения на щеточном контакте: Номинальная угловая скорость Сопротивление якорной цепи электродвигателя: где Номинальная ЭДС электродвигателя: Конструктивный коэффициент электродвигателя: Коэффициент ЭДС и момента электродвигателя: Номинальный поток: Сопротивление обмотки возбуждения при температуре 80 С: Номинальный ток возбуждения: Коэффициент наклона кривой намагничивания при где 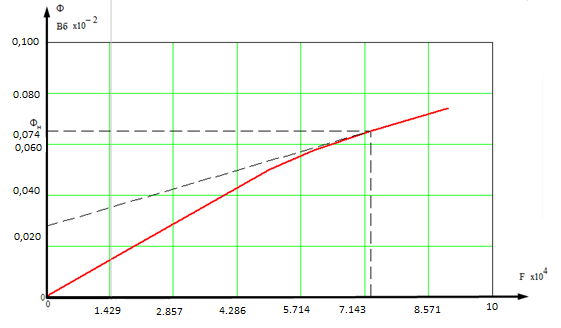 Рисунок 3 - Кривая намагничивания двигателя П132 Индуктивность обмотки возбуждения:  , (3.10) , (3.10) где Электромагнитная постоянная времени цепи возбуждения: Постоянная времени контура вихревых токов: Индуктивность якоря двигателя: где с = 0,1 для компенсированных машин. Электромагнитная постоянная времени якоря двигателя: Момент инерции двигателя: Момент инерции механизма, приведенный к валу электродвигателя: Момент инерции привода: Номинальный момент двигателя: Максимальное ускорение электродвигателя при пуске от задатчикаинтенсивности: Приведенное к цепи выпрямленного тока сопротивление трансформатора:  (Ом). (3.20) (Ом). (3.20)Максимальная выпрямленная ЭДС преобразователя цепи якоря: где Максимальная выпрямленная ЭДС преобразователя цепи обмотки возбуждения: где Индуктивное сопротивление трансформатора, приведенное к цепи вторичной обмотки: где Эквивалентное сопротивление реактора, учитывающее снижение выпрямленного напряжения при коммутации вентилей: Сопротивление сглаживающего дросселя:  (Ом). (3.25) (Ом). (3.25) Сопротивление шин и кабелей: Сопротивление цепи тиристорный преобразователь – электродвигатель (ТП–Д): Индуктивность рассеяния трансформатора: где Индуктивность цепи ТП–Д: Максимальное значение коэффициента усиления тиристорного преобразователя цепи якоря с системой СИФУ: где Значение коэффициента усиления ТП в цепи обмотки возбуждения с СИФУ, выполненной по вертикальному принципу управления с пилообразным напряжением сравнения:  . (3.31) . (3.31)Электромагнитная постоянная времени цепи ТП–Д: Электромеханическая постоянная времени: Коэффициент передачи шунта в цепи якоря: Коэффициент передачи датчика тока якоря: где Imax = 2,5·Iн = 962,5(А) - максимальный ток якоря двигателя. Передаточный коэффициент усилителя датчика тока якоря: Шунт в цепь обмотки возбуждения выбирается на ток больше или равным номинальному току обмотки возбуждения. Выбираем шунт ШСМ на 15 А. Его характеристики представлены в таблице 7. Таблица 7 - Технические данные шунта ШСМ
По данным находим коэффициент шунта в цепи обмотки возбуждения: Коэффициент передачи датчика тока возбуждения: где Коэффициент усилителя датчика тока возбуждения: Передаточный коэффициент тахогенератора: Некомпенсированные постоянные времени контуров тока якоря и тока возбуждения принимаем равными 5. ОПТИМИЗАЦИЯ КОНТУРОВ РЕГУЛИРОВАНИЯ На рисунке 4 представлена полная структурная схема электропривода. 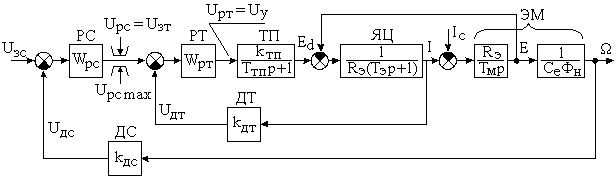 Рисунок 4 - Полная структурная схема электропривода Рисунок 4 - Полная структурная схема электропривода5.1 Оптимизация контура тока якоря и расчет решающих цепей 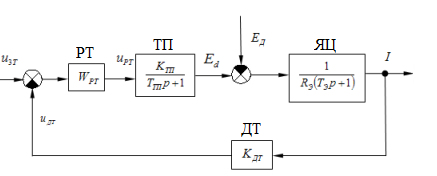 Рисунок 5 - Структурная схема контура тока якоря На рисунке 5представлена структурная схема контура тока. Её составляющие: - РТ - регулятор тока; - ТП - тиристорный преобразователь тока якоря; - ЯЦ - якорная цепь; - ДТ - датчик тока. Для расчета необходимо сделать следующие допущения: - датчик тока считаем безынерционным; - все малые постоянные времени включены в тиристорный преобразователь: - двигатель заторможен (E = 0), а значит отсутствует ОС по ЭДС. С учетом сделанных допущений структурная схема контура тока якоря представлена на рисунке 6. 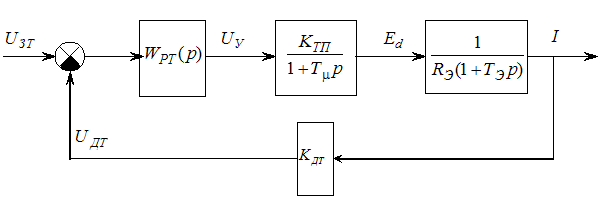 Рисунок 6 - Структурная схема контура тока якоря с допущениями Оптимизируем контур тока на модульный оптимум (МО). Передаточная функция разомкнутого контура тока: где Передаточная функция регулятора тока: где Получили пропорционально-интегральный регулятор тока. С этим регулятором система астатична по заданию и по возмущению. Передаточная функция замкнутого контура тока:  ,(5.5) ,(5.5)где Считая величину  (5.6) (5.6)где Произведем расчет решающих цепей регулятора тока с датчиком тока на базе шунта. Схема контура тока на базе шунта представлена на рисунке 7. 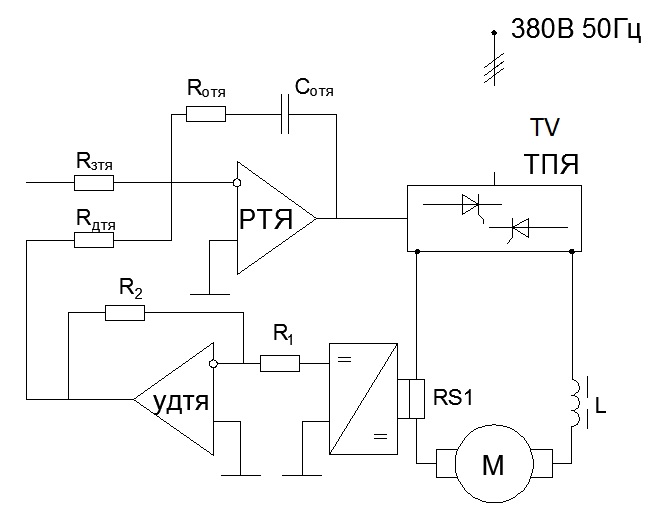  Рисунок 7 - Схема контура тока якоря с датчиком тока на базе шунта По формуле (5.4) рассчитаем коэффициент регулятора тока: Ёмкость конденсатора в цепи обратной связи регулятора тока якоря: Сопротивление резистора в цепи обратной связи регулятора тока якоря: Сопротивление резистора в цепи датчика тока: Условие установившегося режима: где Принимая Примем R1 = 5 (кОм), тогда Рассчитаем параметры решающих цепей регулятора тока якоря с датчиком тока на базе трансформаторов переменного тока. Схема контура тока якоря с датчиком тока на базе трансформаторов переменного тока представлена на рисунке 8. 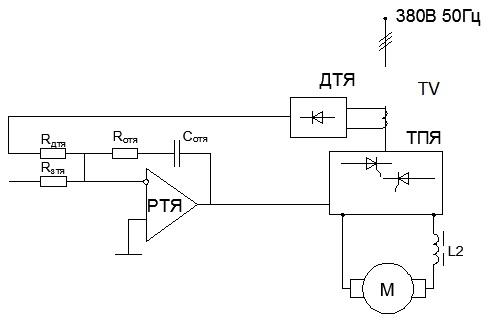  Рисунок 8 - Схема контура тока якоря с датчиком тока на базе трансформаторапеременного тока Коэффициент датчика тока согласно заданию на КП:  (5.12) (5.12)где Максимальное выходное напряжение датчика тока: Сопротивление в цепи задания тока: Передаточная функция замкнутого контура тока якоря с датчиком тока на базе трансформатора переменного тока:  . (5.15) . (5.15) |