Курсовой по Соколову. Исследование динамических процессов работы привода
 Скачать 1.1 Mb. Скачать 1.1 Mb.
|

|
5.2 Оптимизация контура скорости и расчет решающих цепей 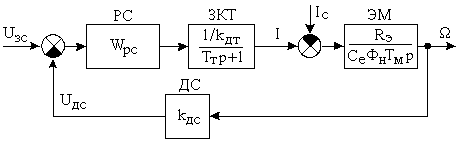 Рисунок 9 - Структурная схема контура скорости На рисунке 9 представлена схема контура скорости. Её составляющие: - РС - регулятор скорости; - ЗКТ - замкнутый контур тока; - ЭМ - электромеханическая часть; - ДС - датчик скорости. По заданию контур скорости должен быть с П-регулятором, то есть двукратно интегрирующий. Следовательно, настройку необходимо делать на модульный оптимум (МО). Передаточная функция разомкнутого контура скорости при настройке на МО:  (5.16) (5.16)Передаточная функция регулятора скорости: где Передаточная функция замкнутого контура скорости:   (5.19) (5.19)Передаточная функция оптимизированного на МО замкнутого контура скорости с фильтром на входе: где Произведем расчет решающих цепей контура скорости. Схема контура скорости представлена на рисунке 10. Скорость холостого хода двигателя: Коэффициент передачи датчика скорости: Коэффициент усиления регулятора скорости найдем по формуле (5.18): Примем резистор в цепи обратной связи регулятора скорости Сопротивление в цепи датчика скорости: Условие установившегося режима: где Принимая Коэффициент делителя: Величину сопротивления R4принимаем: R4 = 1(кОм). Тогда величину сопротивления R3 находим как: Напряжение стабилизации стабилитронов: где Согласно пункту 1.9 данной курсовой работы суммарное сопротивление задатчика скорости 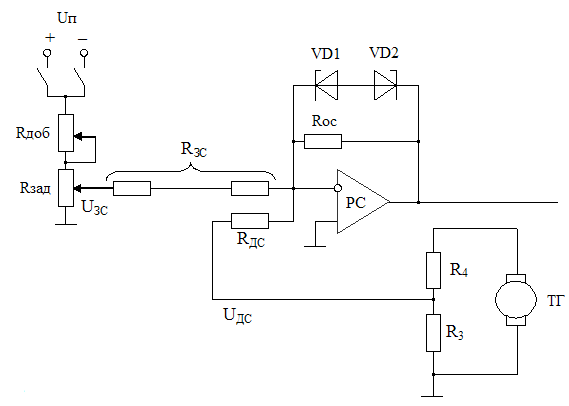 Рисунок 10 - Схема контура скорости. 6 ОЦЕНКА ВЛИЯНИЯ ВНУТРЕННЕЙ ОС ПО ЭДС Структурная схема контура тока с учетом влияния внутренней обратной связи по ЭДС представлена на рисунке 14. 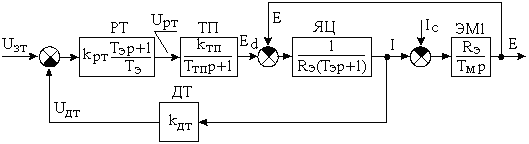 Рисунок 14 - Структурная схема контура тока с учетом влияния внутренней обратной связи по ЭДС. Рассмотрим влияние внутренней обратной связи по ЭДС при отсутствии нагрузки на валу.Передаточная функция звена якорной цепи с учетом влияния внутренней обратной связи по ЭДС:  Передаточная функция якорной цепи обладает дифференцирующими свойствами, благодаря чему компенсируются интегральные свойства регулятора. Передаточная функция разомкнутого контура тока с учетом действия внутренней обратной связи по ЭДС: Определим передаточную функцию замкнутого контура тока с учетом действия внутренней обратной связи по ЭДС:   . (6.3) . (6.3)Напряжение задания на номинальный ток: Для поиска установившегося значения тока применим теорему об установившемся значении оригинала:   (А). (6.5) (А). (6.5)Проведем моделирование переходных процессов в ПО SamSim. Схема контура тока с учетом влияния внутренней обратной связи по ЭДС представлена на рисунке 16. 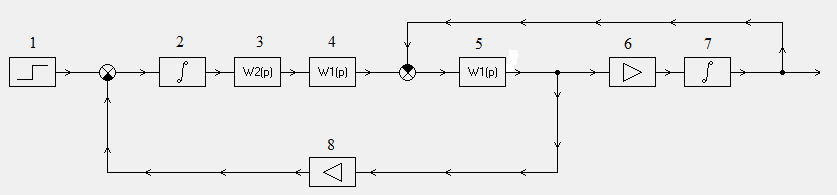 Рисунок 15 - Схема контура тока с учетом действия внутренней ОС по ЭДС Состав схемы: - 1 - источник ступенчатого сигнала; - 2,3 - регулятор тока; - 4 - тиристорный преобразователь тока якоря; - 5 - якорная цепь электродвигателя; - 6,7 - электромеханическая часть; - 8 - датчик тока якоря(на базе шунта). Параметры звеньев: 1) Источник ступенчатого сигнала. Высота ступеньки 5. 2) Интегрирующие звено. Передаточная функция: 3) Форсирующее звено первого порядка. Передаточная функция: 4) Апериодическое звено первого порядка. Передаточная функция: 5) Апериодическое звено первого порядка. Передаточная функция:  . (6.13) . (6.13)6) Пропорциональное звено. Передаточная функция: 7) Инегрирующие звено. Передаточная функция: 8) Пропорциональное звено. Передаточная функция: Получившийся переходный процесс представлен на рисунке 17. Рисунок 17 - Осциллограмма тока при отработке сигнала задающего воздействия с учетом влияния внутренней ОС по ЭДС 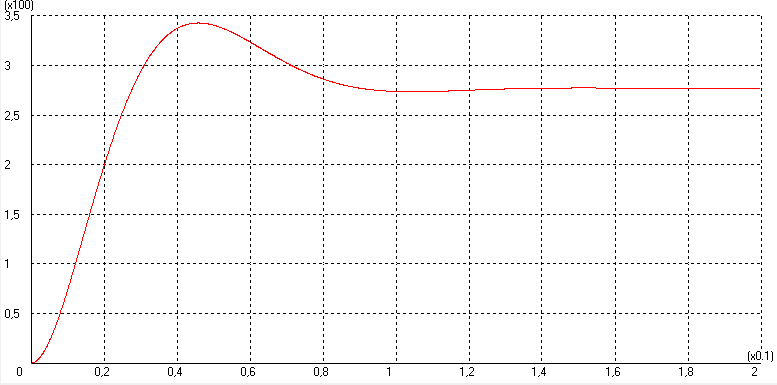 Схема контура тока без учета влияния внутренней обратной связи по ЭДС представлена на рисунке 18. 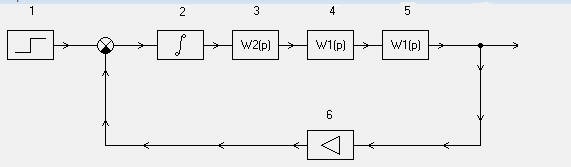 Рисунок 18 - Схема контура тока при заторможенном двигателе Состав схемы: - 1 - источник ступенчатого сигнала; - 2,3 - регулятор тока; - 4 - тиристорный преобразователь тока якоря; - 5 - якорная цепь электродвигателя; - 6 - датчик тока якоря(на базе шунта). Параметры звеньев: 1) Источник ступенчатого сигнала. Высота ступеньки 4. 2) Интегрирующие звено. Передаточная функция: 3) Форсирующее звено первого порядка. Передаточная функция: 4) Апериодическое звено первого порядка. Передаточная функция: 5) Апериодическое звено первого порядка. Передаточная функция: . (6.20)6) Пропорциональное звено. Передаточная функция: Осциллограмма представлена на рисунке 19. 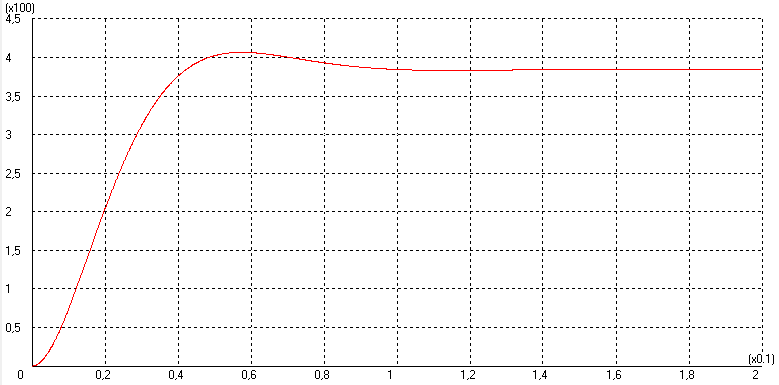 Рисунок 19 - Осциллограмма тока при отработке сигнала задающего воздействия при заторможенном двигателе Результаты моделирования в ПО SamSim подтверждают результаты, полученные с помощью преобразования Лапласа. По результатам видно, что при одинаковом задающем сигнале, на выходе контура тока с учетом внутренней обратной связи по ЭДС появляется ошибка регулирования. То есть контур, который при расторможенном роторе был статичным, становится астатичным при заторможенном роторе. 7 РАСЧЕТ И ПОСТРОЕНИЕ СКОРОСТНЫХ ХАРАКТЕРИСТИК Скоростные характеристики однозонного тиристорного электропривода с П-регулятором скорости при Uзс = 10В представляют собой прямые линии, выходящие из точки идеального холостого хода Выражение для расчета характеристик имеет вид: где Скорость идеального холостого хода: Падение скорости на естественной характеристике: Выражение для естественной характеристики: Падение скорости на естественной характеристике при номинальной нагрузке: Статизм естественной характеристики: Падение скорости в разомкнутой системе: Выражение для разомкнутой системы: Падение скорости в разомкнутой системе при номинальной нагрузке: Статизм разомкнутой системы: Падение скорости в замкнутой системе: Выражение для замкнутой системы: Падение скорости в замкнутой при номинальной нагрузке: Статизм замкнутой системы: Построение характеристик дляUзс = 4В ( Скорость холостого хода: Выражение для разомкнутой системы: Статизм разомкнутой системы: Выражение для замкнутой системы: Статизм замкнутой системы: Полученные характеристики изображены на рисунке 20. 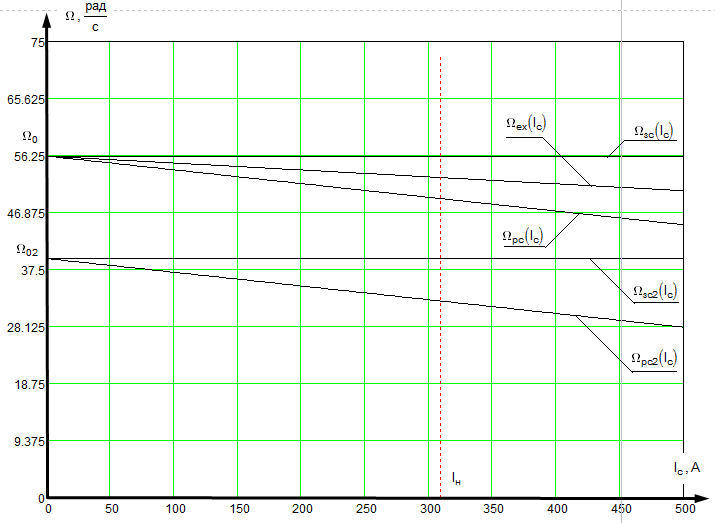 Рисунок 20 - Скоростные характеристики электропривода По результатам можно отметить, что характеристика замкнутой системы абсолютно жёсткая и позволяет реализовать больший диапазон регулирования скорости. 8 РАСЧЕТ ДИНАМИЧЕСКОГО ПАДЕНИЯ И ОСЦИЛЛОГРАММЫ СКОРОСТИ Для расчета динамического падения скорости используем аппарат передаточных функций. Передаточная функция скорости по возмущению (см. рисунок 9):   . (8.1) . (8.1)Переходный процесс динамического падения скорости при набросе номинальной нагрузки Ic = Iн можно получить с помощью обратного преобразования Лапласа: 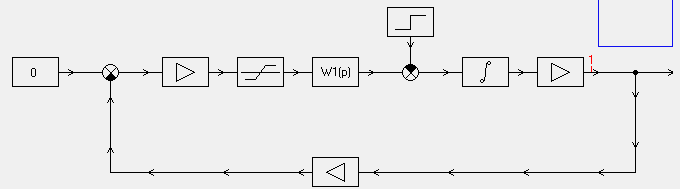 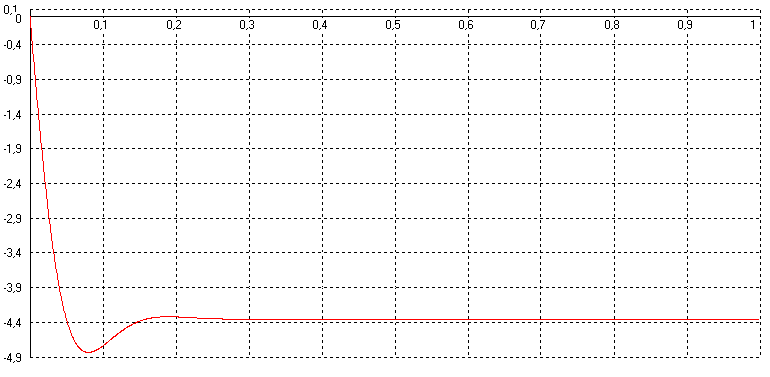 Рисунок 21 - Осциллограмма скорости при набросе нагрузки График переходного процесса изображен на рисунке 21. Проведем моделирование наброса нагрузки в ПО SamSim. Схема представлена на рисунке 22.  Рисунок 22 - Схема контура скорости в SamSim Состав схемы: - 1 - нулевой сигнал; - 2, 3 - регулятор скорости; - 4 - замкнутый контур тока; - 5 - сигнал нагрузки (Iс); - 6 - электромеханическая часть; - 7 - датчик скорости. Параметры звеньев: 1) Нулевой сигнал. 2) Инерционное звено. Передаточная функция: 3) Форсирующее звено первого порядка. Передаточная функция: 4) Апериодическое звено первого порядка. Передаточная функция:  . (8.5) . (8.5)5) Сигнал возмущения. Высота ступеньки 27,6 6) Инерционное звено. Передаточная функция: 7) Пропорциональное звено. Передаточная функция: На рисунке 23 представлена осциллограмма скорости при набросе нагрузки при нулевом задании. 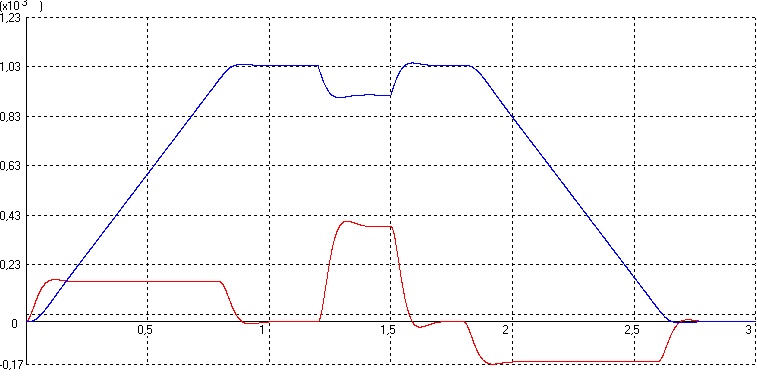 Рисунок 23 - Осциллограмма скорости при набросе нагрузки в ПОSamSim По результатам видно, что посадка скорости в установившемся режиме в системе, оптимизированной на симметричный оптимум, равна нулю. |