лр3. 1 лр. Исследование разомкнутой линейной системы
 Скачать 323 Kb. Скачать 323 Kb.
|

|
Лабораторная работа №1 Тема: Исследование разомкнутой линейной системы Вариант11  1.Описание системы Исследуется система, описываемая математической моделью в виде передаточной функции F(s)= 2 s^2 + 0.6 s - 0.36 --------------------------------- s^3 + 1.2 s^2 + 0.7406 s + 0.2734 2. Результаты исследования -адрес файла tf.m: C:\Program Files\MATLAB\R2009b\toolbox\control\control\@tf\tf.m % tf constructor -нули передаточной функции z = -0.6000 0.3000 -полюса передаточной функции p = -0.7000 -0.2500 + 0.5728i -0.2500 - 0.5728i -коэффициент усиления звена в установившемся режиме k = -1.3168 -полоса пропускаемой системы b = 2.2532 -модель системы в пространстве состояний a = x1 x2 x3 x1 -1.2 -0.7406 -0.5468 x2 1 0 0 x3 0 0.5 0 b = u1 x1 2 x2 0 x3 0 c = x1 x2 x3 y1 1 0.3 -0.36 d = u1 y1 0 -статический коэффициент усиления после изменения матрицы D k1 = -1.3168 Связь между к и к1 объясняется тем что……. -модель в форме «нули-полюса» 2 (s+0.6) (s-0.3) ----------------------------- (s+0.7) (s^2 + 0.5s + 0.3906) -коэффициенты демпфирования и частоты среза wc = 0.6250 0.6250 0.7000; ksi = 0.4000 0.4000 1.0000; p = -0.2500 + 0.5728i -0.2500 - 0.5728i -0.7000 . -импульсные характеристики получились одинаковые потому что…….. -переходные процессы исходной и модифицированной системы -амплитудная частотная характеристика  -для того ,чтобы найти статический коэффициент усиления по АХЧ, надо……….. - для того ,чтобы найти полосу пропускания по АХЧ,надо…. -реакция на сигнал, состоящий из прямоугольный импульсов  Лабораторная работа №2 Тема: Проектирование регулятора для линейной системы Вариант 11  Описание системы Движение судна описывается линейной математической моделью в виде передаточной функции  ,где к=0,08рад/сек, Ts=18,0сек, ,где к=0,08рад/сек, Ts=18,0сек,Привод моделируется как интегрирующее звено  Tr=1сек, Tr=1сек,Охваченное единичной отрицательной обратной связью. Модель измерительного устройства представляет собой апериодическое звено с передаточной функцией  Tос=5сек Tос=5секИсследование разомкнутой системы -Передаточная функция рулевого устройства  -Передаточная функция последовательного соединения объекта с приводом  -ЛАФЧХ разомкнутой системы 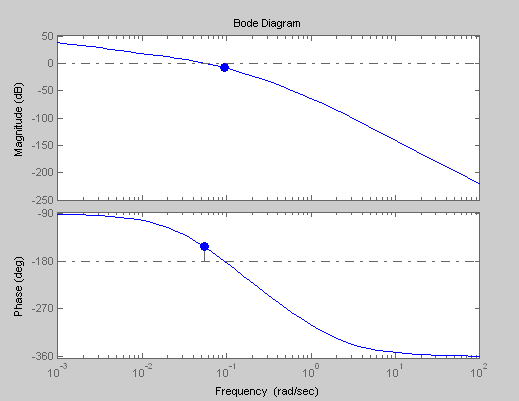 Исследование системы с пропорциональным регулятором -Переходная функция замкнутой системы 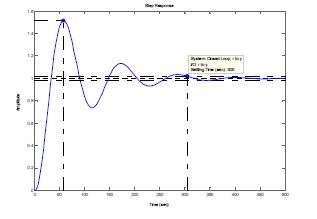 -Для обеспечения перерегулирования не более 10% требуется уменьшить коэффициент регулятора до значения C(s)= 0.33826 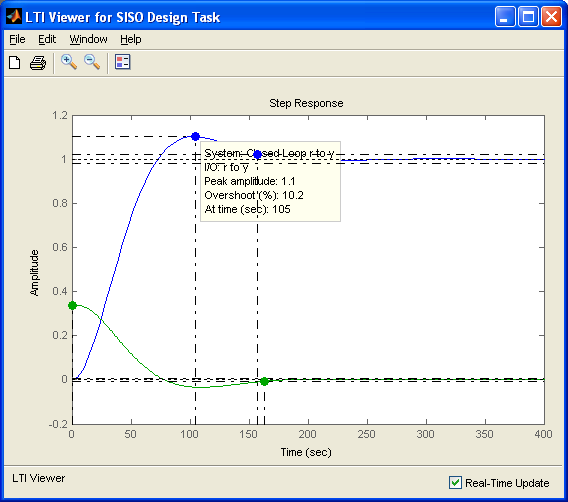 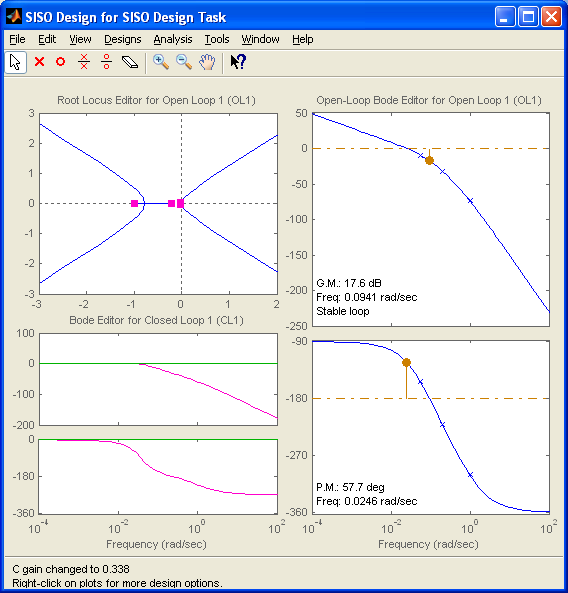 4. Исследование системы с пропорционально-дифференциальным(ПД-) 4.1 Регулятор ,обеспечивающий перерегулирование 10% -Для обеспечения перерегулирования 10% требуется выбрать Кс=1.0578 -Переходная функция скорректированной замкнутой системы 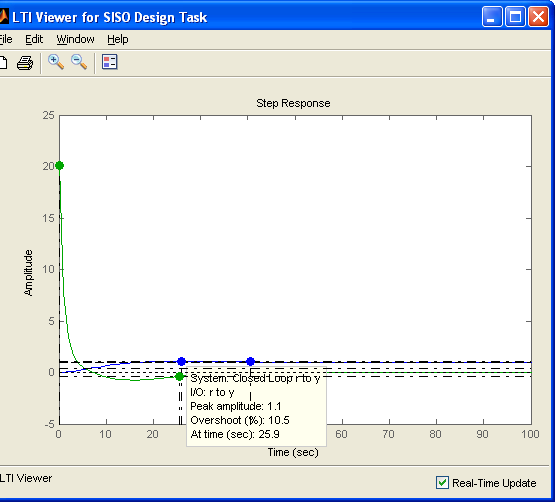 Дополнительный коэффициент усиления равен 1.0578 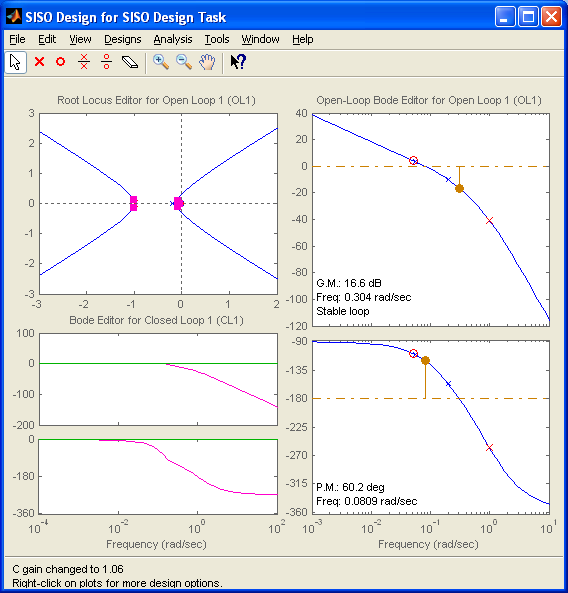 Время=25.9 Запасы устойчивости из графика = 16,6дБ, 60,2гр 4.2 Регулятор, обеспечивающий кратчайший переходный процесс -Для обеспечения минимального времени переходного процесса требуется выбрать К=0,704Переходная функция скорректированной системы 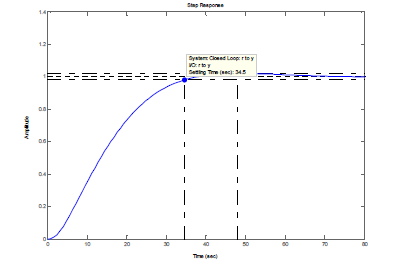 -Передаточная функция замкнутой системы 0.089327 s (s+0.05263) (s+0.05556) (s+0.2) (s+1)^2 -------------------------------------------------------------- s (s+1)^2 (s+0.05556) (s+0.05082) (s^2 + 0.1601s + 0.01737) -Полюса передаточной функции ans = -1.0223 + 0.1425i -1.0223 - 0.1425i -0.0801 + 0.1047i -0.0801 - 0.1047i -0.0508 -Передаточная функция замкнутой системы от входа к сигналу управления 20.0986 s (s+0.05263) (s+0.05556) (s+0.2) (s+1) ------------------------------------------------------------ (s+0.05082) (s^2 + 0.1601s + 0.01737) (s^2 + 2.045s + 1.065) -Изменение сигнала управления при единичном ступенчатом входном сигнале 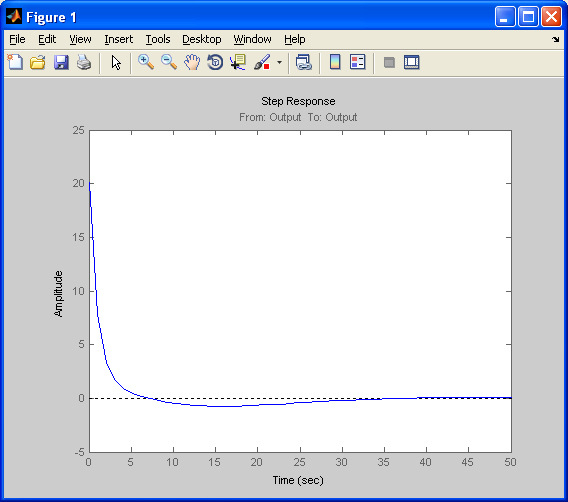 5. Код программы 1)p=tf(0.08,[18.0 1 0]) Transfer function: 0.08 ---------- 18 s^2 + s 2)R0=tf(1,[1 0]) Transfer function: 1 - s 3) R=feedback(R0,1) Transfer function: 1 ----- s + 1 4) G=p*R Transfer function: 0.08 ------------------- 18 s^3 + 19 s^2 + s 5) step(G) 6) H=tf(1,[5 1]) Transfer function: 1 ------- 5 s + 1 7) L=G*H Transfer function: 0.08 ----------------------------- 90 s^4 + 113 s^3 + 24 s^2 + s 8) bode(L) 9)cpd=1+tf([18 0],[1 1]) Transfer function: 19 s + 1 -------- s + 1 10)w=c*G/(1+c*G*H) Zero/pole/gain from input "Output" to output "Output": 0.089327 s (s+0.05263) (s+0.05556) (s+0.2) (s+1)^2 -------------------------------------------------------------- s (s+1)^2 (s+0.05556) (s+0.05082) (s^2 + 0.1601s + 0.01737) (s^2 + 2.045s + 1.065) 11) w=minreal(w) Zero/pole/gain from input "Output" to output "Output": 0.089327 (s+0.05263) (s+0.2) ------------------------------------------------------------ (s+0.05082) (s^2 + 0.1601s + 0.01737) (s^2 + 2.045s + 1.065) 12)pole(w) ans = -1.0223 + 0.1425i -1.0223 - 0.1425i -0.0801 + 0.1047i -0.0801 - 0.1047i -0.0508 13)dcgain(w) ans =1.0000 14) Wu=minreal(c/(1+c*G*H)) Zero/pole/gain from input "Output" to output "Output": 20.0986 s (s+0.05263) (s+0.05556) (s+0.2) (s+1) ------------------------------------------------------------ (s+0.05082) (s^2 + 0.1601s + 0.01737) (s^2 + 2.045s + 1.065) 15) step(Wu) Лабораторная работа №3 Тема: Моделирование систем управления в пакете Simulink Вариант11 Описание системы Движение судна описывается линейной математической моделью в виде передаточной функции 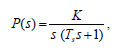 где К=0.08рад/сек,Ts=18,0сек, где К=0.08рад/сек,Ts=18,0сек,Привод моделируется как интегрирующее звено,охваченное единичной орицательной обратной связью,так что его передаточная функция равна: Измерительное устройство(гирокомпас) моделируется как апериодическое звено с переодичной функцией  Tос=6сек, Tос=6сек,Исследование системы с ПД- регулятором -передаточная функция ПД-регулятора, обеспечивающего переходный процесс минимальной длительности  Ts=18.0 сек,Tv=1сек -модель системы с ПД- регулятором 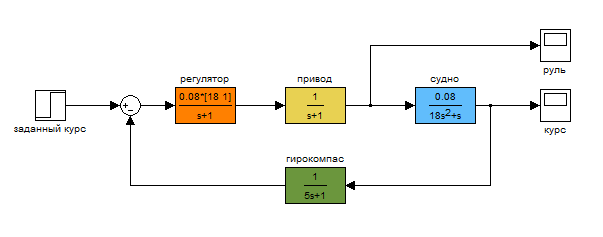 -переходные провесы в системе с ПД-регулятором при изменении курса на 10градусов 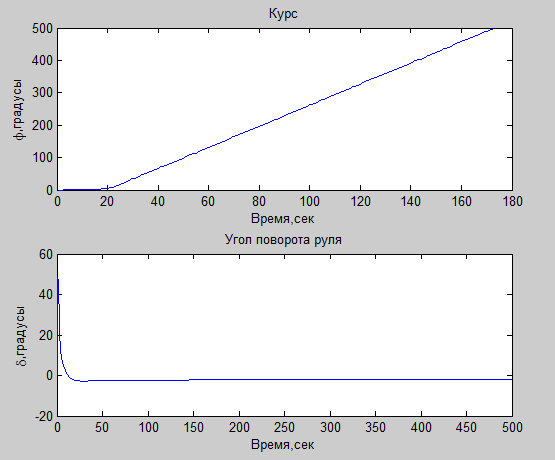 -модель системы с ПД- регулятором с учетом внешнего возмущения 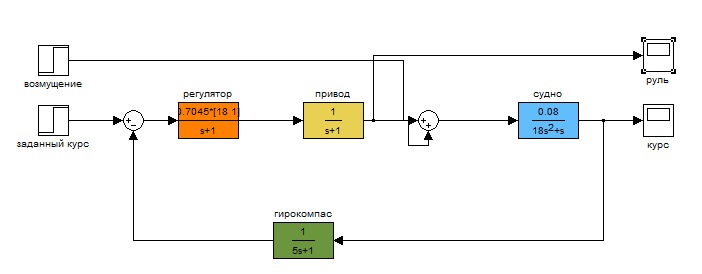 -передаточная функция по возмущению для системы с ПД- регулятором  -судно с ПД- регулятором не вышло на заданный курс 10 градусов ,потому что -статический киэеффициент усиления Кs=1,518,установившеесе значение сигнала выхода должно быть равно….,потому что;эти данные согласуются с результатами моделирования. 3. Исследование системы с ПИД-регулятором -передаточная функция ПИД- регулятора -модель системы с ПИД- регулятором с учетом внешнего возмущения 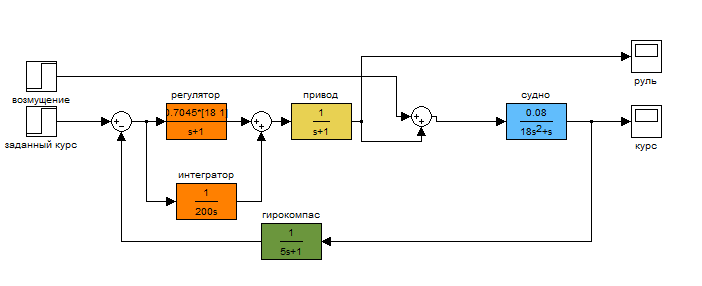 -передаточная функция по возмущению системы с ПИД- регулятором  -при использовании ПИД-регулятора судно выходит за заданный курс,потому что… -статический коэффициент Ks=…,установившееся значение сигнала выхода должно быть равно ….,потому что;эти данные согласуются с результатами моделирования -переходные проуессы в системах с ПДи ПИД- регуляторами 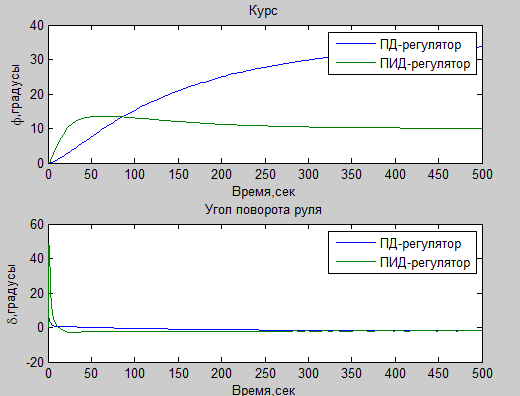 -при использовании ПИД-регулятора вместо ПД- регулятора …. -при этом сигнал управления… -в то же время(ухудшилось) -передаточная функция разомкнутой системы с ПИД- регулятором рассчитывалась следующим образом 1)p=tf(0.08,[18 1 0])-передаточная функция модели судна Transfer function: 0.08 ---------- 18 s^2 + s 2)R0=tf(1,[1 0])-передаточная функция интегрирующего звена Transfer function: 1 - s 3) R=feedback(R0,1)-передаточная функция рулевого устройства Transfer function: 1 ----- s + 1 4) G=p*R –передаточная функция последовательного соединения объекта с приводом Transfer function: 0.08 ------------------- 18 s^3 + 19 s^2 + s 5) H=tf(1,[5 1])- передаточная функция измерительного устройства Transfer function: 1 ------- 5 s + 1 6) L=G*H-передаточная функция разомкнутого контура Transfer function: 0.08 ----------------------------- 90 s^4 + 113 s^3 + 24 s^2 + s 7) sisotool 8) cpd=1+tf([18 0],[1 1])- передаточная функция пропорционально-дифференциального(ПД)регулятора Transfer function: 19 s + 1 -------- s + 1 9) w=c*G/(1+c*G*H)- передаточная функция полученной замкнутой системы. 0.084444 s (s+0.05263) (s+0.05556)(s+0.2) (s+1)^2 ---------------------------------------- s (s+1)^2 (s+0.05556) (s+0.05065)(s^2 + 0.1625s + 0.01652)(s^2 + 2.042s + 1.062) 10) w=minreal(w)-минемальная реализация передаточной функции 0.084444 (s+0.05263) (s+0.2) ---------------------------------------- (s+0.05065) (s^2 + 0.1625s + 0.01652)(s^2 + 2.042s + 1.062) 11)wu=minreal(c/(1+c*G*H))- минимальная реализация передаточной функции замкнутой системы от входа к сигналу управления(выходу регулятора) 19 s (s+0.05263) (s+0.05556) (s+0.2) (s+1) ---------------------------------------- (s+0.05065) (s^2 + 0.1625s + 0.01652)(s^2 + 2.042s + 1.062) -Запас устойчивости : [gm,phim]=margin(w) gm = 23.3962 phim = 123.2847 gm=20*log10(gm) gm =27.3829 запасы являются достаточными. |