Геод. контроль ЭКЗАМЕН ОТВЕТЫ. Геод. контроль ЭКЗАМЕН ОТВЕТЫ (1). К настоящему времени созданы и реализованы в нормативнотехнических
 Скачать 2.64 Mb. Скачать 2.64 Mb.
|

|
Нивелирование следует проектировать по следующей схеме: -построение локальной сети высотного обоснования – первая ступень; -построение локальных сетей и ходов для контроля деформаций каждого здания или сооружения – вторая ступень; -построение локальных сетей и ходов для контроля деформаций оборудования различного вида, размещенного внутри зданий и сооружений – третья ступень; - построение хода связи между ступенями. Локальная сеть первой ступени служит для контроля параметра «абсолютная» или «средняя» осадка здания и оценки неподвижности исходных глубинных реперов. Ходы первой ступени проектируют по глубинным реперам. Как правило, для отдельного здания проектируются ходы в виде замкнутого полигона или хода, а для группы зданий – в виде нескольких полигонов. Ходы второй ступени служат для контроля параметров, определяющих деформацию взаимосвязанных конструкций здания, и одновременно необходимы в дальнейшем для контроля параметров «абсолютная» или «средняя» осадка здания. Поэтому ходы второй ступени прокладывают по маркам, установленным на конструкциях зданий и сооружений. Такие ходы являются локальными для каждого объекта и могут образовывать один полигон на небольших объектах или систему замкнутых полигонов и ходов на крупных объектах. Ввиду множества марок на крупных объектах, а также затруднения нивелирования между марками взаимосвязанных конструкций из-за загруженности цеха производственным оборудованием, ходы второй ступени разделяют на основные и вспомогательные. Основные ходы проектируют в виде системы полигонов по маркам колонн каркаса здания с выборочным включением марок и учетом конструктивных особенностей помещений. Как правило, эти ходы проектируют вдоль рядов колонн здания, при этом длины плеч при нивелировании, в условиях возмущающих воздействий работающего оборудования цеха на нивелир, принимают не более 25 метров. В начале и в конце каждого цеха (в зонах, свободных от оборудования) производится соединение продольных ходов в единую систему полигонов объекта. Вспомогательные ходы прокладывают от марок основных ходов в виде висячих ходов с минимальным числом станций (лучше одна станция). При этом точность измерения превышения в дальнейшем при расчетах принимают равной точности основного хода. Третья ступень нивелирования по точности и схеме построения ориентируется на контроль геометрических параметров технологического оборудования, расположенного внутри зданий и сооружений. Ходы третьей ступени прокладывают по контрольным маркам, размещенным на самом оборудовании или его фундаменте. Они также представляют собой локальные системы ходов для каждого объекта. Схемы ходов третьей ступени зависят от конфигурации оборудования, условий измерений и образуют, как правило, один замкнутый ход на каждом контролируемом объекте. Для сложных и протяженных объектов могут проектироваться сложные системы ходов, аналогичные системам второй ступени. Для сложных объектов (высотных плотин, турбоагрегатов и др.) и решения задач по раздельному контролю ряда параметров ходы нивелирования могут проектироваться и в виде нескольких уровней, как связанных, так и не связанных между собой. Ход связи между первой и второй, а также второй и третьей ступенями служит для передачи отметок от глубинных реперов на марки здания и оборудования и, следовательно, необходим для контроля параметра «абсолютная» или «средняя» осадка здания. Ход связи между ступенями должен быть одним (а не несколько, как в высотных сетях для съемочных работ). Это обусловлено тем, что из-за меньших величин допусков во второй ступени, расчетная точность измерений превышений, как правило, намного выше, чем в первой (тоже между второй и третьей). Поэтому, если запроектировать несколько ходов связей между первой и второй ступенями (аналогично между второй и третьей), результаты точных измерений во второй ступени могут быть существенно искажены при вынужденном совместном их уравнивании. Как уже было сказано, основным методом контроля осадок объектов промышленных предприятий является метод геометрического нивелирования короткими лучами. Этот метод позволяет охватить очень широкий диапазон точностей измерений превышений (от 0,05 до 5 мм на одну станцию), позволяет вести измерения в широком диапазоне внешних и внутренних воздействий природной и производственной среды, имеет более высокую производительность по сравнению с другими методами и более низкую стоимость работ. Несмотря на обширные исследования в области производства нивелирных работ, особенно по изучению осадок сооружений, слабым местом является отсутствие единой классификации и единой методики измерений. (Примечание. Задачи и некоторые пути решения этой проблемы см. в заключении.) В настоящее время при контроле осадок инженерных объектов используют следующие виды классификаций и методик геометрического нивелирования: государственное нивелирование I, II, III и IY классов; разрядное нивелирование для измерения осадок гидротехнических сооружений; разрядное нивелирование для измерения деформаций оснований зданий и сооружений; нивелирование специальных классов для инженерно-геодезических работ. Основные технические характеристики названных видов классификаций геометрического нивелирования приведены в табл. 4.2.1 – 4.2.4. Каждая из приведенных видов и методик нивелирования имеет свои положительные и отрицательные стороны в зависимости от объектов и условий контроля. Технические характеристики государственного нивелирования I, II, III и IY классов
# 21Геодезические работы по контролю кренов и их приращений. Оптический метод измерений: способ малых углов В способе малых углов производят измерения на каждом из трех-четырех пунктов наблюдения малого горизонтального угла между направлениями на центр своего (для данного пункта) наиболее низкого пояса и центр верхнего пояса (рис. 4.4.6), а также зенитных расстояний этих направлений. При этом пункты наблюдений могут быть не связаны друг с другом. В отличие от предыдущего способа, за начальное направление при измерении малого угла принимают направление на центр своего нижнего сечения, так что установки ориентирных пунктов в данном случае не требуется. 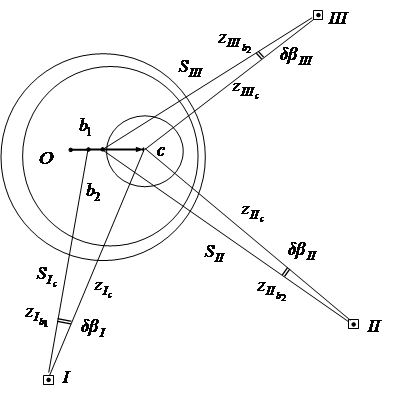 Рис. 4.4.6. Способ малых углов По результатам измерений малого угла между направлениями на центры верхнего и нижнего поясов и зенитных расстояний этих направлений вычисляют сначала величины частных и полных поперечных кренов, а затем значение полного крена из двух комбинаций по формулам (4.4.17) ‑ (4.4.20). Для определения величины и направления крена по способу направлений сначала вычисляют значения частных поперечных кренов 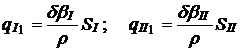 (4.4.17) (4.4.17)Величины полных поперечных кренов определяют по формулам: 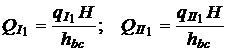 (4.4.18) (4.4.18)По составляющим крена вычисляют величину полного (абсолютного) крена в первом цикле из первой комбинации засечки (с первой пары пунктов наблюдения):  (4.4.19) (4.4.19)где угол засечки Величину и направление полного крена по данным наблюдений способом малых углов можно определить расчетно-графическим путем при наличии плана территории масштаба 1:500 – 1:1000. На план с показанным на нем сооружением наносят определенные линейкой или угловой засечкой от ближайших предметов и контуров (также показанных на плане) пункты наблюдения. От них проводят направления на центр основания сооружения. От этой точки перпендикулярно направлениям I – O и II – O откладывают в масштабе 1:1 или 1 : 2 векторы полных поперечных кренов Через концы отложенных векторов проводят линии, параллельные направлениям I – O и II – O (рис. 4.4.7). Точка пересечения этих линий с определяет положение конца вектора полного крена Q, т. е. проекцию центра верхнего пояса на горизонтальную плоскость. В случае наблюдений с трех-четырех пунктов величину и направление полного крена находят аналогичным путем по правилу перпендикуляров к направлениям «пункт наблюдения – центр основания» (рис. 4.4.7, б).   Рис. 4.4.7. Графическое определение величины и направления крена в способе малых углов: а) с двух направлений; б) с трех направлений Расчетно-графический способ дает меньшую точность по сравнению с аналитическим, однако для практических целей вполне подходит. Положительным фактором способа, по сравнению с предыдущими, является отказ от закладки ориентирных пунктов, что снижает затраты на контроль и создает большее удобство в выборе направлений. К отрицательному фактору следует отнести снижение точности измерений из-за возможного ошибочного выбора точек на самом объекте в первый цикл измерений. Способ малых углов целесообразно применять: 1) при летучем контроле сооружений (по точкам ствола сооружения), когда систематические измерения не производились; 2) при активном контроле по маркам, установленным на стволе сооружения (однако это часто невозможно из-за трудности их установки в процессе эксплуатации сооружения). # 22Геодезические работы по контролю кренов и их приращений. Оптический метод измерений: способ зенитных расстояний Способ зенитных расстояний применяется так же, как и способ проектирования, для контроля с невысокой точностью сооружений небольшой высоты. В этом способе на продолжениях двух взаимно перпендикулярных диаметров выбранного цокольного сечения необходимо смонтировать четыре кронштейна с устройствами для принудительного центрирования с таким расчетом, чтобы оси вращения теодолитов, установленных на двух диаметрально противоположных кронштейнах, находились на одинаковом удалении от поверхности сооружения. Неравенство этих расстояний не должно превышать 5 мм. На верхнем сечении, в створах диаметрально противоположных кронштейнов или параллельно им, устанавливаются четыре визирные марки, причем на одинаковом расстоянии от краев сечения. Для наблюдения этим способом сооружений с квадратным и прямоугольным сечением установку кронштейнов и марок целесообразно выполнять соответственно по диагоналям и посередине сторон цокольного и верхнего сечения. С каждого кронштейна измеряют малое зенитное расстояние направления на свою марку (рис. 4.4.9). Для этого теодолит должен быть снабжен специальной насадкой на объектив или окуляр в виде прямоугольной преломляющей призмы. Для упрощения определения крена этим способом необходимо при установке диаметрально противоположных кронштейнов обеспечить равенство высот инструмента в пределах 1 см. В этом случае крен сооружения в угловой мере в створе диаметрально противоположных станций может быть определен по простым формулам: З 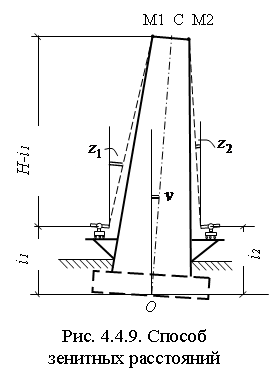 десь десь В случае установки кронштейнов на разной высоте угловая величина крена определяется формулой  (4.4.28) (4.4.28)по результатам наблюдений с одной пары станции и аналогичной формулой с другой пары станций. В последнем выражении: H – высота сооружения от подошвы фундамента; i1 и i2 – высота инструмента над уровнем подошвы фундамента соответственно на стан-циях 1 и 2, определяемая как сумма высот оси вращения трубы над соответствующей точкой поверхности земли и этой точки над подошвой фундамента. Створный крен в линейной мере определяют по формуле Полный крен сооружения Q может быть найден по формуле Для определения направления крена на одно из направлений, определяемое двумя диаметрально противоположными визирными марками, следует передать дирекционный угол с ближайшей стороны геодезической сети. При отсутствии таковой можно одну пару визирных марок и соответствующую пару кронштейнов ориентировать по магнитному меридиану. Точность определения наклона сооружения в створе диаметрально противоположных станций можно оценить по формуле: где mz – средняя квадратическая погрешность измерения зенитного расстояния. Оценку точности определения линейной величины составляющей и полного крена можно произвести по формулам:  (4.4.32) (4.4.32) (4.4.33) (4.4.33)Точность способа зависит от точности измерения зенитных расстояний и поэтому в значительной степени ограничивается влиянием вертикальной рефракции и колебаниями изображений наблюдаемых визирных целей, вызываемыми конвекционными токами воздуха в прилегающем к сооружению слое от солнечного нагрева его поверхности (а при наблюдениях промышленных дымовых труб – и от внутреннего нагрева). Возможность его практического применения ограничивается также необходимостью специального оборудования сооружения кронштейнами и марками, а также необходимостью применения специальных насадок на инструмент. # 23Геодезические работы по контролю кренов и их приращений. Оптический метод измерений: способ наклонного проектирования Способ наклонного проектирования применяется для контроля наклона сооружений небольшой высоты при условии обеспечения видимости и доступа к нижней их части. Способ удобен для выверки вертикальности оси сооружения и в процессе строительства. С каждого из трех пунктов наблюдения проектируют коллимационной плоскостью теодолита при двух кругах на рейку, установленную горизонтально по касательной к выбранному цокольному сечению, перпендикулярно направлению «пункт наблюдения – центр цокольного сечения», центры верхнего си нижнего, цокольного b сечений (рис. 4.4.8). 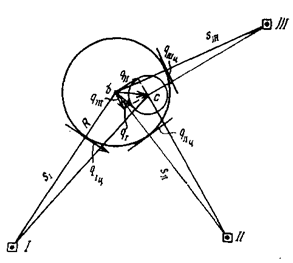 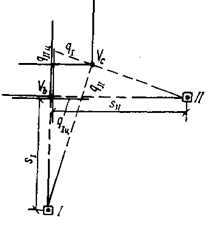 Рис. 4.4.8. Способ вертикального проектирования: а) для сооружения с круглым сечением; б) для сооружения с прямоугольным или квадратным сечением Для определения точки касания рейки к цокольному сечению визируют при одном круге на левый и правый края цокольного сечения, производя отсчеты по горизонтальному кругу. Установив на последнем среднее из обоих отсчетов (указывающее направление на центр цокольного сечения при этом круге), по биссектору на цокольном сечении фиксируют точку. То же самое делают и при другом круге теодолита. Средняя между двумя точками принимается за искомую. Рейка прикладывается к найденной точке своей серединой перпендикулярно к направлению съемки с помощью угольника и теодолита. Закрепив рейку в указанном положении, проектируют на ее переднюю плоскость (так же, как и при нахождении точки касания рейки) центр цокольного сечения и отмечают проекцию карандашной меткой. Далее проектируют центр верхнего сечения: устанавливают на горизонтальном круге отсчет, равный среднему из значений направлений на оба края верхнего пояса, измеренных при двух кругах (это среднее предварительно необходимо исправить поправкой за наклон оси вращения инструмента, для чего должно быть измерено зенитное расстояние соответствующего направления), и, опустив трубу, делают на рейке по биссектору метку. Проектирование центров обоих сечений выполняют с каждого пункта наблюдения дважды. За окончательную проекцию каждого центра принимают среднюю из двух соответствующих меток. Полученный на рейке отрезок между проекциями центров цокольного и верхнего сечений представляет собой частный поперечный крен где R – радиус наблюдаемого цокольного сечения, известный из паспорта, или определяемый путем измерений; Полный поперечный крен Величины полных поперечных кренов определяют по формулам: (4.4.18)Требуемое для этого превышение Аналогичным образом получают Далее по формуле (4.4.19) По составляющим крена вычисляют величину полного (абсолютного) крена в первом цикле из первой комбинации засечки (с первой пары пунктов наблюдения): (4.4.19)вычисляют величину полного крена из 1-й и 2-й комбинаций засечки и принимают за окончательное его значение среднее из двух значений. Оценку точности определения крена выполняют по формулам (4.4.22) и (4.4.23). Точность определения составляющих приращения крена из первой комбинации в каждом цикле оценивают по формулам:  , (4.4.22) , (4.4.22)где По таким же формулам определяют СКП приращения полных поперечных кренов из второй комбинации. Точность определения приращения полного крена из каждой комбинации можно оценить по формулам:  (4.4.23) (4.4.23)Направление крена определяют по магнитным азимутам направлений с пунктов наблюдения на центр цокольного сечения. По результатам проектирования величину и направление крена можно определить и расчетно-графическим путем по аналогии со способом малых углов. Наблюдения сооружений с постоянным квадратным или прямоугольным сечением можно осуществлять с двух пунктов наблюдения (I и II), находящихся в створах взаимно перпендикулярных соседних граней, образующих одно из ребер сооружения (рис. 4.4.8, б). В цокольной части закрепляют одну под другой в горизонтальном положении две рейки, приставленные вплотную к цоколю так, чтобы каждая из них одним концом выступала за угол примерно на 0,5 м (см. рис. 4.4.8, б). Непосредственно над верхней рейкой на указанном ребре намечают точку, в верхней части того же ребра выбирают заметную точку. При двух положениях вертикального круга проектируют на рейки нижнюю, а затем верхнюю точки, получая в результате на рейках величины частных поперечных кренов в центральной проекций  (4.4.26) (4.4.26)Дальнейшая обработка результатов наблюдений производится по формулам (4.4.18), (4.4.19), (4.4.22) и (4.4.23). Направление полного крена можно определить по магнитным азимутам направлений засечки. Для сооружений с переменным квадратным или прямоугольным сечением способ проектирования позволяет выявить только приращения крена между циклами наблюдений при условии обеспечения постоянства установки реек. # 24Исполнительные съёмки. Особенности исполнительной съёмки промышленных предприятий Оценка технического состояния надфундаментных основных несущих конструкций может быть произведена на основе расчѐта их на прочность, деформативность и трещиностойкость. Предрасчѐт производится на основании фактических данных, полученных при освидетельствовании зданий и сооружений: величин отклонений, перемещений, осадок, деформаций; характеристик материалов, нагрузок и т. д. Конкретные значения геометрических параметров устанавливаются для каждого здания или сооружения в зависимости от конструктивных решений и материала конструкций. По характеру взаимодействия и приложения параметры подразделяются на следующие: - местные деформации строительных элементов (раскрытие трещин, прогибы); - взаимное положение конструкций (разность осадок, смещения, зазоры); - пространственное положение конструкций (отклонения от осей вертикали, горизонтали). Первые параметры характеризуют прочность и устойчивость одного элемента, вторые и третьи – устойчивость всего сооружения. Методы и средства геодезического контроля названных геометрических параметров могут широко варьироваться – от простых инструментов (измерительная линейка, щуп для измерения зазоров) до сложных пространственных построений, требующих применения совместных геодезических и машиностроительных методов и средств измерений. Достаточно эффективными методами геодезического контроля параметров взаимного и пространственного положения конструкций являются методы геодезических исполнительных съёмок, позволяющие получать данные одновременно взаимного пространственного и, во многих случаях, местного положения конструкций. Такие исполнительные съёмки должны включать в себя плановую и высотную съёмки конструкций, по возможности, от тех же точек исходной основы (точек закрепления осей, реперов), которые использовались при строительстве здания, и по тем характерным точкам, которые фиксировались при исполнительной съѐмке законченного строительством здания. Сохранение исходных и контрольных точек позволяет выявить по разностям результатов исполнительных съемок как отклонения конструкций от проектных осей и отметок, так и величины деформаций. Так как результаты измерений при исполнительных съѐмках используются для расчетов устойчивости рам с учетом пространственной работы каркаса здания в пределах блока (порядка 60 – 120 м), необходимо иметь отклонения рамных элементов каркаса от осей и отметок также в пределах не менее блока. Этот параметр является отправным для назначения точности съёмочных работ и выбора методов и средств измерений. Результаты геодезического контроля деформаций надфундаментных конструкций анализируются службами эксплуатационной организации и проектного института. На основе анализа результатов контроля деформаций и обследования конструкций производят оценку технического состояния объекта и планируют технические мероприятия по устранению дефектов. Технология геодезического контроля деформаций строительных конструкций здания состоит из трех основных процессов: проектирование технологии контроля: - выбор объектов, параметров и процессов контроля; - разработку схем съемочных работ, расчеты точности измерений элементов схем, выбор методов и средств измерений; - разработку методов обработки результатов измерений и форм отчетной документации по контролю; 2) проведение контроля деформаций конструкций на объекте, включающее: - подготовку персонала, приборов, приспособлений, маркировку съемочных точек (при необходимости); - проведение мероприятий по технике безопасности; - выполнение измерений; 3) обработка и анализ результатов измерений, включающие: - проверку и обработку первичной документации; - уравнивание; - вычисление деформаций конструкций; - интерпретацию результатов; - заполнение паспорта контроля или составление технического отчета. Исполнительные съемки конструкций зданий и сооружений промышленных предприятий разделяют на плановые и высотные. Плановые исполнительные съёмки позволяют обеспечить сплошной контроль вертикальных элементов здания и получить прогибы и отклонения колонн от осей, а высотные – прогибы и наклоны горизонтальных элементов. Методика плановых исполнительных съёмок каркасов промышленных зданий и сооружений в большей степени зависит от их конструктивных решений, производственных условий и факторов, определяющих выбор методов и средств измерений. # 25Исполнительные съёмки. Особенности исполнительной съёмки технологического оборудования Из всего разнообразия геодезических работ, связанных с контролем средств технического оснащения зданий, самое широкое распространение в практике эксплуатации сооружений получили геодезические работы по контролю подкрановых путей мостовых кранов, как наиболее распространенных средств технического оснащения промышленных зданий и сооружений. Эти работы наиболее сложны в техническом отношении и зачастую требуют высокой точности измерений. Это связано, прежде всего, с разнообразием видов и габаритов кранов и крановых конструкций, различной протяженностью путей и пролетов кранов, условиями эксплуатации самих кранов и условиями ведения геодезических работ в цехах. Поэтому основное внимание в дальнейшем уделим именно этим средствам технического оснащения зданий и сооружений. Грузоподъемные краны относятся к оборудованию повышенной опасности. Поэтому, для обеспечения безопасной эксплуатации грузоподъемных кранов установлен государственный технический надзор за их изготовлением и эксплуатацией, осуществляемый органами Госгортехнадзора. Изготовление, устройство и эксплуатация грузоподъемных кранов осуществляются в соответствии с «Правилами устройства и безопасной эксплуатации грузоподъемных кранов». Наряду с этими условиями, в различных отраслях промышленности существуют дополнительные ведомственные условия и требования эксплуатации, связанные с особенностями конкретных производств. Для того, чтобы грузоподъемные краны и их подкрановые пути соответствовали техническим условиям, указанными нормативными документами предусмотрен ряд мероприятий, одним из которых является систематический контроль, в процессе которого определяются фактические параметры путей и габариты кранов. В ряде случаев материалы контроля позволяют не только оценить соответствие положения путей требованиям Госгортехнадзора, но и выявить значительные деформации каркаса здания. Исполнительные съемки подкрановых путей мостовых кранов зданий и сооружений промышленных предприятий разделяют на плановые, высотные и координатные. Плановые исполнительные съёмки позволяют обеспечить контроль параметров, характеризующих плановое положения рельсов и подкрановых балок, а также контроль боковых зазоров между краном и колоннами. Измерение всех параметров, как правило, производится раздельно. Высотные исполнительные съемки позволяют обеспечить контроль параметров, характеризующих высотное положение рельсов и подкрановых балок, а также контроль зазоров между верхом тележки крана и покрытием. Измерение параметров может производиться как раздельно, так и совместно. Координатная съемка позволяет обеспечить контроль нескольких параметров, характеризующих плановое и высотное положение подкрановых конструкций совместно. Проектирование геометрических схем и технологических процессов исполнительных съёмок подкрановых путей мостовых кранов промышленных зданий и сооружений в большей степени зависит от габаритов кранов и путей и их конструктивных решений, а также от производственных условий и факторов, определяющих выбор методов и средств измерений. К важнейшим из них относятся: 1. производство геодезических работ в условиях закрытого производственного здания и влияния производственных воздействий на точность измерений; 2. отсутствие закрепленных разбивочных осей, что заставляет решать проблему выбора осей на исходном горизонте; 3. степень занятости кранов в производственных или монтажных процессах, что сказывается на продолжительности измерений и выборе средств измерений; 4. конструктивные решения устройства пути и крана, что сказывается на выборе методики измерений, мест размещения геодезических приборов и возможностях безопасного перемещения и работы контролеров. Согласно нормативных документов, величины допустимых эксплуатационных отклонений путей не зависят от величины пролета и протяженности; поэтому проектные абсолютные погрешности контроля параметров для одной и той же категории контроля будут одинаковыми, в то время как относительные погрешности могут различаться даже в десятки раз. Все вышесказанное говорит о том, что схемы, методы и средства измерений параметров могут широко варьироваться. Вместе с тем, для определенных типов мостовых кранов и их путей существуют многократно апробированные на производстве рациональные схемы и методики. 2 блок Виды и классы нивелирования. Контрольно-измерительная аппаратура, используемая при различных классах нивелирования. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||