ИССЛЕДОВАНИЕ САУ СКОРОСТЬЮ ПОЛЕТА С ИСПОЛЬЗОВАНИЕМ АВТОМАТА ТЯГИ. 6 Вариант Кравченко. Кафедра аэрокосмических приборов и систем
 Скачать 345.71 Kb. Скачать 345.71 Kb.
|

|
МИНИСТЕРСТВО НАУКИ И ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное автономное образовательное учреждение высшего профессионального образования «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ АЭРОКОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ» КАФЕДРА АЭРОКОСМИЧЕСКИХ ПРИБОРОВ И СИСТЕМ ОТЧЕТ ЗАЩИЩЕН С ОЦЕНКОЙ ПРЕПОДАВАТЕЛЬ
РАБОТУ ВЫПОЛНИЛ
Санкт-Петербург, 2020 СодержаниеОТЧЕТ О ЛАБОРАТОРНОЙ РАБОТЕ 1 ИССЛЕДОВАНИЕ САУ СКОРОСТЬЮ ПОЛЕТА С ИСПОЛЬЗОВАНИЕМ АВТОМАТА ТЯГИ 1 по курсу: системы автоматического управления полетом 1 1Цель работы 3 2Задача 3 3Данные по варианту 3 4Расчетная часть 3 5Передаточные функции 5 5Выполнение моделирования для изучения САУ 7 6Выводы 10 Выводы 9 Цель работы Целью работы является изучение назначения, принципа действия и характеристик системы автоматического управления углом тангажа самолета; исследование методом математического моделирования влияния законов управления на основные характеристики системы. Задача Изучить принципы построения САУ углом тангажа самолета; Рассчитать законы управления для статического и астатического САУ; - Экспериментально исследовать САУ с различными законами управления на ЭВМ. Данные по варианту - Тяжелый самолет; - Высота(H) = 12км; - Число маха(М) = 0,9; - Аэродинамическая постоянная времени самолета (τа) = 3с; - Размерная частота (ωразм) = 2,74  ; ;- безразмерные коэффициенты, зависящие от конструкции самолета: n22=2,4, n0=0,68, n32=36, n33=2,42, nв=46; - коэффициенты для астатической САУ (А1=А2) = 2,15; - коэффициент для статической САУ (ξ) = 0,7. Расчетная часть Значения, заданные изначально: Самолет легкий, Н= 12км, М=0,9,τа=3с, ωразм=2,74, n22=2,4, n0=0,68, n32=36, n33=2,42, nв=46, А1=А2=2,15, ξ=0,7. Нахождение передаточных чисел для статической САУ углом тангажа самолета можно начать с расчета следующих значений.  Где  собственная частота; собственная частота;    Расчет передаточных чисел автопилота для статической САУ:    Нахождение значений для астатической САУуглом тангажа самолета можно начать с расчета следующих значений.    Расчет передаточных чисел автопилота для астатической САУ:     Передаточные функции Математическое описание самолета по углу тангажа. При горизонтальном полете в случае короткопериодического уравнения движения будут иметь следующий вид:  ; ; , (1) , (1)Где n22, n0, n32, n33, nв – безразмерные коэффициенты, зависящие от конструкции самолета, f2, f3– внешние возмущения, δв – отклонение руля высоты. Из данных уравнений путем преобразования Лапласа при нулевых начальных условиях можно получить передаточную функцию самолета по углу тангажа υ при управлении рулем высоты δв:  , ,где  ; ; . .Синтез законов управления для САУ углом тангажа посредством статического автопилота. Рассмотрим статическую систему автоматического управления углом тангажа, включающую контур управления угловой скоростью и контур управления углом тангажа. Закон управления примем в виде:  ,(2) ,(2)где υз – заданное значение угла тангажа;  – коэффициенты закона управления (передаточные числа). – коэффициенты закона управления (передаточные числа).Решая систему уравнений (1) совместно с законом управления (2) получается уравнение замкнутой системы  Данная САУ обладает статической ошибкой при действии возмущений. Выбор параметров закона управления в общем случае производится на основе минимизации некоторого функционала качества замкнутой системы. Выбранные таким образом параметры должны обеспечивать воспроизведение с допустимой погрешностью заданного угла тангажа при слабом реагировании на возмущения f2иf3. Структурная схема САУ углом тангажа посредством статического автопилота с жесткой обратной связью изображена на рисунке 1. Передаточная функция ЛА по угловой скорости тангажа:  ; ;Передаточная функция ОС:  . .Для САУ углом тангажа посредством астатического автопилота динамика самолета описывается как и в предыдущем случае (1). Закон управления астатического автопилота имеет вид:  , (3) , (3)Где коэффициенты  – передаточные числа. – передаточные числа.Решив систему уравнений (1) с (3) получится уравнение замкнутой системы:  , ,где  . .Поскольку возмущение входит под знак оператора дифференцирования, то система не имеет статических погрешностей (является астатической) по отношению к углу тангажа при действии возмущений. Структурная схема САУ углом тангажа посредством астатического автопилота со скоростной обратной связью изображена на рисунке 4. Передаточная функция ЛА по угловой скорости тангажа  аналогична передаточной функции ЛА по угловой скорости тангажа для статической САУ. аналогична передаточной функции ЛА по угловой скорости тангажа для статической САУ.Передаточная функция ОС:  . .Выполнение моделирования для изучения САУ Общий вид схемы в среде разработки Simulink для статической САУ углом тангажа приведен на рисунке 1. Реакция системы с обратной связью и без нее представлены в соответствии с рисунками 2 и 3. 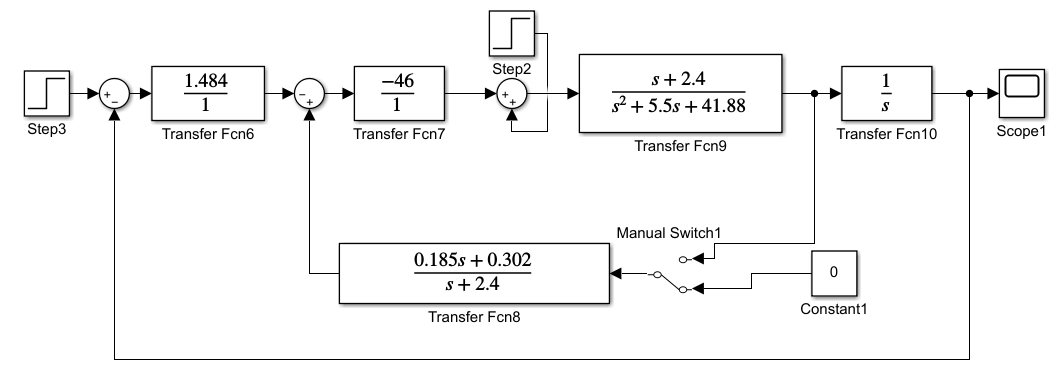 Рисунок 1 – Структурная схема для статической САУ 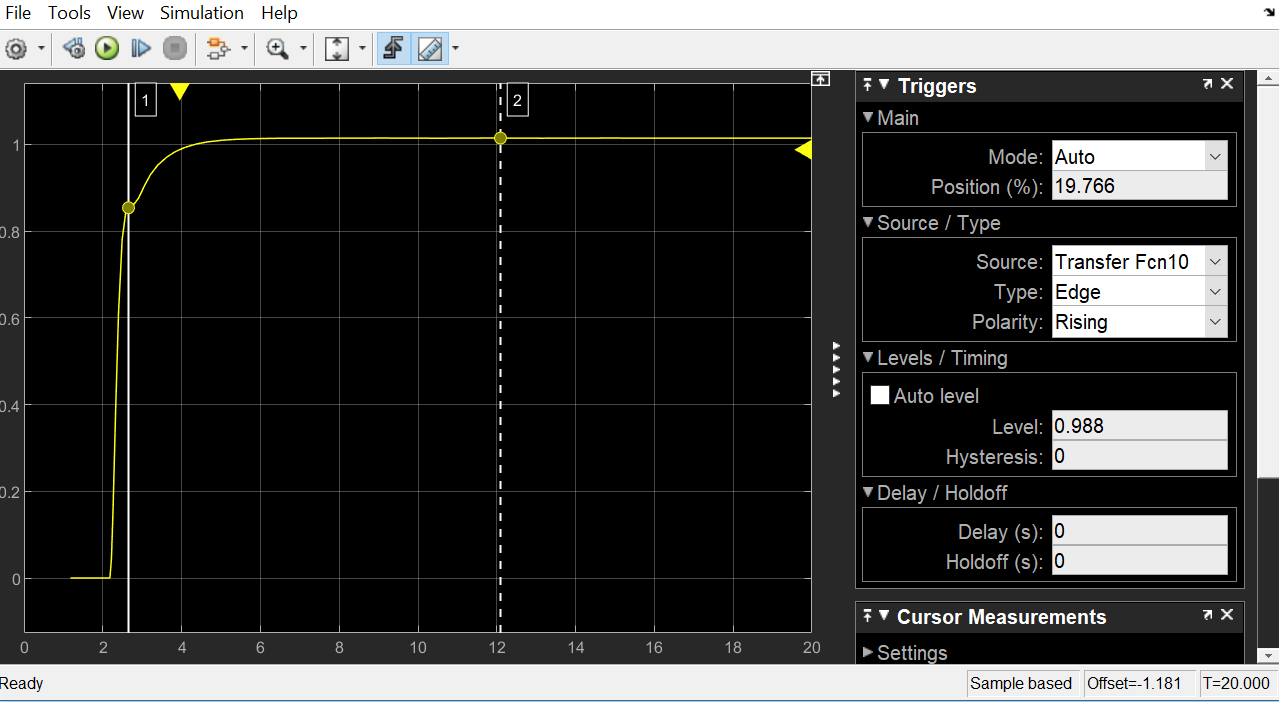 Рисунок 2 – Реакция системы при наличии ОС 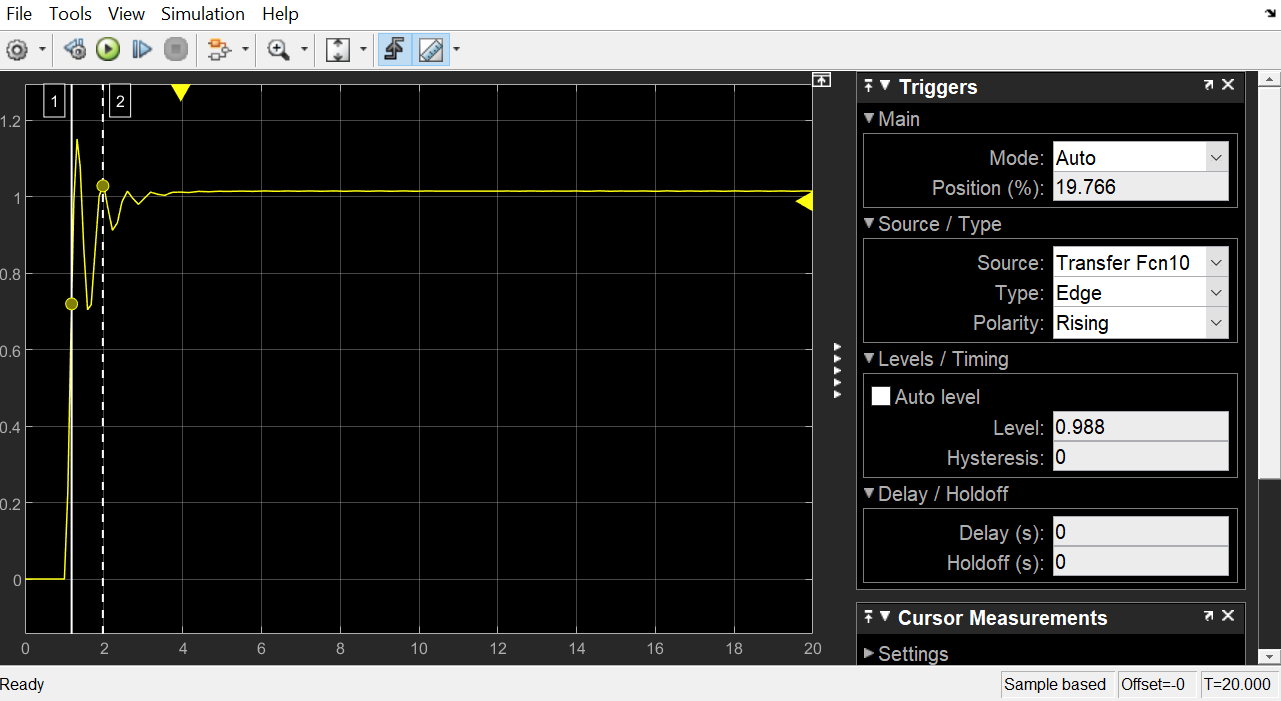 Рисунок 3 – Реакция системы без ОС Для астатической САУ углом тангажа самолета была смоделирована структурная схема в соответствии с рисунком 4. Реакция системы с наличием обратной связи и без нее представлены на рисунках 5 и 6 соответственно. 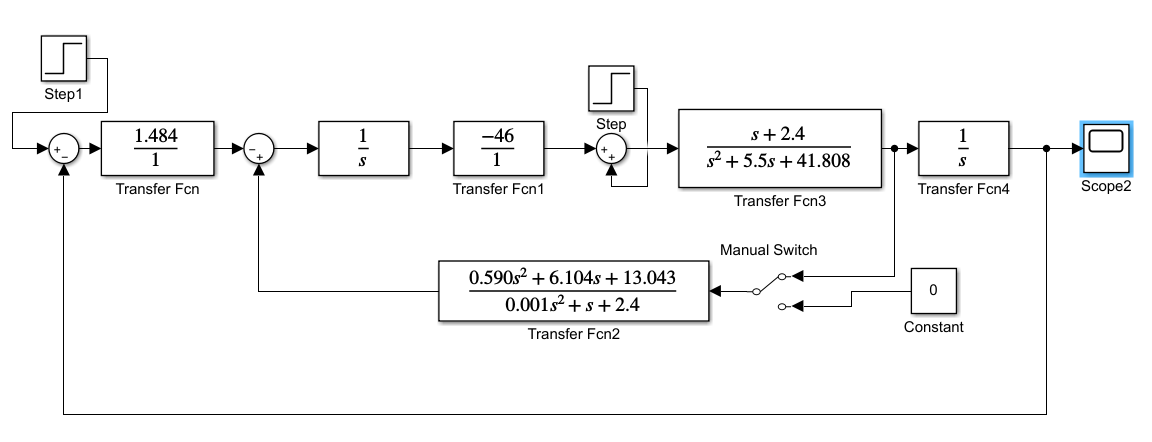 Рисунок 4 – Структурная схема астатической САУ 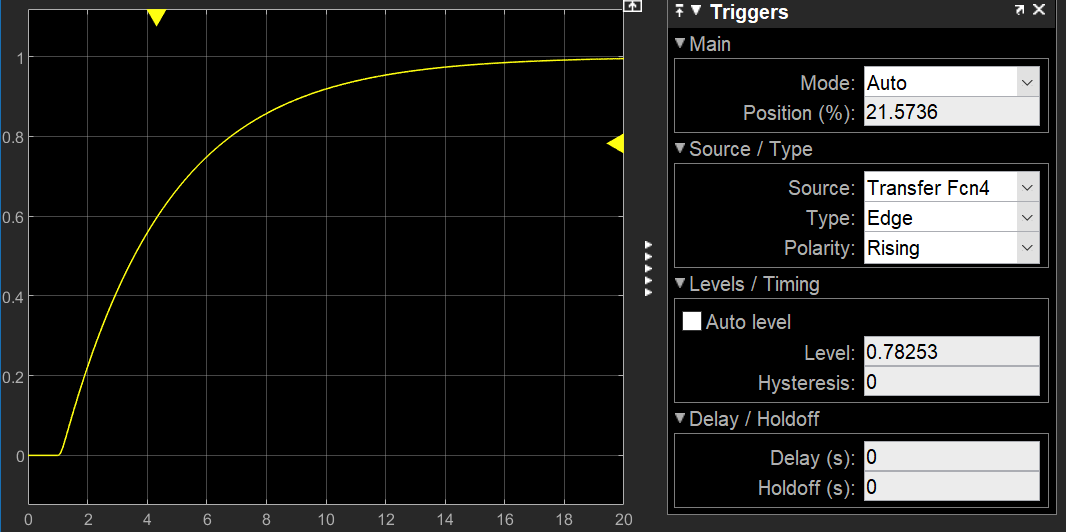 Рисунок 5 – Реакция системы при наличии ОС 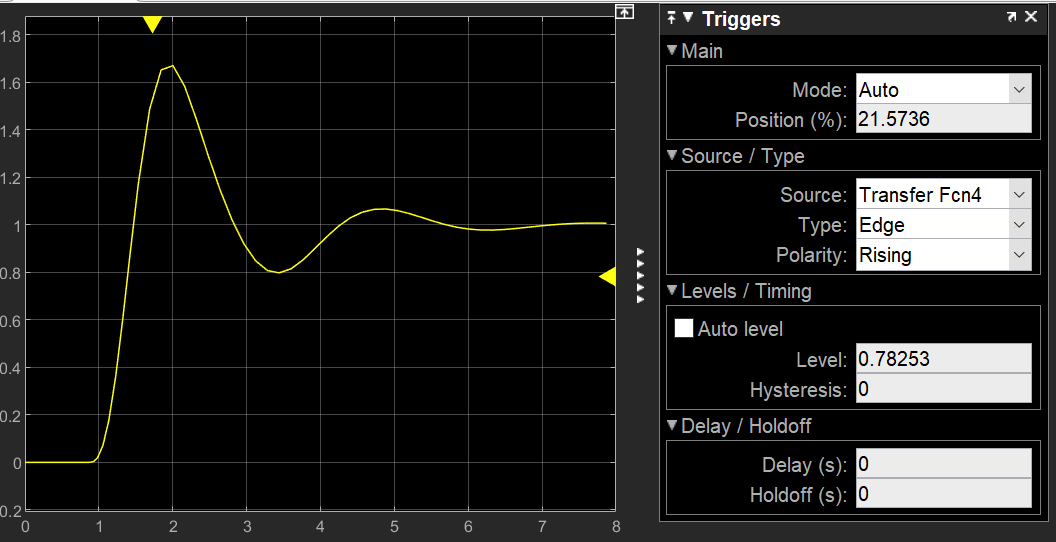 Рисунок 6 – Реакция системы без ОС Выводы В ходе лабораторной работы были рассчитаны параметры для моделирования САУ углом тангажа самолета, смоделированы САУ углом тангажа в среде разработки Simulink. Результаты аналитической части представлены в пункте 3. Для статической САУ с ОС после моделирования получил следующие результаты: установившееся значение = 1,015 ± 0.051;  ; ;превышение максимума над установленным отсутствует; колебания отсутствуют, поэтому время затухания отсутствует; статическая ошибка 1,015 -1=0,015. Для статической САУ без ОС: установившееся значение = 1,015 ± 0.051;  ; ;превышение максимума над установленным значением 1,129-1,015=0,114 на 11 %;  8; 8;статическая ошибка 1,015 -1=0,015. Для статической САУ обратная связь – играет небольшую роль, так как каждому положению исполнительного органа соответствует определенное значение регулируемого параметра. Для астатической САУ с ОС: установившееся значение= 1 ± 0,1;  превышение максимума над установленным значением отсутствует; колебания отсутствуют, поэтому время затухания отсутствует; статическая ошибка = 0. Для астатической САУ без ОС: установившееся значение = 1,015 ± 0.051;  ; ;превышение максимума над установленным значением 1,67 -1,015=0,655 на 64 %; статическая ошибка 1,015 - 1=0,015. |