Раздел
|
Робототехника
|
ФИО педагога
|
Масалимова А.А
|
Дата
|
12.12.2022
|
Класс 4в
|
Количество присутствующих:
|
отсутствующих:
|
Тема урока
|
Кегль-ринг
|
Цели обучения, которые достигаются на данном уроке (ссылка на учебную программу)
|
4.5.1.1использовать датчик цвета
4.5.1.2 использовать датчик ультра звука
|
Цель урока
|
Использовать датчики цвета и ультразвука при программировании робота для соревнований по кегль-рингу
|
Критерии успеха
|
Подключает к базовой конструкции робота моторы, датчики цвета и ультразвука
Составляет словесный алгоритм обнаружения одной кегли
Завершает создание программы для полного решения задачи
Вносит необходимые изменения в конструкцию робота
Загружает и тестирует программу
|
Ход урока
|
Этапы урока
|
Деятельность учителя
|
Деятельность обучающихся
|
Оценивание
|
Ресурсы
|
Организационный этап
|
Приветствие. Психологический настрой.
Объединение в 3 группы, стратегия «Деление по качествам».
Учитель приглашает выйти к доске 3х (или более, это количество соответствует количеству групп) учащихся, обладающих по их мнениюназванным учителем качеством.
Например, учащихся нужно объединить в 3 группы. Сначала учитель вызывает 3-х самых смелых участников. В дальнейшем они будут капитанами. Они встают спиной к классу. За капитанами в шеренгу встают «самые внимательные». За спинами «внимательных» встают «самые умные», «самые быстрые», «самые креативные» и т.д. Последняя тройкаучащихся – это«самые осторожные». Им можно предложить самостоятельно выбрать группу, в которой они хотят работать.
Таким образом будут сформирвоаны группы с разными качествами учащихся. На этом учитель может сделать особый акцент. Так как преимущественной формой работы на данном уроке будет групповая работа. И именно разные качества учащихся в одной группе будут способствовать самому лучшему достижению результата.
Переход к теме и целямурока
Учитель просит вспомнить что изучалось на прошлом уроке и какова же будет тема и цель этого урока. Учащиеся озвучивают, учитель подтверждает и корректирует при необходимости.
|
Показывают решения задач, при возникновении вопросов разбирают с учителем
|
|
Диалогическое обучение
Саморегулируемое обучение
Критическое мышление
|
Изучение нового материала
|
Практическая работа
Из отобранных на предыдущем уроке деталей учитель предлагает для каждой группы базовую конструкцию робота-тележки.
Учитель демонстрирует конструкциюробота-тележки и напоминает, что она содержит:
Два больших мотора, для того чтобы мы смогли научить нашего робота поворачивать.
Два ведущих колеса, на которые будут передаваться усилия моторов.
Одно свободно вращающееся колесо или шаровая опора, которая будет придавать устойчивость роботу.
Один главный блок EV3, который будет хранить и выполнять нашу программу.
Детали для придания роботу законченного вида.
Задание 1: Сборка робота. Групповая работа
Завершить сборку конструкции робота для кегль-ринга. Для этого подключить моторы и датчики к модулю EV3:
левый мотор - к порту "B"
правый мотор - к порту "C"
ультразвуковой датчик - к порту "2"
датчик цвета - к порту "3".
ФО. Самооценивание и оценивание учителем критерия 1 в листе оценивания.
Изучение нового материала.
После сборки робота разработаем алгоритмдля обнаружения одной кегли.
Задание 2: Разработка алгоритма. Индивидуальная работа
Вспомните все действия робота для соревнований по кегль-рингу, которые мы узнали на прошлом уроке. Восстановите алгоритм обнаружения одной кегли, расположив команды в правильном порядке.
Учитель заранее в браузере открывает ссылку на ресурс в мультимедийной среде Learningapps.
Альтернативный вариант задания – приотсутствии сети Интернет, использовать в качестве ресурса карточки с командами алгоритма.
Верный вариант алгоритма:
вращаться вокруг своей оси по часовой стрелке, пока датчик не обнаружит кеглю;
остановиться напротив кегли;
двигаться вперед, пока датчик цвета не обнаружит черную границу поля;
остановиться;
двигаться назад в центр поля.
Дифференциация. Во время выполнения задания по восстановлению алгоритма капитанам команд можно предложить просмотреть видео, чтобы четко вспомнить правила соревнований по кегль-рингу. Учитель заранее не говорит с какой целью предлагает это видео. В действительности же, просмотр видео поможет им эффективнее провести физминутку в своих группах.
ФО.Самооценивание и оценивание учителем критерия 2 в листе оценивания.
Физминутка.Учитель предлагает смоделировать соревнования по кегль-рингу, в которых учащиеся групп будут исполнять роль робота и кеглей, капитаны управляют роботами, подавая им команды.
Практическая работа
Задание 3: Программирование робота
Ознакомьтесь с инструкцией по программированию робота. Назовите основные шаги программирования.
Научим нашего робота обнаруживать кеглю и останавливаться точно напротив.
Запрограммируем нахождение кегли роботом с использованием датчика ультразвука
Программируем движение вперед и остановку при пересечении черной линии
Доработка конструкции робота – прикрепление клешни
Программируем возвращение робота в центр круга
Программируем цикл для выталкивания всех кеглей.
Выполните шаги 1-3.Они позволят обнаружить кеглю и вытолкнуть ее за пределы ринга.
Дифференциация. Учащиеся, выполнившие шаги 1-3 раньше, чем другие могут выполнить шаги 4-6 Эти шаги позволят решить задачу полностью.
Соревнования групп по кегль-рингу.
Представители групп демонстрируют работу своих роботов. Остальные учащиеся наблюдают, дают обратную связь.
ФО. Самооценивание и оценивание учителем критериев 3, 4, 5 в листе оценивания.
Обсуждение с учащимися следующих вопросов:
Влияет ли и каким образом расположение датчиков на решение задачи?
Какая конструкция была наиболее удачной и почему?
В какой жизненной ситуации можно использовать подобную задачу для робота
Задание 1: Сборка робота. Групповая работа
Завершить сборку конструкции робота для кегль-ринга.
Два больших мотора, для того чтобы мы смогли научить нашего робота поворачивать
Два ведущих колеса, на которые будут передаваться усилия моторов.
Одно свободно вращающееся колесо или шаровая опора, которая будет придавать устойчивость нашему роботу.
Один главный блок EV3, который будет хранить и выполнять нашу программу.
Детали для придания конструкции законченного вида.
В процессе сборки конструкции робота для кегль-ринга подключите моторы и датчики к модулю EV3: левый мотор - к порту "B", правый мотор - к порту "C", ультразвуковой или инфракрасный датчик - к порту "2", датчик цвета - к порту "3".
https://robot-help.ru/lessons/lesson-1.html
Ресурс 2.
Задание 2: Разработка алгоритма. Индивидуальная работа
Вспомните все действия робота для соревнований по кегль-рингу, которые мы узнали на прошлом уроке. Восстановите алгоритм обнаружения одной кегли, расположив команды в правильном порядке.
Отдельное задание для капитанов. Просмотрите любое видео из предложенных ниже. Это Вам поможет четко вспомнить правила соревнований по кегль-рингу, что будет полезно в выполнении следующего задания.
Ссылки на видео:
https://www.youtube.com/watch?v=hnpxFeApOYU
Ресурс 3. Альтернативный вариант ресурса к заданию 2
вращаться вокруг своей оси по часовой стрелке, пока датчик не обнаружит кеглю;
|
двигаться вперед, пока датчик цвета не обнаружит черную границу поля;
|
остановиться напротив кегли;
|
остановиться;
|
|
двигаться назад в центр поля.
|
Ресурс 4.
Задание 3: Программирование робота. Групповая работа
Ознакомьтесь с инструкцией по программированию робота.
Основные шаги программирования нашего робота:
Научим нашего робота обнаруживать кеглю и останавливаться точно напротив.
Запрограммируем нахождение кегли роботом с использованием датчика ультразвука
Программируем движение вперед и остановку при пересечении черной линии
Доработка конструкции робота – прикрепление клешни
Программируем возвращение робота в центр круга
Программируем цикл для выталкивания всех кеглей.
Выполните шаги 1-3. Они позволят обнаружить кеглю и вытолкнуть ее за пределы ринга.
Научим нашего робота обнаруживать кеглю и останавливаться точно напротив.
Сначала необходимо выбрать пороговое значение для обнаружения кегли напротив нашего робота. Для этого:
загрузим среду программирования,
создадим новый проект - "lessons-1",
новую программу в проекте назовем "lesson-11".
подключим робота к среде программирования
установим его точно в центр поля, поставим напротив робота кеглю
На "Странице аппаратных средств", находящейся в правом нижнем углу среды программирования, выберем вкладку "Представление порта" (Рис. 1, поз. 1) и снимем показание датчика, определяющего расстояние до кегли, установив соответствующий режим отображения показаний.Ультразвуковой датчик в режиме "Расстояние в сантиметрах" показывает значение - 25,9 (Рис. 1 поз. 2).

Рис. 1
Запрограммируем нахождение кегли роботом с использованием датчика ультразвука
Для того, чтобы заставить робота вращаться вокруг своей оси, воспользуемся программным блоком "Независимое управление моторами" "Зеленой палитры", Режим работы блока установим "Включить", значение мощности для порта "B" установим равным 30, значение мощности для порта "C" установим равным -30 (Рис. 2 поз.1),
Для поиска кегли используем программный блок "Ожидание" "Оранжевой палитры" в режиме "Ультразвуковой датчик - Сравнение - Расстояние в сантиметрах". Для гарантированного нахождения увеличим пороговое значение срабатывания датчика до 35 (Рис. 2 поз. 2)
После того, как робот окажется напротив кегли, используя программный блок "Независимое управление моторами" "Зеленой палитры" выключим моторы (Рис. 2 поз. 3).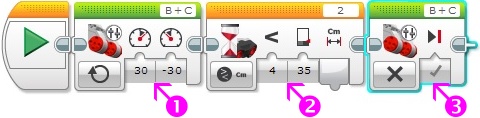
Рис.2
Загрузим программу в робота и запустим её на выполнение. Робот может останавливаться не совсем точно напротив банки. Связано это с тем, что датчик может обнаруживать предмет не только строго напротив себя, но и на некотором отклонении от направления взгляда датчика. В этом случае можно после остановки робота довернуть его на необходимый угол, используя дополнительный блок "Независимое управление моторами" или постепенно увеличивать скорость вращения, подбирая параметр мощность (Рис. 2, поз. 1), пока робот не станет останавливаться точно напротив кегли. Может потребоваться увеличить мощность до 50 единиц для робота, собранного из образовательной версии набора, и до 40 единиц для робота, собранного из домашней версии набора.
Программируем движениевперед и остановку при пересечении черной линии
Установим робота таким образом, чтобы датчик цвета находился точно над черной границей поля и измерим его значение в режиме "Яркость отраженного света" любым удобным вам способом, рассмотренным выше. Например, получилось 7. В качестве порогового значения примем число 10.
Добавим к нашей программе обнаружения кегли следующие программные блоки:
Для того, чтобы заставить робота двигаться прямолинейно, воспользуемся программным блоком "Рулевое управление" "Зеленой палитры". Режим работы блока установим "Включить", параметр "Рулевое управление " = 0, параметр "Мощность" = 50. (Рис. 3 поз. 1)
Для поиска датчиком цвета черной границы воспользуемся программным блоком "Ожидание""Оранжевой палитры" в режиме "Датчик цвета - Сравнение - Яркость отраженного сигнала", параметр "Тип сравнения" = 4, параметр "Пороговое значение" = 10. (Рис. 3 поз. 2)
После того, как робот пересечет черную линию, используя программный блок "Рулевое управление""Зеленой палитры" выключим моторы (Рис. 3 поз. 3).

Рис. 3
Итак, робот обнаруживает кеглю и вместе с ней движется за пределы ринга!
Но как же сделать захват кегли? И что с остальными кеглями?
Если вы выполнили шаги 1-3 раньше, чем другие, то приступайте к выполнению шагов 4-6.
Эти шаги позволят решить задачу полностью.
Доработка конструкции робота – прикрепление клешни
Наш робот успешно находит и выталкивает кеглю, но текущая конструкция не позволяет роботу её фиксировать при транспортировке за пределы поля.
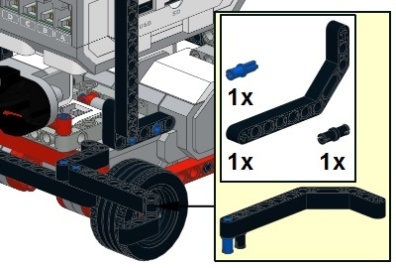
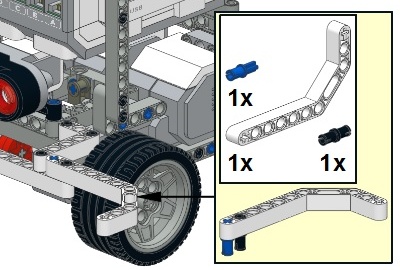
На переднем бампере робота слева и справа закрепите детали, как показано на рисунках ниже:
Lego mindstorms EV3 HomeLego mindstorms EV3 Education
Теперь наш робот просто отлично справляется со своей работой! Осталось только научить его возвращаться в центр круга.
Программируем возвращение робота в центр круга
"Страница аппаратных средств" позволяет нам наблюдать не только текущие показания датчиков, но и накопленные показания датчика вращения мотора (Рис. 4 поз. 1). Нажав, на значок мотора, мы можем установить предпочтительный нам вывод информации о вращении мотора в "Оборотах" или "Градусах" (Рис. 4 поз. 2).
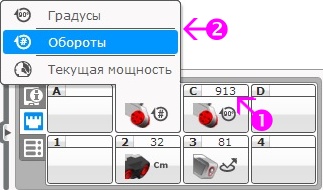
Рис. 4
Программный блок "Вращение мотора" "Желтой палитры" позволяет получать и обрабатывать это значение в программе. Режим "Сброс" программного блока "Вращение мотора" устанавливает нулевое значение датчика и отсчет оборотов начинается сначала. (Рис. 5)
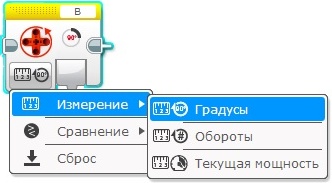
Рис. 5
Воспользуемся этими возможностями: если мы сбросим показание одного из датчиков моторов в 0 (в данном случае можно обнулить значение любого из моторов "B" и "C", ведь робот поедет прямо, а значит оба колеса провернутся на одинаковое значение), то после остановки робота над черной линией, можно будет получить значение датчика в "Градусах" или "Оборотах" и, подав его на вход соответствующего параметра блока "Рулевое управление", заставить робота проехать точно такое же расстояние. А для того, чтобы робот двигался назад, необходимо изменить значение параметра "Мощность" на отрицательное значение.
Перед началом движения вперед сбросим в 0 показания датчика вращения мотора, подключенного к порту "B" (Рис. 6 поз. 1).
После остановки на черной границе поля считаем расстояние, пройденное мотором "B" в градусах (Рис. 6 поз. 1).
Полученное значение подадим в параметр "Градусы" программного блока "Рулевое управление", значение параметра "Мощность" = -50 (Рис. 6 поз. 1)

Рис. 6
Загрузим получившуюся программу в робота и убедимся, что робот нашел кеглю, вытолкал её за пределы поля и вернулся в центр поля.
Программируем цикл для выталкивания всех кеглей
Чтобы заставить робота выталкивать требуемое количество кеглей, все программные блоки поместим внутрь программного блока "Цикл" "Оранжевой палитры".
Режим программного блока "Цикл" установим в значение "Подсчет", параметр "Подсчет" установим равным количеству кеглей (Рис. 7, 8 поз. 1)
Для удобства отображения на экране программа оформлена в две строки - вы можете сложить её в одну строку.
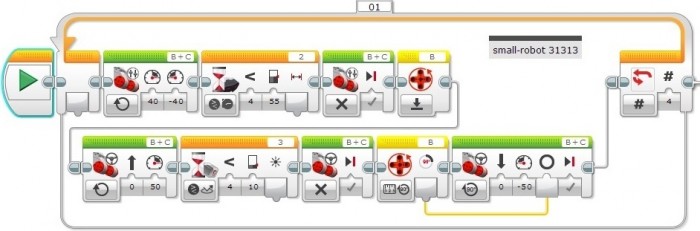
Рис. 7
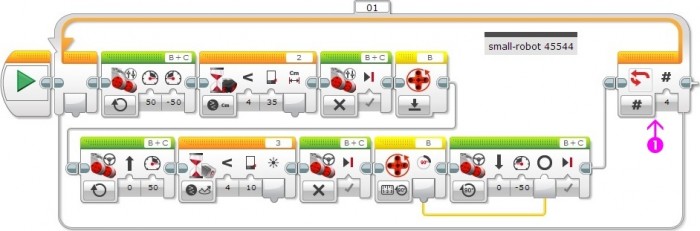
Рис. 8
Программа готова!
|
Анализируют правило 1-3
Ознакамливаются с методами решения
Разбирают совместно с учителем понятие
|
Словесная оценка учителя
. Взаимооценивание
Стратегия«Стикер
|
Критическое мышление.
Саморегулируемое обучение (самонаправленность в процессе работы над заданиями).
|
Рефлексия
|
Дифференцированное домашнее задание.
Рефлексия.
Метод «Светофор+Парковка».
Учитель предлагает ученикам установить по результатам их работы степень достижения ими учебной цели и приобретение уверенности в своих знаниях.
• Зеленый – цели достигнуты, уверенно движутся вперед.
• Желтый – частичная динамика, достигнуты отдельные элементы успеха, не достаточная степень уверенности, обращаются за советом, помощью.
• Красный – цели не достигнуты, находятся в замешательстве, о чем ставят в известность учителя.
Учащиеся, которые подняли стикеры желтого и красного цвета пишут на них свои фамилии и отражают моменты, вызвавшие затруднения.
(Активный метод – способствует формированию навыков мышления, оценивания, анализа).
|
Учащиеся подытоживают свои знания по изучаемой теме.
|
|
| |
 Скачать 380.71 Kb.
Скачать 380.71 Kb.