2_Учебное пособие. 2_Учебное пособие doc. Конспект лекций для 1 семестра изучения курса Физика I. Механика и элементы специальной теории относительности 1
 Скачать 3.78 Mb. Скачать 3.78 Mb.
|

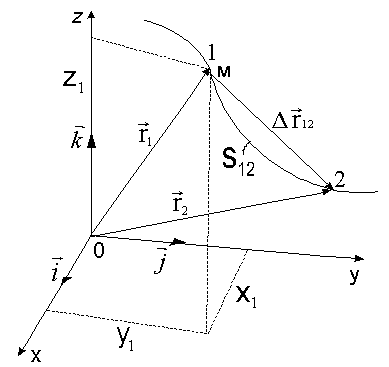
МЕХАНИКА, МОЛЕКУЛЯРНАЯ ФИЗИКА И ТЕРМОДИНАМИКАКонспект лекций для 1 семестра изучения курса «Физика»I. МЕХАНИКА И ЭЛЕМЕНТЫ СПЕЦИАЛЬНОЙ ТЕОРИИ ОТНОСИТЕЛЬНОСТИ 1. Кинематика поступательного и вращательного движений материальной точки Механическим движением тел называют изменение их положения (или положения их частей) в пространстве с течением времени. В основе классической механики лежат законы Ньютона. Кинематика изучает механическое движение с геометрической точки зрения и не рассматривает причины, вызывающие это движение. В механике рассматривается движение таких объектов, как материальная точка и абсолютно твердое тело. Материальной точкой называется тело, размерами которого в данных условиях можно пренебречь. Абсолютно твёрдым телом называется тело, деформацией которого в данных условиях можно пренебречь. Абсолютно твёрдое тело можно рассматривать как систему материальных точек, жестко связанных между собой. 1.1. Кинематические характеристики движения материальной точки Описать движение материальной точки – значит знать ее положение относительно выбранной системы отсчета в любой момент времени. Системой отсчёта называется система координат, связанная с телом отсчёта и снабжённая синхронизированными часами. Наиболее часто используется прямоугольная декартова система координат (рис. 1).
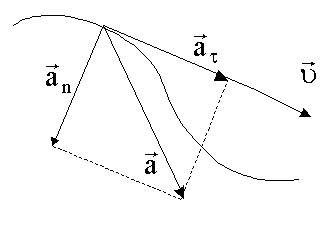
Данные уравнения являются кинематическими уравнениями движения материальной точки, или законом движения точки. В процессе движения конец радиуса-вектора, связанный с точкой, описывает в пространстве кривую, называемую траекторией движения материальной точки. В зависимости от формы траектории различают прямолинейное и криволинейное движения. Перемещением материальной точки называют вектор, проведённый из начальной точки в конечную точку траектории (рис. 1): Вектор Модуль вектора перемещения можно определить следующим образом: Путь материальной точки S12 это длина траектории. Скорость векторная физическая величина, характеризующая быстроту изменения положения тела в пространстве, равная перемещению тела за единицу времени. Различают среднюю и мгновенную скорости. Вектор средней скорости направлен так же, как и вектор перемещения В декартовой системе координат скорость можно представить через её проекции на оси: Модуль скорости может быть найден по следующей формуле: При рассмотрении движения тела относительно двух различных инерциальных систем отсчета используют классический закон сложения скоростей: скорость тела относительно неподвижной системы отсчета Ускорение векторная физическая величина, характеризующая быстроту изменения скорости с течением времени, равная приращению скорости за единицу времени. Различают среднее и мгновенное ускорения. Вектор ускорения может быть представлен через его проекции на координатные оси: где Модуль ускорения можно определить следующим образом: 1.2. Тангенциальная и нормальная составляющие ускорения Часто используется представление ускорения через две составляющие: тангенциальное и нормальное ускорения (рис. 2):
Тангенциальное ускорение характеризует изменение скорости по модулю (величине) и направлено по касательной к траектории: где Нормальное ускорение характеризует изменение скорости по направлению и направлено по радиусу кривизны к центру кривизны траектории в данной точке: где R радиус кривизны траектории, Модуль вектора ускорения может быть найден по формуле 1.3. Основная задача кинематики Основная задача кинематики заключается в нахождении закона движения материальной точки. Для этого используются следующие соотношения:  ; ;  ; ;  . .Частные случаи прямолинейного движения: 1) равномерное прямолинейное движение: 2) равнопеременное прямолинейное движение: 1.4. Вращательное движение и его кинематические характеристики При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. Для характеристики вращательного движения вводятся следующие кинематические характеристики (рис. 3). Угловое перемещение Рис.3 Угловая скорость П 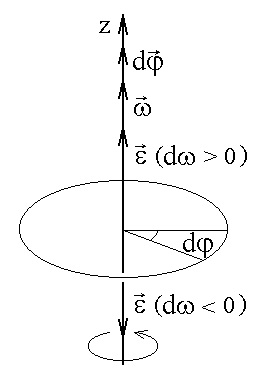 ри вращательном движении справедливы следующие формулы: ри вращательном движении справедливы следующие формулы:Угловое ускорение Зависимость При равномерном вращении: = 0, = const, = t. При равнопеременном вращении: = const, Рис. 3 Для характеристики равномерного вращательного движения используются период вращения и частота вращения. Период вращения Т – время одного оборота тела, вращающегося с постоянной угловой скоростью. Частота вращения – количество оборотов, совершаемых телом за единицу времени. Угловая скорость может быть выражена следующим образом: Связь между угловыми и линейными кинематическими характеристиками (рис. 4): 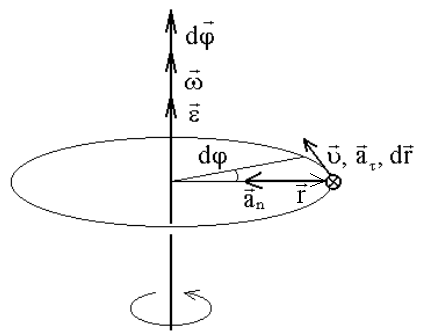  Рис. 4 2. Динамика поступательного и вращательного движений |