Летные испытания. Конспект лекций Лекция 1
 Скачать 3.06 Mb. Скачать 3.06 Mb.
|

|
4. Рулежки, пробежки, подлеты, первый вылет. На этом этапе за самолет берется летчик, раньше он присутствует только как зритель и ученик, поэтому это уже летные испытания, хотя самолет может не отрываться от земли. Цели рулежек и пробежек: - оценка управляемости и устойчивости при движении самолета по земле; - оценка ходов и усилий рычагов, необходимых для поднятия носового (хвостового) колеса и при разбеге и пробеге на скоростях, близких к посадочным; - работа силовой установки, системы управления, системы торможения и др.; - оценка характера вибраций конструкции и оборудования при движении по земле; - освоение экипажем ЛА. Цели подлетов: - оценка управляемости и устойчивости самолета в полете после отрыва и перед посадкой; - оценка ходов и усилий рычагов, необходимых для отрыва самолета и на последних этапах захода на посадку (конец снижения, выравнивание, выдерживание); - оценка скоростей отрыва и касания. - оценка нагрузок на конструкцию и оборудования при касании; - освоение экипажем ЛА. Цель первого вылета: - качественная оценка устойчивости и управляемости на всех этапах полета; - качественная оценка работоспособности силовой установки, систем и оборудования ЛА; - освоение летчиком ЛА. Особенности: - полет выполняется в простых метеоусловиях; - полет выполняется минимальным экипажем; - полет выполняется с неполной взлетной массой; - продолжительность полета и объем проверок невелики; - запрещены выходы на крайние значения всех параметров (скорости, высоты перегрузки, углов атаки, скольжения, крена, отклонения поверхностей, РРД); - взлет и посадка на повышенной скорости; - часто применяют самолет сопровождения. Лекция 4. Летные испытания. Номенклатура скоростей и высот полета. Определение воздушной скорости и барометрической высоты. Аэродинамическая поправка к скорости и высоте. Определение а/д поправок в ЛИ. Поправка на запаздывание. Инструментальная поправка. Определение путевой скорости и геометрической высоты полета. (Лирическое вступление) Самолет летает по воздуху, и его характеристики зависят от скорости и высоты полета относительно воздуха. Но он выполняет полет между точками земной поверхности, обычно, за заданный промежуток времени. Поэтому в авиации важно знать скорости и высоты как относительно земной поверхности, так и относительно воздуха. Высота полета бывает: - геометрическая; - барометрическая по стандартному давлению; - барометрическая по давлению места (заданного места земной поверхности). Скорость бывает земная (относительно поверхности земли) и воздушная (относительно воздуха. Воздушная скорость бывает: - истинная (TAS), - индикаторная (EAS), - индикаторная земная (CAS), - приборная исправленная, - приборная (IAS). Определение воздушной скорости и барометрической высоты. Определение воздушной скорости и барометрической высоты в полете выполняется при помощи приемника воздушного давления (рис. ). 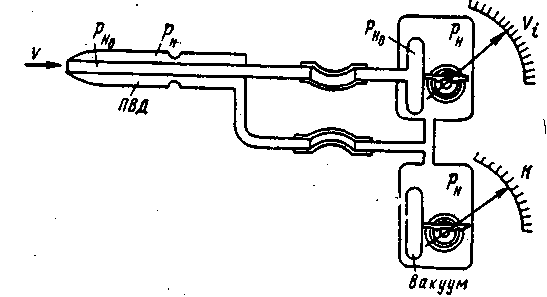 (объяснить устройство) Рно — полный напор; Рн — статическое давление. Принцип измерения основан на уравнении Бернулли Где —массовая плотность воздуха на высоте Н. 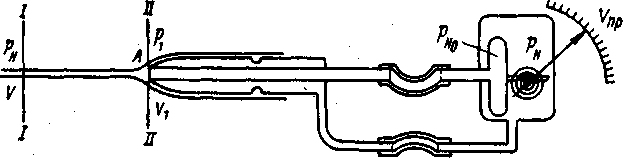 Поток не может протекать через внутреннюю трубку, так как она с другого конца подсоединена к измерительному элементу. Следовательно, точка на конце ПВД— критическая точка, в которой струйка при обтекании ПВД разветвляется, и скорость в этой точке равна нулю. Тогда разность давлений, действующих на измерительный элемент, Следовательно, замеренная указателем скорости величина перепада давлений рпредставляет собой скоростной напор набегающего потока q. Из уравнения (3. 3) видно, что скорость самолета неоднозначно связана со скоростным напором q, так как в это уравнение, кроме самой скорости, входит плотность воздуха h, изменяющаяся с высотой. Если бы плотность воздуха не изменялась, то шкалу указателя скорости было бы легко проградуировать по скорости. Выйти из такого положения можно следующим образом. Выражение (3.3) можно представить в виде  (3-4), где (3-4), где – относительная плотность, а комплекс – относительная плотность, а комплекс – индикаторная скорость – индикаторная скоростьВ формуле (3.4) между индикаторной скоростью Vtи скоростным напором qсуществует однозначная зависимость. По этой формуле и градуируется шкала прибора по индикаторной скорости, физический смысл которой заключается в следующем: это скорость, которая была бы при том же скоростном напоре (фактическом) в случае Р=0, т. е. «у земли», в условиях стандартной атмосферы. Истинная скорость полета определяется следующим выражением:  (3.5) (3.5)Но, известно, что формула Бернулли в виде (3.1) применима для несжимаемого газа, каковым он может считаться до 200 – 400 км/ч. При больших скоростях плотность зависит не только от высоты, но и от скорости. При наличии сжимаемости энергия набегающего потока в т.А будет расходоваться не только на создание скоростного напора, но и на сжатие воздуха. В случае сжимаемого (если в потоке нет скачков уплотнения) потока для определения давления в критической точке ПВД пользуются уравнением, теплосодержания.  (3.7) Из уравнения (3.7) видно, что показания прибора, определяемые величиной qCЖ:, не могут быть выражены через скорость, так как в данном случае скорость зависит не только от qCЖ, но и от плотности ни давления рн. Неоднозначность не устраняется и в случае перехода от истинной скорости Vк индикаторной Vi, так как в уравнении еще остается переменная величина рн.  (3.8) (3.8)Для сверхзвукового потока эта зависимость получается из формулы Релея для перепада давления на прямом скачке уплотнения и выглядит следующим образом  Неоднозначность здесь тоже не устраняется Для проведения градуировки шкалы указателя скорости нужно, очевидно, задаться определенным значением рн. Наиболее удобно выбрать «земное» давление рн=Ро=760 мм рт. ст. Индикаторная скорость, определенная при этом значении рнпо перепаду qCЖ, называется индикаторной земной скоростью Vi3 . Тарировка указателя скорости ведется по выражению  qCЖ = Разность Выясним физическую сущность этой поправки. Как было отмечено выше, скоростной напор, действующий на чувствительный элемент указателя скорости, определяют исходя из зависимости (3.7, 3.9), учитывающей сжимаемость воздуха при рн=ро С увеличением высоты давление рн уменьшается, а число М увеличивается. При одном и.том же значении Vi величина М растет с уменьшением рн. Увеличение числа М по сравнению с его значением при Рн=Ро, естественно, приведет к дополнительному, не учтенному уравнением (3.7) сжатию воздуха на входе в приемник воздушного давления. Таким образом поправка на сжимаемость выражает по существу лишь разность между поправками на сжимаемость при полете на одной и той же скорости V[3на высоте, соответствующей давлению рн и на уровне моря р0. Величины поправок на сжимаемостьдля разных значений Vl3и Нропределяются аналитически и могут быть представлены в виде графической зависимости (рис. 3. 3). Величина поправки на сжимаемость при Рн<Ро всегда отрицательна. Следовательно, скорость Vl3, определенная по шкале прибора, больше индикаторной скорости Vi. Поправка на сжимаемость исправляет неправильную «интерпретацию» ПВД полного давления. Статическое давление воспринимается правильно. Вследствие этого поправку на сжимаемость в показания высотомера не вводится. 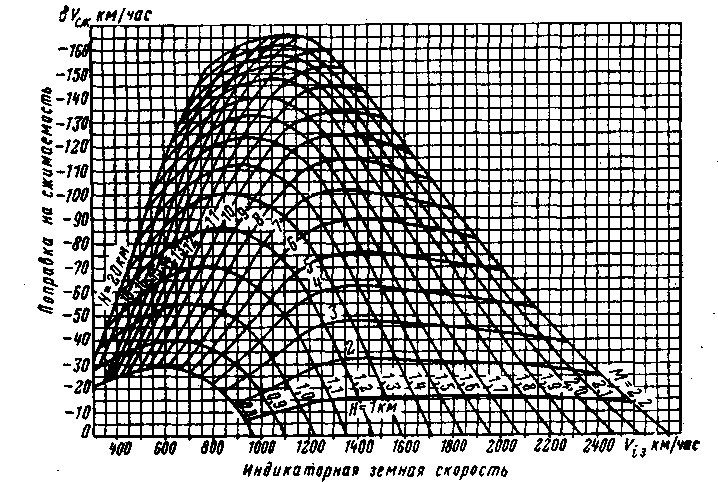 Рис.3.3 Аэродинамическая поправка к скорости и высоте. ПВД воспринимает полное и статическое давление в зоне своих отверстий. Конструкция и внешние формы ПВД и расположение в нем отверстий отрабатываются таким образом, что он воспринимает полное и статическое давление без искажений. Так происходит до местных углов атаки ПВД 10 – 15° (значения могут быть разные для разных ПВД). На больших углах атаки критическая точка, в которой V=0 и р=р0 располагается уже не на центральном отверстии. Т.о. в полость полного давления попадает уже не полное давление и показания скорости искажаются. Для исключения влияния местного угла атаки (и скольжения) на восприятие статического давления делают несколько отверстий для него в одном поперечном сечении. Но ПВД устанавливается на самолете и на д/з скоростях находится в зоне возмущенного потока от самолета. Т.к. возмущения простираются на несколько метров впереди и в стороны самолета и на десятки-сотни метров позади него, вынести ПВД в невозмущенный поток практически невозможно. В возмущенном потоке полное давление не изменяется и воспринимается ПВД без погрешностей на эксплуатационных углах атаки. Также полное давление может искажаться на с/з, если ПВД расположен после косого скачка уплотнения от носа самолета. Т.к. погрешность имеет место только в статическом давлении, необходимо вносить поправки в показания и высоты, и скорости. Примечание: поправки равны погрешностям с противоположным знаком. Эти поправки связаны между собой теоретическими зависимостями.  В справочниках эти зависимости обычно представлены в виде графиков. 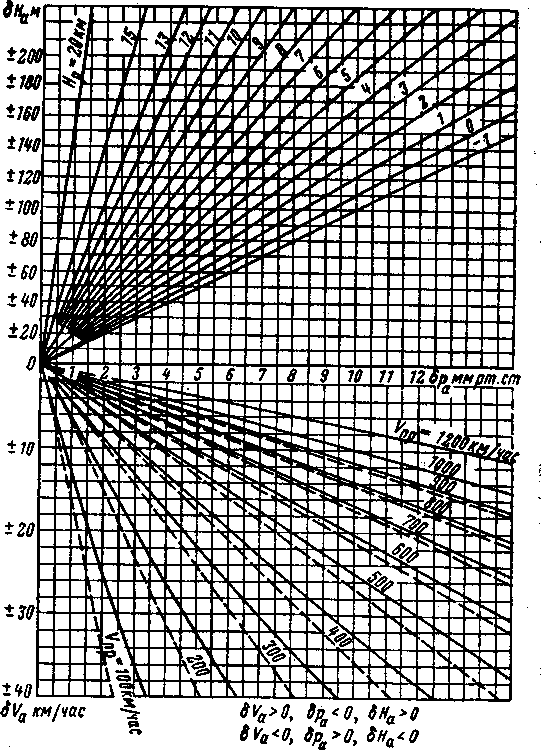 Рис. 3.6. Номограмма для определения поправок Vaи На Величины и характер изменения а/д поправок индивидуален для каждого типа ЛА. У самолетов схожей а/д компоновкой и местом расположения ПВД поправки могут быть похожи, что не отменяет обязательности их определения. При носовом расположении ПВД поправка на с/з обычно =0. Традиционно стараются минимизировать аэродинамические поправки. Для этого ПВД располагают в таком месте, где влияние крыла или фюзеляжа будет наименьшим, стараются исключить влияние двигателя, особенно воздушного винта. При необходимости статический насадок даже можно отделять от динамического. Часто в качестве статического приемника используются отверстия на боковой поверхности фюзеляжа. Место расположения таких отверстий определяется по данным продувок модели самолета в аэродинамической трубе. На с/з самолетах ПВД ставят в носу для исключения влияния головного скачка уплотнения. В АП-23 и АП-25 поправки нормированы: по скорости не более 3% или 9 км/ч (1/2 узла), по высоте не более ±9 м (30 футов) на каждые 185 км/ч (100 узлов). Но есть и другая тенденция. ПВД на носовом обтекателе РЛС самолета вносит помехи в показания РЛС, он также является хорошим радиолокационным отражателем. Тогда их ставят в не самом удобном месте и смиряются с большими поправками. На современных самолетах их заносят в вычислители и приборы могут сразу показывать Viз, хотя и обозначать ее как приборная. Примеры: F-4, F-15, F-18, YF-22/F-22, YF-23. В ОТТ ВВС значения поправок не нормируются. Определение а/д поправок в ЛИ. Идея проста: приборные скорость и высота известны, необходимо каким-то образом определить барометрическую высоту полета и истинную воздушную скорость, пересчитав ее затем в Viз. Имеются 2 принципиальных способа определения барометрической высоты полета и истинной воздушной скорости: - непосредственный замер способом, исключающим а/д погрешности; - измерить скорость и высоту полета относительно земли (путевая скорость и геометрическая высота) и пересчитать их: в воздушную скорость с учетом ветра, в барометрическую высоту с учетом распределения давления. Т.к. а/д поправки к скорости и высоте взаимосвязаны, то определять можно только одну поправку, а другую получать пересчетом. Исходя из этого методы определения поправок делятся на барометрические и скоростные. К скоростным относятся: 1. полеты на мерной базе; вариант: полеты на мерной базе методом петель; 2. полет строем с эталонным самолетом; 3. полет с аэролагом (буксируемым ПВД); 4. полеты с внешнетраекторными измерениями Vпут: - кинотеодолитный, - радиолокационный, - фазовый, - спутниковый; 5. расчет Vист путем интегрирования перегрузок. К барометрическим относятся: 1. полет с эталонным самолетом; 2. полет с буксируемым приемником статического давления; 3. экспериментально-расчетный. Общие требования к порядку определения поправок. А/д поправки должны быть определены: - для эксплуатационного диапазона скоростей (от 1.3Vсв до Vmax) и высот полета для горизонтального полета (ny≈1), - на больших углах атаки вплоть до сваливания – желательно, - на взлете и посадке (с учетом влияния экрана) – на легких самолетах не обязательно. А/д поправки определяются для всех конфигураций ЛА. При наличии нескольких ПВД должны быть определены поправки к каждому. Поправки должны быть определены не менее чем на трех самолетах данного типа. Точность проведения летного эксперимента нормируется более жестко, чем в других случаях. Область применения разных способов в зависимости от их точности представлена на рис.   Скоростные методы точнее Барометрические методы точнее  Когда имеются погрешности полного давления необходимо определять поправки отдельно к скорости и высоте соответствующими методами, т.к. они не взаимосвязаны. Поправка на запаздывание. На установившихся режимах (при постоянных Н и V) Vпр и Viз отличаются только на а/д поправку. Но при изменении этих параметров появляется погрешность, вызванная запаздыванием. Физический смысл: протекание воздуха в каналах системы ПВД к воздушным камерам имеет небольшую скорость. Погрешность запаздывания увеличивается: - при увеличении объемов камер, - увеличения длины и уменьшения диаметра трубопроводов, - наличие тройников и изгибов в трубопроводах (увеличение гидравлического сопротивления). Практически погрешность запаздывания заметна при изменениях высоты (наборах и, особенно, снижениях), а при разгонах и торможениях ее нет. Это происходит по двум причинам: - ускорения при разгоне и торможении меньше, - запаздывание имеет место в статических камерах, т.к. объем динамических камер меньше, меньше их кол-во — меньше разветвлений. Поправку нужно определять и для высоты и для скорости. Определение поправки на запаздывание проводят на земле. В результате строится зависимость dpзап от высоты и Vy (изменение перепада давления) Затем по известным графикам можно определить dVзап dHзап. Инструментальная поправка/ погрешность. Инструментальная поправка учитывает технологические неточности при изготовлении конкретного прибора разрешенные допусками (неточности в размерах анероидных коробок и других деталей, различные жесткости мембран, люфты передаточного механизма) и определяется для каждого прибора индивидуально. Для определения величины инструментальной поправки каждый экземпляр указателя скорости и высотомера тарируется в лаборатории путем сравнения их показаний с показаниями эталонного манометра. К каждому экземпляру прибора прикладывается таблица или график инструментальных поправок. Это должно делаться регулярно. Датчики КЗА (как испытательной, так и штатной) обычно тарируются индивидуально, и инструментальная погрешность исключается. dVинстр= Vпр – Vпр испр. Определение путевой скорости и геометрической высоты полета. Необходимы при определении аэродинамических поправок, ВПХ, боевом применении , особенно по земле). В ЛИ используются следующие методы: - кинотеодолитный, - радиолокационный (обзорный и специальные измерительные локаторы), - фазовый, - применение самолетных навигационных систем (РСБН, СНС, радиовысотомер, ДИСС), - применение специальной спутниковой системы траекторных измерений (КБТИ, «Верхушка»). Итак, общие формулы, связывающие скорости и высоты, выглядят так: Vi= Vпр + δVинстр. + δVа + δVзап + δVсж   Нист= Нпр + δНинстр. + δНа + δНзап Нгеом= Нист + δНдня Определение числа М полета и температуры воздуха в полете. Число М полета можно определять следующими способами: А) по истинной скорости полета самолета относительно воздуха и температуре воздуха на высоте полета; Б) по индикаторной или земной индикаторной скорости полета самолета и атмосферному статическому давлению на высоте по лета; В) по отношению полного и статического давлений. Способ А. Если какими-либо методами измерены истинная скорость полета относительно воздуха Vи температура воздуха на высоте полета Тн, то число М просто определяется по известным формулам: (2.25) где Vв км/час. Способ Б. Подставляя значение скорости Vсогласно формуле (3.5), получим Если Viвыражено в км/час, а рнв мм рт. ст., то Если индикаторную скорость V; выразить через земную индикаторную скорость Vi3для М<1, пользуясь формулой (2.23), и для M≥l — равенством (2.24), из формулы (2.26) получим достаточно сложную зависимость числа М от Viaи рн. M = f (Vi3, рн). (2.27) Так как зависимость (2.27) имеет достаточно сложный вид, то на практике для определения числа М пользуются номограммой. По оси абсцисс откладываются значения земной индикаторной скорости Vi3, а по оси ординат — числа М (рис. 2.4). Параметром сетки кривой служит барометрическая высота. Способы А и Б применяются при послеполетной обработке, если число М в полете не пишется. 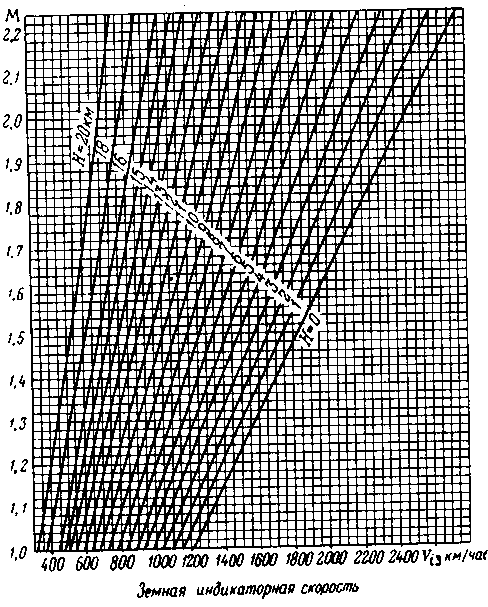 Рис. 2. 4. Номограмма для определения числа М Способ В. Для определения зависимости числа М от отношения полного и статического давления при М<1 преобразуем формулу (2.14), имея в виду, что рHо=pH + qсж, тогда получим Согласно формуле Релея отношение полного и статического давления при М≥1 равно Подставляя и =1,4, получим  (2. 28) Как видно из формул (2.28), число М является функцией отношения полного давления к статическому и не зависит от температуры воздуха. Этим способом определяется число М в полете (указатели М и датчики М). Датчики температуры определяют температуру торможения. Ее необходимо пересчитать по формуле: Т0=Тн(1+0,2М2) Лекция 5. Летные испытания. Определение летно-технических характеристик: максимальных скоростей полета, максимальных высот полета (практического потолка на различных режимах), характеристик набора высоты и снижения, характеристик расхода топлива на всех режимах полета. Приведение характеристик к стандартным или заданным условиям. Основные принципы теории подобия. Летно-технические характеристики включают в себя: - Максимальные скорости полета (максимальные достижимые скорости горизонтального полета) — (определение), не путать с максимально допустимыми скоростями полета - Максимальные высоты полета: Статический потолок — максимальная высота полета, на которой самолет может выполнять установившийся горизонтальный полет. На стат. потолке избыток тяги/мощности равен 0, Vy=0, никакой маневр невозможен, этот режим практически недостижим. Практический потолок — максимальная высота полета, на которой самолет может выполнять установившийся горизонтальный полет, имея при этом некоторый запас мощности. В нормативных документах условлено, что п.п. соответствует высоте, на которой для неманевренных самолетов Vy= 0,5м/с, для маневренных самолетов Vy=3м/с/ Область скоростей и высот полета. - Характеристики набора высоты: вертикальные скорости в наборе высоты во всем диапазоне скоростей и высот полета; наивыгоднейшие скорости набора высоты, критерии их определения, выбор режима набора высоты; расход топлива, время и путь в наборе. - характеристик снижения: выбор режима снижения; расход топлива, время и путь в снижении. - характеристик расхода топлива в горизонтальном полете. Приведение характеристик к стандартным или заданным условиям. ЛТХ зависят от: - Конфигурации ЛА - Веса ЛА - РРД - Внешних условий: давления и температуры. От влияния давления уходят тем, что все датчики тарируют и высотомеры устанавливают по стандартной атмосфере. Влияние отклонения по температуре надо учитывать. Метод дифференциальных поправок — выполнить идентичные режимы при разных значениях одного параметра и неизменных других параметрах. Тем самым определяется влияние изменений одного параметра на все характеристики. Метод наиболее полный и точный, но самый дорогой и трудоемкий. Использование теории подобия. Основные принципы теории подобия: заменить несколько влияющих параметров одним, представляющим их совокупность. При этом составляющие параметры представляют собой как характеристики объекта испытаний (ЛА), так и характеристики окружающей среды (воздуха) и выбираются таким образом, чтобы изменение параметра объекта можно было компенсировать изменением параметра среды, и наоборот. Примеры: Re=Vbср / М=V/a   Используется в летных и трубных испытаниях. Методы проведения испытаний. А) Определение Vmax выполняется методом горизонтальных прямолинейных разгонов на заданном РРД. Б) Перед определением потолка определяют наивыгоднейшие скорости набора высоты (это скорости, на которых самолет имеет максимальную скороподъемность — избыток тяги/мощности). Для этого надо определить значения Vy во всем диапазоне скор. И высот. Для этого выполняют Зубцы. (длительность ≈ 30сек). Снижение на зубцах используется для выбора оптимальных скоростей снижения. Можно использовать разгоны от минимальной до максимальной скорости. Основанием для этого служит известная зависимость:  . Этот способ имеет большую прозводительность, но точность его ниже. . Этот способ имеет большую прозводительность, но точность его ниже.Необходим перевод nx из связанной системы в скоростную. Наивыгоднейшие скорости н.в. не зависят от температуры и веса, их не надо приводить, а значения Vy и nx зависят. Для определения практического потолка и характеристик н.в. выполняют наборы высоты на выбранных режимах до практического потолка. Имеет смысл выполнять несколько наборов с одной конфигурацией при разных температурах (метод дифференциальных поправок). Наивыгоднейшие скорости снижения должны соответствовать требованию получения максимальной дальности полета в снижении при минимальном суммарном расходе топлива. В принципе возможен вариант, что при снижении на повышенных режимах суммарный расход топлива может быть меньше, чем на МГ, из-за меньшего времени снижения. На практике это случается редко, т.к. самолет выходит на ограничение по максимально допустимой скорости. На скорость (и режим) снижения могут накладываться дополнительные условия по планеру и системам: - скорость охлаждения планера от а/д нагрева (на малых высотах при тех же скоростях меньше число М —МиГ-31), - скорость изменения давления в кабине, если СКВ не справляется с ее поддержанием (это необходимо по физиологическим особенностям человека и этот параметр нормируется: ЛА для перевозки людей — 0,18 мм рт.ст./сек, боевые ЛА — 5 – 10 мм рт.ст./сек). - условия работы топливной системы и др. В одном случае необходим режим снижения с за минимальное время (с максимальной по модулю Vy) — это экстренное снижение при разгерметизации кабины или при необходимости срочной вынужденной (аварийной) посадки (потеря топлива, пожар). Режим экстренного снижения тоже должен быть определен в ЛИ. Характеристики расхода топлива и дальности полета определяются при помощи расходные площадок. Требования к ним: длительность 3-5 мин., РРД не изменять, точность выдерживания скорости ± 5км/ч не обязательно гнаться за заданным значением, главное, чтобы скорость была постоянна), высоты ±15м. (лучше выдерживать заданную высоту). Для компенсации потери веса из-за выработки топлива режимы делают с набором высоты (сохранение угла атаки) для поддержания постоянным приведенного веса. Влияние температуры чаще всего применяют метод дифф. поправок, для ТРД на малых и средних высотах (более простые зависимости) можно использовать теоретическую зависимость.  Полет на дальность. Техническая дальность. Практическая дальность. Лекция 6. Летные испытания. Понятие об устойчивости. Понятие об управляемости. Характеристики продольной устойчивости и управляемости самолета. Определение характеристик продольной устойчивости в ЛИ. 2.5.1.Понятие об устойчивости. Устойчивость — общесистемное понятие, это способность системы (объекта) самостоятельно сохранять свои свойства, параметры или состояние неизменными при внешних воздействиях. Равновесие — состояние системы, когда ее параметры не изменяются во времени. Существуют и неравновесные состояния. Возмущение — это воздействие на систему, стремящееся вывести ее из равновесного состояния. Т.о. устойчивость — способность системы (объекта) сохранять равновесное состояние при внешних возмущениях или приходить к нему из неравновесного состояния самостоятельно, т.е. без внешних управляющих воздействий. ПРИМЕЧАНИЕ: равновесие может быть статическим и динамическим. Понятие динамическое равновесие относится к процессам (это тоже разновидность систем). Летательный аппарат — это объект, а не процесс, поэтому мы рассматриваем только статическое равновесие. Соответственно, равновесное состояние, в котором система обладает свойством устойчивости, называется устойчивым равновесием. Состояния, в которых системы не обладают этим свойством можно разделить на: - неустойчивые состояния — при внешних возмущениях, даже при бесконечно малых, система выходит из равновесного состояния; - нейтральные (безразличные) состояния — при внешних возмущениях, даже при бесконечно малых, система переходит в новое состояние и остается в нем после прекращения воздействия возмущения. Равновесие м.б. устойчиво к воздействию одного возмущения, и неустойчиво к воздействию другого возмущения. Имеет смысл говорить об устойчивости по разным параметрам. Система может быть устойчива по одному параметру (при воздействии одного возмущения) и неустойчива по другому параметру. Поэтому, описывая характеристики устойчивости системы (в т.ч. самолета), необходимо указывать, для каких условий (состояний) и к каким воздействиям относятся описываемые характеристики устойчивости. Естественно, каждый тип систем имеет свой набор воздействий. Для самолета их 2: угол атаки (продольный канал, продольная устойчивость) и угол скольжения (боковой канал, боковая устойчивость). Пример: Самолёт с 4РВВ – АЕ в полётной конфигурации при задних центровках устойчив по перегрузке в продольном канале в диапазонах углов атаки 5° < м < 10° и м>20°. В диапазоне 0°< м<5° самолет нейтрален. С м 10° у самолёта так же появляется нейтральность, переходящая на м 13° в незначительную степень неустойчивости, которая пропадает на м >20°. При передней центровке самолет имеет нейтральность на м <5° и снижение запаса устойчивости, близкое к нейтральности, на м=10°÷20°. Во взлётной конфигурации самолет устойчив до углов атаки м= 10°. На м=10°÷20° самолет становится нейтральным, а на м=20°÷25° самолёт неустойчив. Уточнение про «бесконечно малые возмущения»: неустойчивое равновесие неустойчиво при всех возмущениях, даже при бесконечно малых. Устойчивое равновесие при малых возмущениях устойчиво. А что может быть при больших возмущениях? Может быть: - возврат в исходное состояние (как и при малых возм.), - переход в другое состояние: равновесное или неравновесное, - при очень больших возмущениях выход за границы существования системы и разрушение системы.  Можно продемонстрировать пример с параллелепипедом (с сумкой). Для самолета это может выглядеть так (на примере продольной устойчивости): - 1-ый вар. Понятен, прост и правилен: при случайном значительном изменении угла атаки самолет сам возвращается в исходное положение. - 2-ой вар. Самолет с «ложкой» может при одном положении РВ устойчиво лететь на двух разных углах атаки, имея при этом разную скорость и траекторию. Второй пример — более редкий, но и более неприятный: при неблагоприятных обстоятельствах (большой угол атаки и наличие скольжения) при случайном значительном увеличении угла атаки самолет может выйти на запредельные углы атаки и сорваться в штопор, который может быть устойчивым (при неизменном положении рулей). Можно при вести вариант со сваливанием пассажирских самолетов. - 3-ий вар. На больших скоростях при случайном значительном увеличении угла атаки возникающая при этом перегрузка превышает предельное значение, и самолет разрушается. В ЛА стараются реализовать первый вариант, а от третьего варианта уходят правильным выбором границ существования системы — прочностью самолета. Получается не всегда. Именно к большим и малым возмущениям относятся иногда встречающиеся понятия «устойчивость в большом» (большие возмущения) и «устойчивость в малом» (малые возмущения). Без «устойчивости в малом» нет «устойчивость в большом». Поэтому всегда предметом изучения и реализации является устойчивость при малых возмущениях, и только потом определяются или задаются предельные величины возмущений, на которые рассчитана система (самолет). Исходя из этого в изучении и реализации устойчивости имеются следующие методические приемы: вводятся понятия: Статическая устойчивость — это способность системы при воздействии на нее внешних малых возмущений порождать силы, стремящиеся вернуть ее в исходное равновесное состояние. Динамическая устойчивость — это не свойство, это описание процесса поведения системы при воздействии на нее внешних возмущений. Это не динамическое равновесие. Нет отдельных понятий или явлений: устойчивость, статическая устойчивость, динамическая устойчивость. Есть понятие устойчивости, и для того, чтобы система была устойчива, надо, чтобы при внешних малых возмущениях система порождала силы, стремящиеся вернуть ее в исходное равновесное состояние (выполнялся критерий статической устойчивости), и характеристики процесса возвращения в исходное состояние (характеристики динамической устойчивости) были приемлемыми. Виды изменения состояния системы при возмущении (на примере самолета). 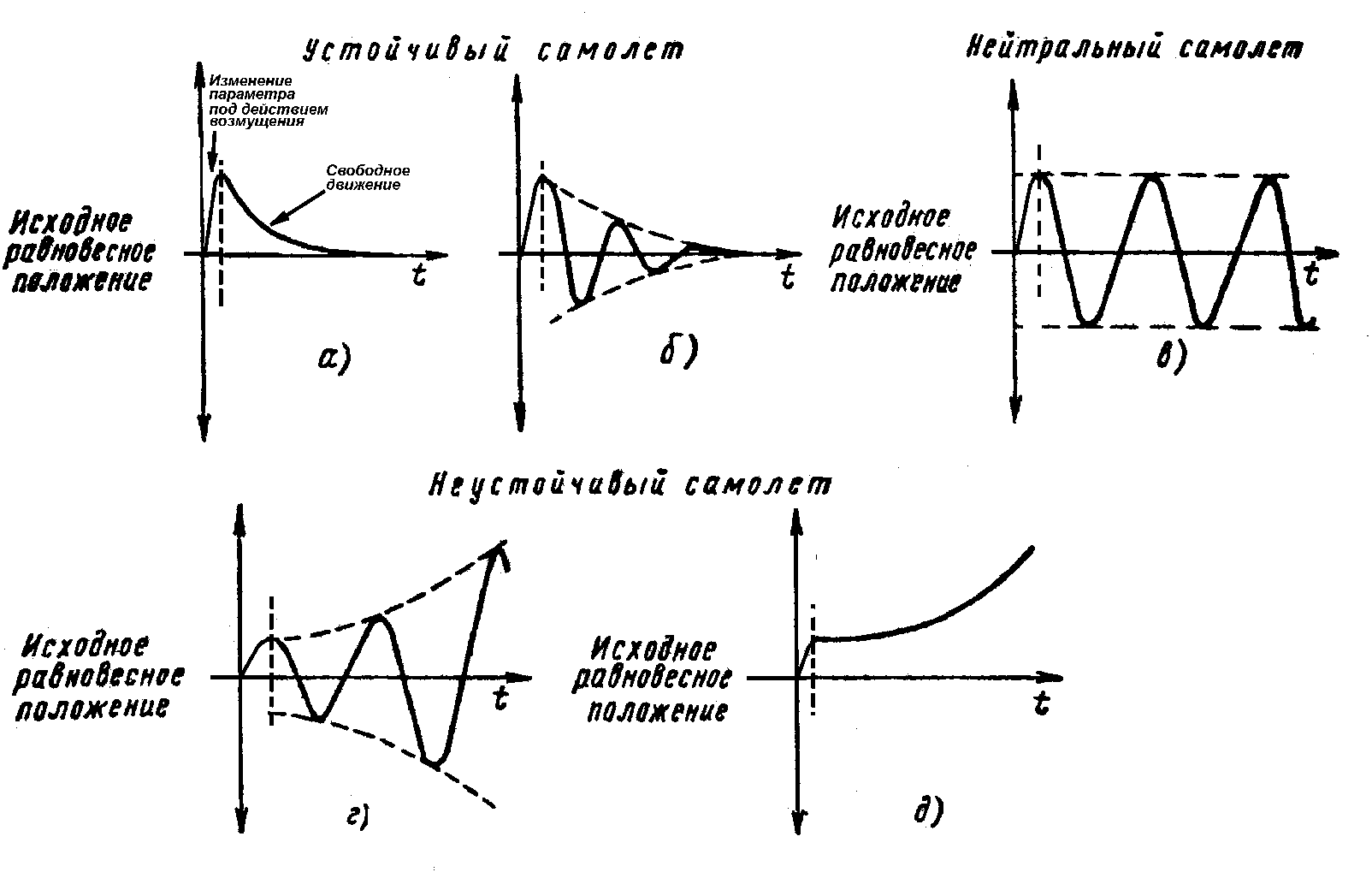 а – апериодическое затухающее движение, б – колебательное затухающее движение. В вариантах а) и б) имеется статическая устойчивость и характеристики динамической устойчивости приемлемы. в – незатухающее колебательное движение с постоянной амплитудой, г – незатухающее колебательное движение с нарастающей амплитудой. В вариантах в) и г) имеется статическая устойчивость, но характеристики динамической устойчивости неприемлемы. д – апериодическое нарастающее отклонение от исходного положения — отсутствует статическая устойчивость, о динамике движения вообще нет смысла говорить. Искусственное повышение устойчивости. |