Летные испытания. Конспект лекций Лекция 1
 Скачать 3.06 Mb. Скачать 3.06 Mb.
|

|
Раздел а/д, изучающий вопросы устойчивости рассматривает самолет как объект с неизменной конфигурацией (в т.ч. с неизменным положением поверхностей управления). В классическом понимании устойчивым считается самолет, возвращающийся в исходное состояние сам, без отклонения поверхностей управления. Это объясняет парадокс «возможность полета на неустойчивом самолете» — при воздействии внешнего возмущения надо при помощи внешнего воздействия отклонять поверхности управления так, чтобы они возвращали самолет в исходное положение (примеры — движение РВ и РН). Это и есть принцип искусственного повышения устойчивости. Первым таким «повышателем устойчивости» стал летчик. Весь в поту, непрерывно двигая ручкой, квалифицированный летчик мог поддерживать установившийся режим полета аэродинамически неустойчивого самолета И-16 (мне точно неизвестны количественные хар-ки устойчивости И-16). На это уходило очень большая часть внимания, времени, усилий, и тем большая, чем хуже был подготовлен летчик. Однако в полете у летчика есть множество других занятий, более важных (рассказать почему). Поэтому, от такого быстро отказались и стали делать аэродинамически устойчивые самолеты. С системной точки зрения выход из парадокса выглядит так: нужно изменить систему — добавить в нее контур поддержания устойчивости — летчика. Самолет без летчика — неустойчив, самолет с летчиком — устойчив. С развитием автоматики появилась возможность передать функции искусственного поддержание устойчивости автоматическим системам и выполнять полет на неустойчивых самолетах или самолетах с пониженной устойчивостью без увеличения нагрузки на пилота. К этому времени появилась необходимость этого. Те же самые конструктивные меры, создающие устойчивость (хвостовое оперение достаточно большой площади) приводят к возникновению т.н. балансировочного сопротивления, и увеличивает профильное сопротивление. Особенно сильно это сказывается на с/з скоростях. Поэтому сейчас существуют самолеты, а/д неустойчивые на д/з скоростях и применяющие СУУ и а/д устойчивые на с/з скоростях. Для исправления локальных нарушений устойчивости применяют АПУС — более простую систему. С системной точки зрения это выглядит также: самолет без СУУ — неустойчив, самолет с СУУ — устойчив. 2.5.2. Понятие об управляемости. Важным свойством самолета является управляемость — способность самолета изменять свое пространственное угловое положение в зависимости от перемещения органов управления. Устойчивость и управляемость тесно связаны между собой. На устойчивом в продольном канале самолете каждому положению органов управления (РВ/стабилизатора и РУС) при заданной конфигурации соответствует единственное значение угла атаки, что при известных массе и тяге двигателя однозначно определяет режим полета. Чтобы перевести самолет на другой режим полета надо установить органы управления в другое положение. Тогда исходное положение станет неравновесным и самолет под действием сил, поддерживающих устойчивость, перейдет в новое положение и установится в нем без дальнейших воздействий пилота. На неустойчивом самолете так не получится. Но, при очень больших запасах устойчивости ухудшаются характеристики переходных процессов, самолет медленнее реагирует на перемещение органов управления, поэтому есть оптимальные значения устойчивости. 2.5.3. Характеристики продольной устойчивости и управляемости самолета. Характеристики продольной cтатической устойчивости. Для фиксированного управления: Продольная статическая устойчивость характеризуется следующими параметрами.  запас продольной статической устойчивости по перегрузке. запас продольной статической устойчивости по перегрузке. запас продольной статической устойчивости по скорости. запас продольной статической устойчивости по скорости. и и  у устойчивого самолета < 0 у устойчивого самолета < 0Можно показать, что:   где  — коэффициент эффективности продольного управления (<0), величина постоянная, но трудноопределимая с достаточной точностью. — коэффициент эффективности продольного управления (<0), величина постоянная, но трудноопределимая с достаточной точностью.Т.о. запас продольной статической устойчивости однозначно определяется наклоном балансировочных кривых: по перегрузке: Хв(ny), по скорости Хв(V). Эти параметры можно определить непосредственно в испытаниях, их и принимают и нормируют в качестве критериев. Для оценки характеристик устойчивости также используются зависимости: по перегрузке: Хв(α), δв(ny), δв(α), φст(ny), φст(α), по скорости Хв(V), Хв(М), δв(V), δв(M), φст(V), φст(M). При освобожденном управлении (без промежуточных выкладок) критерием является наклон балансировочных кривых по перегрузке: Рв(α), Рв(ny), по скорости Рв(V), Рв(М). 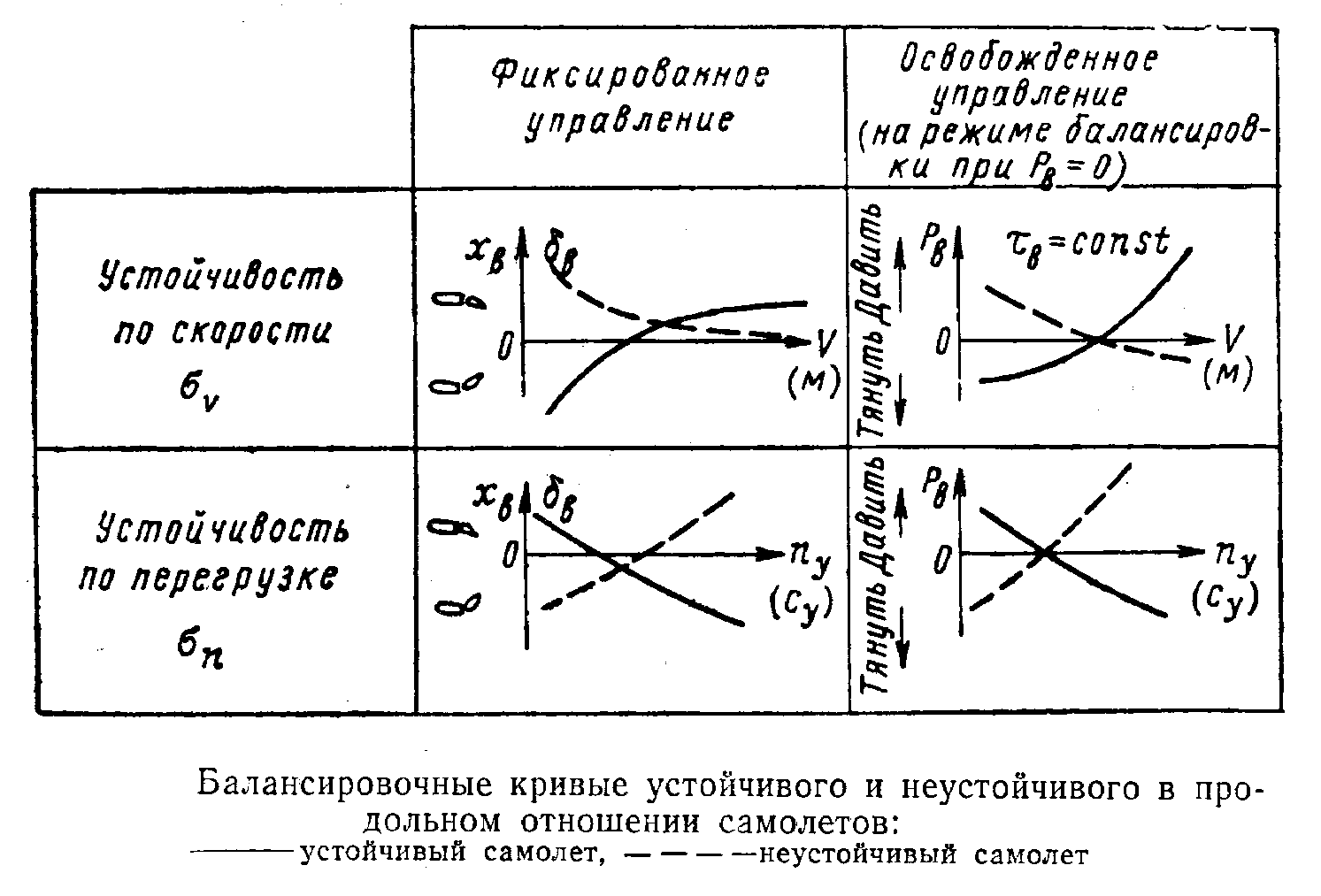 Характеристики продольной cтатической управляемости. К характеристикам продольной управляемости относятся: 1) Хвn , Рвn — градиенты ходов ручки и усилий по перегрузке, ХвV , РвV — градиенты ходов ручки и усилий по скорости. Т.е. те же параметры, которые характеризуют статическую устойчивость. 2) Рnmax — усилия, потребные для вывода самолета на максимально допустимую перегрузку, РVmax , РVmin — балансировочные усилия на максимальной и минимальной скоростях полета. 3) Дополнительные усилия, которые необходимо летчику прикладывать к рычагам управление для поддержания исходной скорости полета и перегрузки пу = 1 при следующих операциях: максимальном изменении тяги двигателя Рдв; выпуске и уборке тормозных щитков Ртщ; выпуске и уборке взлетно-посадочной механизации крыла Рмех; выпуске и уборке шасси Рш; максимальном изменении угла стреловидности крыла Рг; сбросе груза Ргр; полном или частичном сбросе внешних подвесок Рподв. Требования к характеристикам статической продольной устойчивости и управляемости самолета в нормативных документах. 1) В АП-23 требуется: Хвn , Рвn <0 в диапазоне ny a= 0.5 ÷  . .РвV>0 в указанных диапазонах скоростей (диапазоны различны для разных категорий самолетов и режимов полета). 2) В АП-25 требуется: РвV>0,05кг/(км/ч) в указанных диапазонах скоростей (диапазоны различны для разных режимов полета). 3) В НЛГС-3 (сейчас неприменимо): Хвn -50 мм, Рвn -10 кгс в диапазоне ny a= 0.5 ÷ ,РвV>0 в указанных диапазонах скоростей (диапазоны различны для разных категорий самолетов и режимов полета), Величины усилий не должны превышать 10 кг продолжительно и 35 кг кратковременно (на 30 сек). 4) В ОТТ ВВС требования более подробны и различны к разным классам самолетов: I класс — маневренные самолеты (nyэmax ≥5); II класс — ограниченно маневренные самолеты (3,5≤ nyэmax <5); III класс — неманевренные самолеты (nyэmax <3.5), делящиеся на три группы по взлетной массе (группа IIIа — Мвзл <50т, группа IIIб — 50т< Мвзл <100т, группа IIIв — Мвзл >100т). Нормируются: градиенты Хвn , Рвn , РвV , РвМ ; значения Рnmax , РVmax , РVmin , изменение усилий при различных маневрах. Цифры не приводятся по режимным соображениям. Характеристики продольной динамической устойчивости. Это время возвращения самолета в исходное состояние и вид процесса возвращения в исходное состояние. На рисунке для колебательного процесса. 1– рассматриваемый параметр (угол атаки, нормальная перегрузка, угловая скорость вращения). 2– управляющее воздействие (δРВ φст, Хв, Рв) 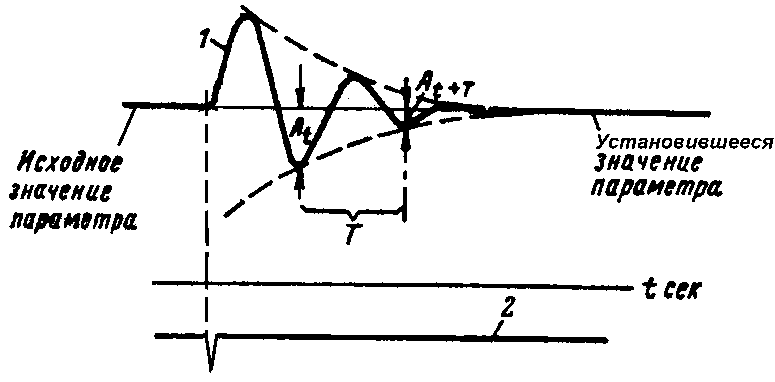 Характеристики: - Т — период колебаний. -  — показатель интенсивности уменьшения амплитуды колебаний за период; — показатель интенсивности уменьшения амплитуды колебаний за период; -  — декремент затухания колебаний самолета; — декремент затухания колебаний самолета;- tзат — время затухания (может быть в единицах времени или в периодах). ПРИМЕЧАНИЕ: А — амплитуда не является характеристикой процесса, т.к. зависит не от свойств системы, а от величины возмущения. Для апериодического процесса применимо только время затухания. Характеристики продольной динамической управляемости. На рисунке для колебательного процесса. 1– рассматриваемый параметр (угол атаки, нормальная перегрузка, угловая скорость вращения). 2– управляющее воздействие (δРВ φст, Хв, Рв) 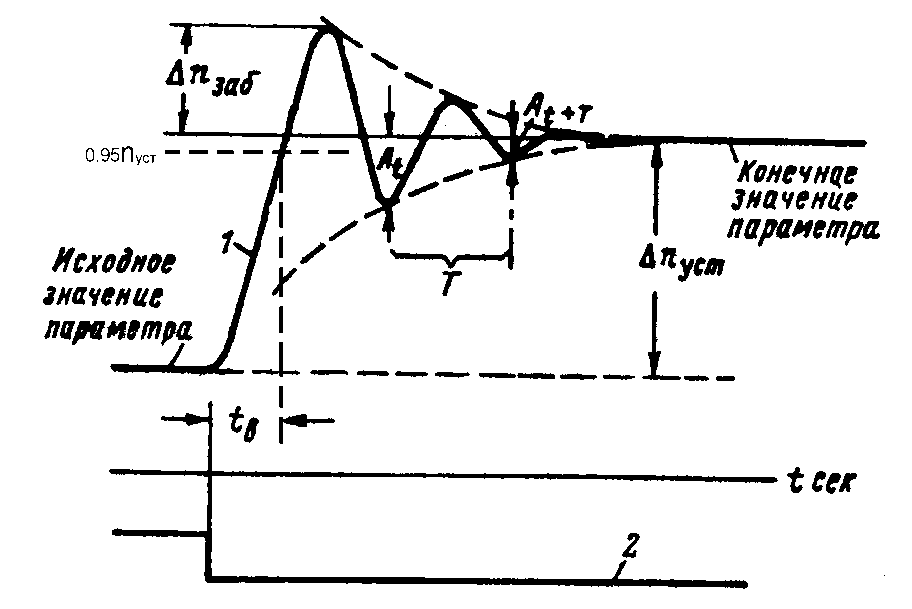 - tв — время срабатывания (достижения величины 0.95 от установившегося значения параметра). -. Требования к характеристикам динамической продольной устойчивости и управляемости самолета в нормативных документах. 1) В АП-23 требуется: Колебания по перегрузке должны быстро затухать. Длиннопериодические колебания траектории полета (колебания скорости или фугоидные колебания) не должны быть такими неустойчивыми, чтобы увеличивать рабочую нагрузку пилота или подвергать опасности самолет. Относительный заброс перегрузки и время срабатывания должны быть приемлемыми по оценке пилота. 2) В АП-25, НЛГС-3 требуется, чтобы все колебания в продольном канале быстро затухали. 3) В ОТТ ВВС нормируется: время срабатывания, величина относительного заброса, показатель интенсивности уменьшения амплитуды колебаний за период (все для ny). Определение характеристик продольной устойчивости и управляемости самолета в ЛИ. Характеристики продольной устойчивости и управляемости определяются при следующих условиях: А) для каждого варианта внешних подвесок; Б) при 2 – 3 значениях центровки, охватывающих весь диапазон эксплуатационных центровок и, если это реализуемо, превышающих его на ≈1%; В) для каждого из вариантов А), Б) в полетной конфигурации: - если потолок менее 10 км — на одной высоте (3÷6 км), если потолок более 10 км — на двух высотах (3÷6 км, и на 2÷3 км меньше статического потолка, диапазон между высотами 4÷6 км); - на каждой из высот при 2 – 5 значениях скорости в зависимости от диапазона скоростей полета (с обязательным охватом д/з, т/з, и с/з диапазона скоростей), а разгоны и торможения во всем эксплуатационном диапазоне скоростей; Г) для каждого из вариантов А), Б) во взлетной и посадочной конфигурациях на одной высоте (минимально необходимой по безопасности выполнения режимов) и при 1 – 2 значениях скорости. При этом полетная масса, РРД, стреловидность крыла, положение тормозных щитков и др. должны соответствовать эксплуатационным значениям для вышеприведенных режимов. Для количественной оценки динамической устойчивости и управляемости самолета выполняются следующие режимы: – Импульсы рулей, представляющие собой резкое кратковременное (в сравнении с периодом свободных колебаний самолета и временем переходного процесса) отклонение одного из рулей с быстрым возвращением его в исходное положение при неизменном положении двух других рулей. Длительность импульса доли секунды, величина отклонения руля разная: от минимальной до близкой к предельной. Подобным образом создаются начальные возмущения для исследования характера последующих свободных колебаний. Обработка: по записи импульса непосредственно определяются указанные выше показатели динамической устойчивости. – Дачи рулей, представляющие собой резкое ступенчатое отклонение одного руля на некоторый постоянный угол с сохранением его в течение 3—10 с при неизменном положении остальных рулей. Подобным образом исследуется характер реакции самолета на резкие отклонения рулей при оценке его динамической управляемости и устойчивости движения с постоянной скоростью. Обработка: по записи дачи можно определить указанные выше показатели как динамической устойчивости так и динамической управляемости. При определении основных характеристик статической устойчивости и управляемости самолета существуют два принципиально различных подхода: 1. Выполнение установившихся режимов полета с непосредственной регистрацией величины усилий, прикладываемых к рычагам управления, положений рычагов управления и балансировочных углов отклонения рулей при различных (постоянных в момент записи) значениях параметра, определяющего вид продольного самолета. 2. Выполнение неустановившихся режимов полета, в процессе которых летчик плавно меняет один из параметров, оказывающих влияние на исследуемые характеристики самолета. Регистрируются те же параметры, но при обработке полетного материала необходимо введение соответствующих поправок на нестационарность режима. Для определения характеристик устойчивости по скорости выполняют: «зубцы», т. е. фиксируемые в полете участки прямолинейного установившегося движения самолета вблизи заданной высоты с различной скоростью в диапазоне от 1,1 Vmin до Vmax поочередно при максимальной и минимальной тяге двигателей (это подход 1); координированные разгоны и торможения самолета с выдерживанием прямолинейной траектории на заданной высоте соответственно при максимальной и минимальной тяге двигателей (это подход 2). Для определения характеристик устойчивости по перегрузке выполняют: дачи по тангажу «от себя – на себя» руля высоты (стабилизатора) на различные углы (методику см. выше) — это подход 1; — плавное изменение угла атаки в допустимых для самолета эксплуатационных пределах угла атаки или перегрузки при постоянном (заданном) числе М полета и неизменном режиме работы силовой установки в процессе выполнения координированного виража-спирали или движения самолета без крена и скольжения в вертикальной плоскости. Время выполнения режима 15÷20сек. На вираже-спирали поддержание заданной скорости (числа М) достигается плавным увеличением угла крена, при выполнении маневра в вертикальной плоскости — дозированным отклонением рычага управления «на пикирование», а затем «на кабрирование»; торможения самолета от М≈1,3÷1,6 до М≈0,75÷0,8 с зафиксированным в сверхзвуковом полете положением ручки управления, соответствующим исходным значением перегрузки (обычно nу исх = 1); Первая группа контрольных маневров более проста в обработке, но трудоемка в полетах. Она применяется при испытаниях дозвуковых самолетов с относительно низкой тяговооруженностью и большой продолжительностью полета. Вторая группа контрольных маневров широко применяется при испытаниях современных самолетов. Использование их существенно сокращает потребное для эксперимента время и позволяет получить балансировочные кривые при условиях, практически одинаковых для всего семейства экспериментальных точек. Но она требует введения поправок на нестационарность режима, что затрудняет обработку и может привести к неполной адекватности результатов испытаний. Обработка материалов испытаний: - На режиме находят моменты времени, в которых dωz/dt = 0 и dα/dt = 0 — эти точки соответствую установившемуся режиму. - В них снимают значения δРВ (φст), Хв, Рв и α, ny, Су – (расчетный параметр), если исследуют уст. по перегрузке или V, М — если по скорости. - По этим точкам строят зависимости — это балансировочные кривые — первого приближения. Если таких точек много и они распределены по всем участкам исследуемого диапазона, то этого достаточно. - Если таких точек недостаточно, добавляют точки, в которых dωz/dt = 0, а dα/dt ≠ 0. Можно определить влияние нестационарности (значения dα/dt) на δРВ (φст), Хв, Рв и сделать приведение. - По углу наклона полученных балансировочных кривых определяют производные Хвn, Рвn ХвV , РвV — это количественные характеристики уст. и упр. Определение нейтральной центровки. Исходя из рассмотренной выше взаимосвязи величин n и Хвn можно сделать вывод, что: - при заданной конфигурации и в заданном диапазоне скоростей они зависят только от центровки; - запас продольной статической устойчивости n становится =0 при той же центровке, что и Хвn – это нейтральная центровка. НЦ расположена несколько позади фокуса за счет демпфирования – это видно из формулы , но дает достаточно точное представление о реальном положении фокуса, а для практических целей даже нужнее. Для определения НЦ строят балансировочные кривые при разных центровках (и одной конфигурации и скорости) и определяют значения Хвn. Затем строят зависимость Хвn(Хт), интерполируют ее (обычно линейно) и продлевают линию до оси Хт. Точка пересечения и есть НЦ. |