Конспект лекций по РЛС и САРП для СВФ. Конспект лекций по рлс и сарп для свф
 Скачать 0.66 Mb. Скачать 0.66 Mb.
|

Средства автоматической радиолокационной прокладки (САРП).Назначение и основные типы САРП. САРП совместно с РЛС предназначены для повышения безопасности плавания судов в районах интенсивного судоходства, вблизи берегов, в зонах разделения движения, в узкостях и по фарватерам в любых гидрометеорологических условиях. САРП – датчик информации, необходимый судоводителю для правильной оценки ситуации встречи с другими судами и принятия обоснованного решения для успешного расхождения с ними. Последовательность действий судоводителя при использовании радиолокационных средств:
САРП выполняет обработку радиолокационной информации и позволяет производить:
Структурно-функциональная схема.  Видеосигнал Лаг Гирокомпас Видеосигнал Лаг Гирокомпасот приемника Радар-процессор Основной Монитор (контроллер процессор видеосигнала) Угол поворота антенны Клавиатура или “трек-бол” Контроллер (управление К приемопередатчику управления системой и передатчиком приемопередатчиком) и приемником Захват целей на автосопровождение. Варианты захвата ручной и автоматический, При автоматическом захвате в процессор поступают данные в зоне поиска, устанавливаемой оператором на экране индикатора САРП, в результате чего цели в зоне поиска отбираются для автосопровождения без участия судоводителя. В режиме ручного захвата производится ручной отбор целей для автосопровождения как в зоне поиска, так и вне ее. Критерии захвата - количество непрерывных последовательных обнаружений РЛ цели при последовательных обзорах цели. (3/3, 8/8, 15/15) Особенности использования захвата целей - автоматический захват снимает часть нагрузки с судоводителя, но может привести к избытку векторной информации на экране индикатора при большом количестве автосопровождаемых целей. (затрудняет определение приоритетных параметров). - в режиме ручного захвата, несмотря на потерю времени, необходимого для захвата целей и сброса целей с сопровождения, будут отобраны именно те цели, которые действительно представляют интерес для судоводителя. Первичная обработка радиолокационных сигналов: квантование, фильтрация, обнаружение полезных сигналов, обнаружение и опознавание (классификация) объектов, измерение координат объектов.   Квантование сигнала  Вторичная обработка радиолокационной информации: сглаживание координат, выработка параметров движения и кратчайшего сближения, оценка ситуации встречи, планирование и проигрывание маневра. Задержки выработки информации. Влияние датчиков информации (РЛС, гирокомпас, лаг, GPS, пользователь) на точность выработки информации в САРП. Формуляр  Процедура автосопровождения радиолокационных целей, назначение. Переброс автосопровождения Потеря автосопровождения. Критерии сброса с автосопровождения. Полуавтоматическое сопровождение, особенности реализации и использования. Методы представления информации в САРП: графический («графика АС»), буквенно-цифровой («формуляр»), звуко-световой («сигнализация»). Буквенно-цифровая информация высвечивается на буквенно-цифровом табло на периферии индикатора, символьно-графическая – на рабочем поле индикатора САРП в пределах его эффективного диаметра. Символьно-графическая информация отображается на экране ЭЛТ автоматически или по вызову оператора. Информация, отображаемая автоматически, может иметь вид 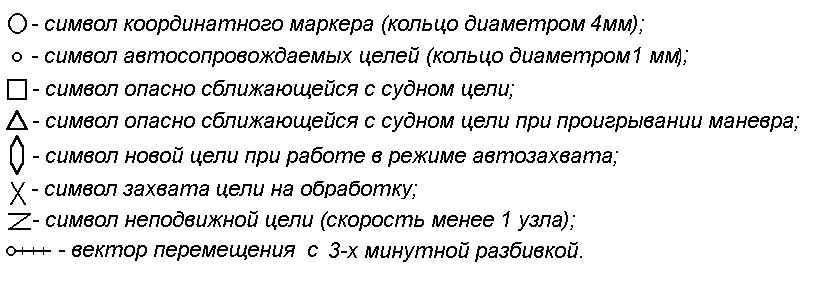 Возможные виды информации, отображаемой по вызову оператора:  Символы, присваиваемые оператором автосопровождаемым объектам, могут иметь такой вид: 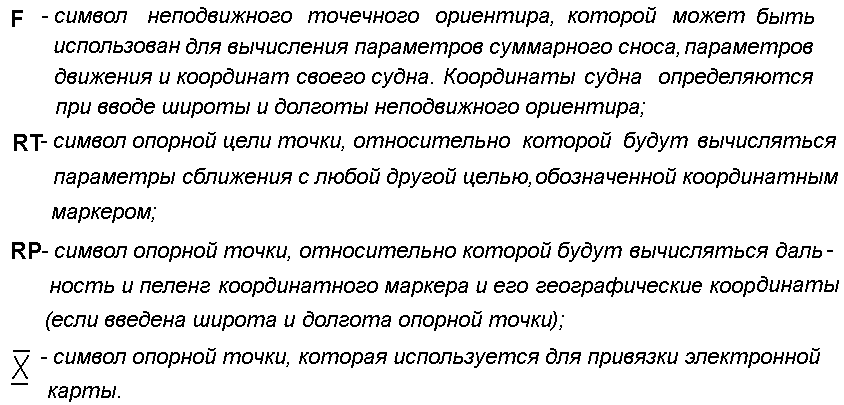 В САРП предусмотрена световая и звуковая сигнализации:
Требования IMO к САРП, основные и вспомогательные режимы работы.
Новые требования к РЛС, СЭП, САС, САРП, АИС, ЭКС (резолюции MSC.191.(79), 192(79), SN/Circ.243)
Точность измерения дистанции 30 метров (1% от шкалы); Точность измерения пеленга 1 градус; Обнаружение целей 8/10 оборотов; Обнаружение целей при скорости до 30 узлов 100 узлов (относительная); Более 30 узлов 140 узлов (относительная); Максимальная дальность обнаружения
Минимальная дальность обнаружения 40 м; Разрешающая способность по дальности 50 м; Разрешающая способность по углу 2,5 градуса; д.б. ручная и автоматическая настройка Д.б. средства определения падения характеристик Постоянная общая опорная точка для рл-измерений. Шкалы дальности - 0,25/0,5/0,75/1,5/3/6/12/24 морских мили. НКД - 2 шт. с точностью 30 м или 1% от шкалы дальности. Курсовая линия с точностью до 0,1 градуса с возможностью юстировки. ЭВН - 2 шт. с точность 1 градус. Параллельные индексные линии - минимум 4 с установкой по пеленгу и ширине. САС на шкалах 3, 6, 12 миль. Автоматический (границы зоны захвата) и ручной захват. Сопровождение через 1 минуту, перемещение в течении 3 минут. Сопровождение при различимости 5 из 10 последовательных оборотов. Точность сопровождения
Сигнализация:
Цели АИС - пассивные и активизированные (графические). Активизация целей - автоматическая (в зоне), ручная, в зависимости от классификации. Классификация АИС целей - по дальности, по Д кр или Т кр., классу (А или В) и др. Для целей АИС общая опорная с РЛС точка. В АИС - прошлая траектория движения. Формуляр РЛС цели
Формуляр АИС цели
Аварийно- предупредительная сигнализация АИС:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||