Электропривод. Контрольная работа 1 Дисциплина Электропривод и преобразователи подвижного состава
 Скачать 371.16 Kb. Скачать 371.16 Kb.
|

|
Департамент образования и науки Тюменской области ГАПОУ ТО «ТКТТС» Контрольная работа №1 Дисциплина: Электропривод и преобразователи подвижного состава
Тюмень, 2020 1.Классификация электроприводов. 2. Механические характеристики рабочих машин и электродвигателей. Определения, уравнения, графические изображения, понятия жесткости. 3. Искусственные механические характеристики 3-х фазного асинхронного электродвигателя при измерении частоты тока и активного сопротивления в обмотке ротора. 4. Способы уменьшения пусковых токов 3-х фазных асинхронных двигателей с короткозамкнутым ротором. 5. Потери электроэнергии при пуске асинхронного электродвигателя без нагрузки. 1. КЛАССИФИКАЦИЯ ЭЛЕКТРОПРИВОДОВ Существуют различные виды приводов, но благодаря эффективному аккумулированию, простоте передачи, свойствам суммирования и делимости электроэнергия более широко используется по сравнению с другими видами энергии. В настоящее время наиболее часто используется автоматизированный электропривод (ГОСТ Р 50369-92). Электрическим приводом (ЭП) называется электромеханическая система, предназначенная для приведения в движение рабочих органов машин, целенаправленного управления этими процессами и состоящая из передаточного, электродвигательного, преобразовательного, управляющего и информационного устройств. Передаточное устройство предназначено для преобразования форм движения и передачи механической энергии от двигательного устройства к рабочим органам машины. Двигательное устройство преобразует электрическую энергию в механическую и формирует совместно с передаточным устройством заданные формы движения рабочих органов. Преобразовательное устройство служит для связи СЭП с источником электроэнергии (промышленная сеть или автономный), для преобразования одной формы электроэнергии в другую (например, выпрямление переменного тока). Управляющее и информационное устройства предназначены для формирования заданных законов управления потоком энергии W и движения рабочих органов машин. Классификация ЭП 1. По назначению: а) главные (например, главного движения); б) вспомогательные (например, подачи). 2. По роду потребляемого тока двигателя: а) постоянного тока; б) переменного тока. 3. По виду силовых ключей: а) тиристорные; б) транзисторные; в) микропроцессорные 4. По виду системы автоматического управления (САУ): а) аналоговые (непрерывные) системы ЭП (СЭП); б) цифровые (дискретные) СЭП; в) цифроаналоговые СЭП; г) линейные или нелинейные СЭП; д) статические или астатические СЭП; 5. По выполняемым функциям: а) грубое регулирование скорости (разомкнутые СЭП); б) точное регулирование скорости (замкнутые СЭП); в) слежение за произвольно изменяющимися входными сигналами (следящие системы); г) программная отработка заданий (СЭП с программным управлением); д) взаимосвязанное регулирование параметров (многодвигательные и взаимосвязанные СЭП); Функции а)-д) считаются основными. К дополнительным функциям относятся: сигнализация (диагностика) и защита ЭП. ----- Электроприводы (далее ЭП) классифицируются по характеру движения, типам электродвигателя и силового преобразователя, количеству используемых электродвигателей, структурам и технической реализации систем управления, наличию или отсутствию механической передачи и т.д. 1. По соотношению числа двигателей и исполнительных органов рабочих машин различают: • групповые ЭП, обеспечивающие движение исполнительных органов нескольких рабочих машин или движение нескольких исполнительных органов одной рабочей машины; • индивидуальные ЭП, обеспечивающие движение одного исполнительного органа одной рабочей машины; • взаимосвязанные ЭП, состоящие из двух или более двигателей или механически связанных между собой ЭП, при работе которых поддерживается заданное соотношение их скоростей и (или) нагрузок, и (или) положения исполнительных органов рабочих машин. При наличии механической связи между ЭП взаимосвязанный ЭП называется многодвигательным, при наличии электрической связи — электрическим валом. 2. По характеристике движения исполнительных органов рабочих машин различают: • ЭП вращательного движения, обеспечивающие вращательное движение исполнительных органов рабочих машин; • ЭП поступательного движения, обеспечивающие поступательное движение исполнительных органов рабочих машин; • ЭП возвратно-поступательного движения, обеспечивающие возвратно-поступательное (вибрационное) движение исполнительных органов рабочих машин; • ЭП непрерывного движения, обеспечивающие непрерывное движение исполнительных органов рабочих машин; • ЭП дискретного движения, обеспечивающие дискретное перемещение исполнительных органов рабочих машин; • реверсивные ЭП, обеспечивающие движение исполнительных органов рабочих машин в любом из двух противоположных направлений; • нереверсивные ЭП, обеспечивающие движение исполнительных органов рабочих машин только в одном направлении; • многокоординатные ЭП, обеспечивающие движение исполнительных органов рабочих машин по двум или более пространственным координатам; • моментный ЭП, обеспечивающий заданный момент или усилие на исполнительных органах рабочих машин; • позиционный ЭП, обеспечивающий перемещение и установку исполнительных органов рабочих машин в заданное положение; • многоскоростные ЭП, обеспечивающие движение исполнительных органов рабочих машин с любой из двух или более фиксированных скоростей; • регулируемые ЭП, обеспечивающие управляемое изменение координат движения исполнительных органов рабочих машин; • нерегулируемые ЭП, не обеспечивающие управляемое изменение координат движения исполнительных органов рабочих машин; • ЭП согласованного движения, обеспечивающие согласованное движение двух или более исполнительных органов рабочих машин. 3. По характеристике и структуре системы управления различают: • неавтоматизированные ЭП, операции по управлению которыми выполняет оператор; • автоматизированные ЭП, все или часть операций управления в которых выполняют устройства управления; • следящие ЭП, обеспечивающие перемещение исполнительных органов рабочих машин в соответствии с произвольно изменяющимся входным задающим сигналом; • ЭП с программным управлением, обеспечивающие перемещение исполнительных органов рабочих машин в соответствии с заданной программой; • адаптивные ЭП, автоматически избирающие структуру и (или) параметры своей системы управления при изменении возмущающих воздействий; • ЭП с регулированием энергетических показателей, обеспечивающие заданный закон изменения одного или нескольких энергетических показателей работы; • ЭП с разомкнутой (замкнутой) системой управления, в которых отсутствуют (имеются) обратные связи по регулируемым координатам и (или) по возмущающему воздействию. 4. По технической (аппаратной) реализации элементов ЭП различают: • ЭП постоянного (переменного) тока, содержащие двигатели постоянного (переменного) тока; • тиристорные (транзисторные) ЭП, содержащие тиристорные (транзисторные) преобразователи электроэнергии; • система «генератор — двигатель» (система «статический преобразователь — двигатель») — ЭП, в состав которых входят элек- тромашинные (статические) преобразователи электроэнергии; • ЭП с релейно-контакторным (бесконтактным) управлением, система управления которыми реализована на основе релейноконтакторной (бесконтактной) аппаратуры; • ЭП с мехатронным модулем, объединяющим двигатель с электронными и электромеханическими компонентами управления, диагностики и защиты; • редукторный (безредукторный) ЭП, механическая передача которых содержит (не содержит) редуктор; • маховичный ЭП, механическая передача которых содержит маховик; • дифференциальный ЭП, представляющий собой многодвигательный ЭП, в котором скорость и момент двигателей алгебраически суммируются с помощью механического дифференциала; • ЭП с тормозным устройством (управляемой муфтой), механическая передача которых содержит тормозное устройство (управляемую муфту). 2. Механические характеристики рабочих машин и электродвигателей. Определения, уравнения, графические изображения, понятия жесткости. 1. Механические характеристики рабочих машин (зависимость угловой скорости механизма от момента сопротивления на его валу) : 1 – не зависящая от скорости; 2 – линейно зависящая; 3 – нелинейно зависящая (вентиляторная); 4 – намоточно-размоточная. 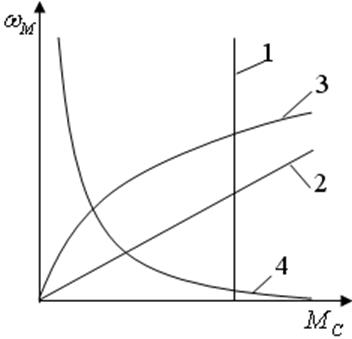 2. Механические характеристики ЭД (зависимость угловой скорости двигателя от момента сопротивления на его валу)  : :1 – синхронный двигатель (СД); 2 – двигатель постоянного тока с независимым возбуждением (ДПТ с НВ) и вентильный двигатель (ВД); 3 – трехфазный асинхронный двигатель (АД); 4 – двигатель постоянного тока с последовательным возбуждением (ДПТ с ПВ); 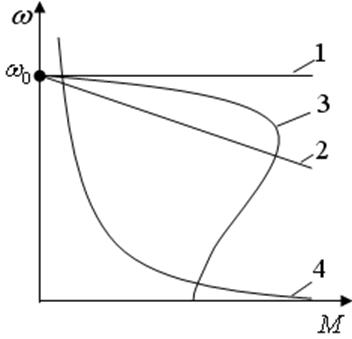 При выборе привода согласование механических характеристик двигателя и рабочей машины происходит по следующим параметрам: а) по диапазону регулирования скорости б) по нагрузке ( в) по энергетическим показателям ( 4. Механические характеристики асинхронных двигателей (АД) 1) Механические характеристики 3-фазных АД  Асинхронный электродвигатель имеет трехфазную обмотку статора. При подаче на неё трехфазного напряжения частотой  , где , где пар полюсов статора (определяется укладкой обмотки). Ротор АД чаще всего выполняется короткозамкнутым ("беличья клетка"). В подъёмных и транспортных машинах применяют фазный ротор, где обмотка ротора через контакные кольца выводится на неподвижное основание и соединяется с добавочными сопротивлениями. В настоящее время АД по умолчанию применяют для привода большинства объектов. При описании АД электрические параметры двигателя имеют индексы: 1 – статор; 2 – ротор. При R1=0 механическая характеристика описывается формулой  , где , где  - скольжение. - скольжение.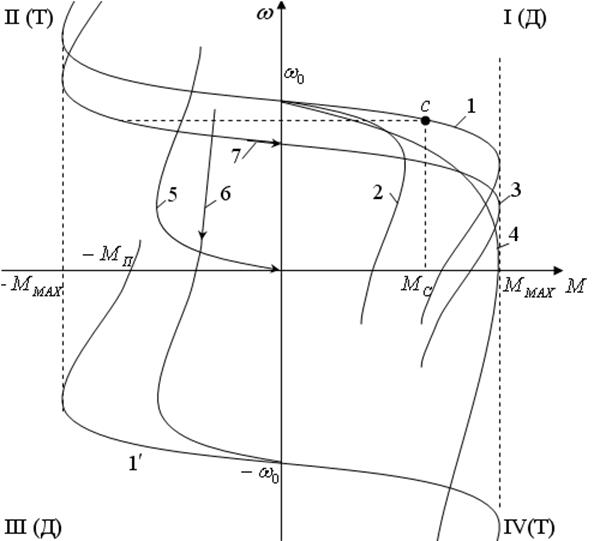 1 – естественная ( 1' – реверс (меняются местами две из трех фаз); 2 - 3 - 4 – АД с фазным ротором тормозные режимы 5 – динамическое торможение: на обмотку статора подается постоянный ток, тогда раскручиваемый ротор будет тормозиться; 6 – противоток (реверс): (меняются местами две фазы); 7 – рекуперация Пуск АД: Для ограничения пусковых токов АД большой мощности или получения плавного пуска асинхронного привода применяют: 1) включение активных или индуктивных сопротивлений в цепи статора, которые выводятся в конце пуска; 2) "частотный" пуск через преобразователь, плавно изменяющий частоту питания двигателя 3) пуск с фазным ротором; 4) реакторный пуск – включение индуктивных сопротивлений в цепь ротора. Вначале пуска частота тока в роторе близка к частоте сети, индуктивное сопротивление 4.5.4 Влияние частоты питающей сети 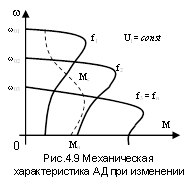 Изменение частоты питающей сети приводит не только к изменению критического скольжения и максимального момента, но и синхронной скорости , С изменением частоты f1 изменяется Xk, а поэтому на характеристике может оказывать существенное влияние и сопротивление R1, роль которого с изменением Xk может меняться. Например при значительном снижении частоты, когда влияние величины R1 из – за уменьшения Xk становится значительным, критический момент заметно уменьшается. Критическое скольжение и синхронная скорость изменяются в одинаковой степени, критическое скольжение уменьшается с ростом частоты, и с уменьшением ее растет. Характеристики в пределах рабочей части будут, параллельны друг другу с изменением частоты меняется и пусковой момент. Механические характеристики ЭД. Механической характеристикой ЭД называется зависимость его частоты вращения от вращающего или тормозного момента на валу или от потребляемого тока n=f(M) или п=f(J). 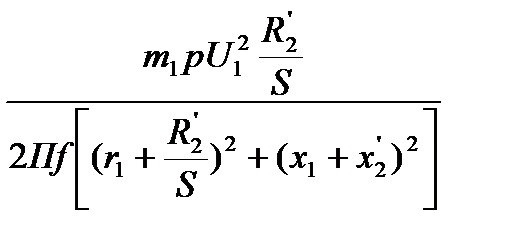 М= (б) Полученные уравнения представляют собой уравнения механической характеристики асинхронного двигателя. Из формулы видно, что величина вращающего м-та асинхронного электродвигателя зависит от параметров электродвигателя подводимого напряжения и величины скольжения. Вращающийся момент прямо пропорционален квадрату подводимого напряжения. Поэтому асинхронные двигатели весьма чувствительны к изменению напряжения. Это понятно, т.к. магнитный поток Ф и ток в роторе I2 зависит от напряжения U1. Исследуем зависимость вращающего момента от скольжения при условии, что U1 и f – сonst. В момент пуска электродвигателя S =1 и развиваемый электродвигатель пусковой м-т Мn = 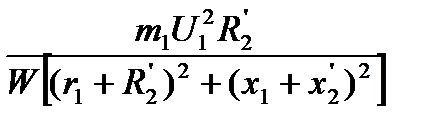 т.е. величина пускового м-та зависит от активного сопротивления цепи обмотки ротора. Поэтому для увеличения пускового м-та в цепь ротора вводят на время пуска пусковой реостат ( для двигателем с фазным ротором). Для определения значения максимального вращающего м-та Мmax, который может развивать электродвигатель при изменении скольжения от 1 до 0 найдем величину скольжения Sк, при котором этот момент наступает. Для этого берут производную  xk=x1+x’2 – индуктивное сопротивление К.З. величина Sk - называется критическим скольжением. Следовательно, изменяя величину активного сопротивления ротора, можно изменить величину скольжения, при котором электродвигатель развивает максимальный момент. Подставляя величину Мmax  Знак (+) относится к двигательному режиму, (-) - к тормозному. Величина Мmax пропорциональна квадрату прим. напряжения U12 и не зависит от активного сопротивления ротора. Зависимость М= f·(S) - механическая характеристика имеет вид: 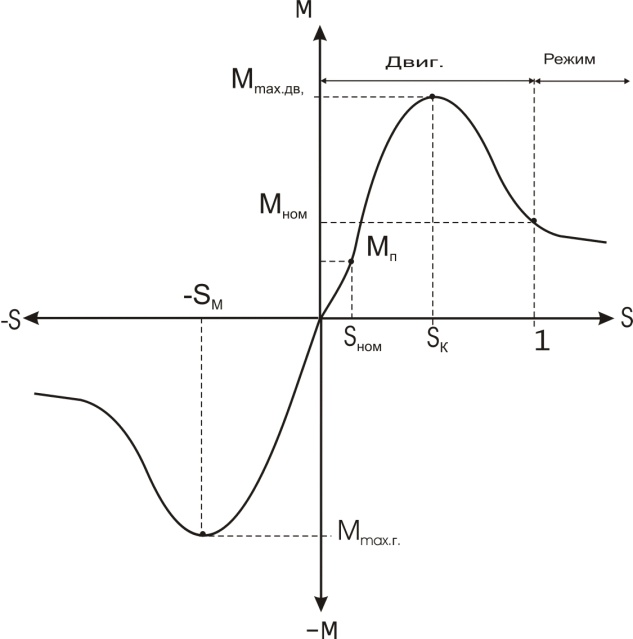 Механическая характеристика асинхронного электродвигателя Характерными участками этой кривой являются: 1. участок O Максимальный вращающийся момент различен (+) - соответствует двигательному режиму, (-) - генераторному. Рассмотрим подробнее двигательный режим. При пуске в ход асинхронного электродвигателя вращающийся момент его относительно невелик, но все же больше, чем момент сил сопротивления. (М > Мсопр). Это приводит к тому, что ротор электродвигателя начинает вращаться постоянно увеличивая скорость. Скольжение наоборот падает. По мере уменьшения скольжения вращающий момент электродвигателя пройдет через максимум и начнет спадать. При равенстве Мсопр. = Мвращ ротор двигателя будет вращаться с постоянным числом оборотов. Если механическая нагрузка электродвигателя увеличится и соответственно возрастет момент сил сопротивления ( Мсопр> М), то W ротора начнет уменьшаться, а скольжение и вращающий момент электродвигателя - увеличиваются. В итога вновь наступит динамичное равновесие ( М = Мсопр), но уже при меньшей W. Максимальное значение вращающего момента не зависит от активного сопротивления роторной цепи. Однако при изменении R2 (ротора) изменяется величина скольжения Sк. Следовательно, путем изменения R ротора можно добиться того, чтобы Мmax получался при любом скольжении. Кроме увеличения пускового момента введения реостата позволяет ограничивать пусковой ток Jn. |