Электропривод. Контрольная работа 1 Дисциплина Электропривод и преобразователи подвижного состава
 Скачать 371.16 Kb. Скачать 371.16 Kb.
|

|
2.11.1. Способы пуска АД с короткозамкнутым ротором Прямой пуск. Это наиболее простой способ пуска. Обмотка статора включается непосредственно в сеть на номинальное напряжение (рис.2.14).
Пусковой ток равен Прямой пуск возможен, когда сеть мощная и пусковой ток АД не вызывает недопустимо больших падений напряжения в сети (не более 10-15%). Три способа пуска при пониженном напряжении. Они применяются, если по условию допустимого падения напряжения в сети прямой пуск невозможен, и обладают одинаковым недостатком – уменьшением пускового момента ( Поэтому эти способы реализуются, когда возможен пуск АД на холостом ходу или под неполной нагрузкой, что чаще встречается у мощных высоковольтных двигателей. Реакторный пуск (рис.2.15). Сначала включается В1. Напряжение
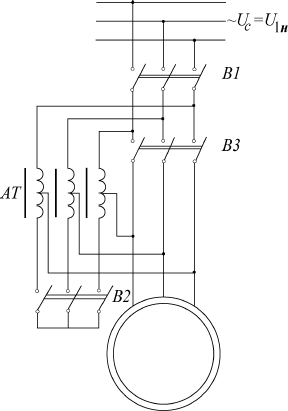
подается на обмотку статора через трехфазный реактор Р, поэтому обмотка статора запитана пониженным напряжением. Сопротивление реактора xp выбирается таким образом, чтобы напряжение на фазе обмотки статора было не менее 65% номинального. После достижения АД установившейся частоты вращения включается выключатель В2, который шунтирует реактор Р, в результате чего на клеммы обмотки статора подается полное напряжение сети, равное номинальному напряжению обмотки статора. Пусковой ток при реакторном пуске равен  раз. раз.Во столько же раз уменьшается напряжение на клеммах обмотки статора в начальный момент пуска. Начальный пусковой момент при реакторном пуске Мпр уменьшается по сравнению с начальным пусковым моментом при прямом пуске Мпр в  раз. раз.В приведенных соотношениях не учитывается изменение величины Автотрансформаторный пуск(рис.2.16). Сначала включаются В1 и
В2 и на обмотку статора АД через автотрансформатор АТ подается пониженное до (0,55 0,73)UH напряжение. После достижения АД установившейся частоты вращения выключатель отключается и на обмотку статора подается напряжение через часть обмотки АТ, который в этом случае работает как реактор. Затем включается В3, и на клеммы обмотки статора подается полное напряжение сети, равное номинальному напряжению обмотки статора. Если пусковой автотрансформатор понижает пусковое напряжение АД в kAT раз (kAT - коэффициент трансформации автотрансформатора), то пусковой ток АД и ток на низкой стороне автотрансформатора уменьшатся также в kAT раз. Пусковой момент MП, пропорциональный квадрату напряжения на клеммах обмотки статора АД, уменьшится в k2AT раз. Пусковой ток на высокой стороне автотрансформатора и ток в сети уменьшатся также в k2AT раз. Таким образом, при автотрансформаторном пуске пусковой момент АД и пусковой ток в сети уменьшаются в одинаковое число раз. При реакторном пуске пусковой ток АД является также пусковым током в сети, а пусковой момент MП уменьшается быстрее пускового тока. Поэтому при одинаковых значениях пускового тока в сети при автотрансформаторном пуске пусковой момент будет больше. Несмотря на это преимущество автотрансформаторного пуска перед реакторным, достигнутое ценой значительного усложнения и удорожания пусковой аппаратуры, этот пуск применяется реже реакторного в том случае, когда реакторный пуск не обеспечивает необходимого пускового момента. Пуск переключением “звезда-треугольник”(рис.2.17).
Этот способ пуска ранее широко применялся при пуске низковольтных АД, но в связи с увеличением мощности сетей потерял свое прежнее значение, используется сравнительно редко. Для его применения необходимо, чтобы были выведены все шесть клемм обмотки статора, линейное напряжение сети равно номинальному фазному напряжению обмотки статора. В первый момент пуска обмотка статора соединена в “звезду”, а при достижении устойчивой частоты вращения схема соединения обмотки изменяется переключателем П на “треугольник”. При таком способе пуска на фазы обмотки статора подается напряжение уменьшенное в раз по сравнению с номинальным, пусковой момент уменьшается в 3 раза, пусковой ток в фазах уменьшается в  раз, а пусковой ток в сети в 3 раза. Таким образом, рассматриваемый способ пуска равноценен автотрансформаторному пуску при раз, а пусковой ток в сети в 3 раза. Таким образом, рассматриваемый способ пуска равноценен автотрансформаторному пуску при Классификация электроприводов ЭП классифицируются по характеру движения, типам электродвигателя и силового преобразователя, количеству используемых электродвигателей, структурам и технической реализации систем управления, наличию или отсутствию механической передачи и т.д. 1. По соотношению числа двигателей и исполнительных органов рабочих машин различают: • групповые ЭП, обеспечивающие движение исполнительных органов нескольких рабочих машин или движение нескольких исполнительных органов одной рабочей машины; • индивидуальные ЭП, обеспечивающие движение одного исполнительного органа одной рабочей машины; • взаимосвязанные ЭП, состоящие из двух или более двигателей или механически связанных между собой ЭП, при работе которых поддерживается заданное соотношение их скоростей и (или) нагрузок, и (или) положения исполнительных органов рабочих машин. При наличии механической связи между ЭП взаимосвязанный ЭП называется многодвигательным, при наличии электрической связи — электрическим валом. 2. По характеристике движения исполнительных органов рабочих машин различают: • ЭП вращательного движения, обеспечивающие вращательное движение исполнительных органов рабочих машин; • ЭП поступательного движения, обеспечивающие поступательное движение исполнительных органов рабочих машин; • ЭП возвратно-поступательного движения, обеспечивающие возвратно-поступательное (вибрационное) движение исполнительных органов рабочих машин; • ЭП непрерывного движения, обеспечивающие непрерывное движение исполнительных органов рабочих машин; • ЭП дискретного движения, обеспечивающие дискретное перемещение исполнительных органов рабочих машин; • реверсивные ЭП, обеспечивающие движение исполнительных органов рабочих машин в любом из двух противоположных направлений; • нереверсивные ЭП, обеспечивающие движение исполнительных органов рабочих машин только в одном направлении; • многокоординатные ЭП, обеспечивающие движение исполнительных органов рабочих машин по двум или более пространственным координатам; • моментный ЭП, обеспечивающий заданный момент или усилие на исполнительных органах рабочих машин; • позиционный ЭП, обеспечивающий перемещение и установку исполнительных органов рабочих машин в заданное положение; • многоскоростные ЭП, обеспечивающие движение исполнительных органов рабочих машин с любой из двух или более фиксированных скоростей; • регулируемые ЭП, обеспечивающие управляемое изменение координат движения исполнительных органов рабочих машин; • нерегулируемые ЭП, не обеспечивающие управляемое изменение координат движения исполнительных органов рабочих машин; • ЭП согласованного движения, обеспечивающие согласованное движение двух или более исполнительных органов рабочих машин. 3. По характеристике и структуре системы управления различают: • неавтоматизированные ЭП, операции по управлению которыми выполняет оператор; • автоматизированные ЭП, все или часть операций управления в которых выполняют устройства управления; • следящие ЭП, обеспечивающие перемещение исполнительных органов рабочих машин в соответствии с произвольно изменяющимся входным задающим сигналом; • ЭП с программным управлением, обеспечивающие перемещение исполнительных органов рабочих машин в соответствии с заданной программой; • адаптивные ЭП, автоматически избирающие структуру и (или) параметры своей системы управления при изменении возмущающих воздействий; • ЭП с регулированием энергетических показателей, обеспечивающие заданный закон изменения одного или нескольких энергетических показателей работы; • ЭП с разомкнутой (замкнутой) системой управления, в которых отсутствуют (имеются) обратные связи по регулируемым координатам и (или) по возмущающему воздействию. 4. По технической (аппаратной) реализации элементов ЭП различают: • ЭП постоянного (переменного) тока, содержащие двигатели постоянного (переменного) тока; • тиристорные (транзисторные) ЭП, содержащие тиристорные (транзисторные) преобразователи электроэнергии; • система «генератор - двигатель» (система «статический преобразователь - двигатель») - ЭП, в состав которых входят элек- тромашинные (статические) преобразователи электроэнергии; • ЭП с релейно-контакторным (бесконтактным) управлением, система управления которыми реализована на основе релейноконтакторной (бесконтактной) аппаратуры; • ЭП с мехатронным модулем, объединяющим двигатель с электронными и электромеханическими компонентами управления, диагностики и защиты; • редукторный (безредукторный) ЭП, механическая передача которых содержит (не содержит) редуктор; • маховичный ЭП, механическая передача которых содержит маховик; • дифференциальный ЭП, представляющий собой многодвигательный ЭП, в котором скорость и момент двигателей алгебраически суммируются с помощью механического дифференциала; • ЭП с тормозным устройством (управляемой муфтой), механическая передача которых содержит тормозное устройство (управляемую муфту). Общие характеристики. Различают три вида основных характеристик электропривода: • статические характеристики; • энергетические характеристики; • динамические характеристики. Статические характеристики. Это характеристики при установившемся режиме работы ЭП, когда скорость на выходе постоянна. В этом случае, как это следует из основного закона движения (1.1), момент, развиваемый двигателем на валу (M), равен приведенному моменту нагрузки (Мн). В качестве статических характеристик в основном рассматриваются механические характеристики - зависимость скорости на выходе от момента при различных напряжениях Uз (Uз выступает в качестве параметра) и регулировочные характеристики - зависимости скорости вращения от напряжения на входе при различных значениях момента нагрузки (МН ыступает в качестве пара метра). На рис. 1. в качестве примера показаны механические регулировочные характеристики ЭП постоянного тока.  Рисунок 1. Типовые механическая и регулировочнаяхарактеристики электропривода В установившемся режиме качество электропривода характеризуется следующими параметрами: · жесткостью механической характеристики (); · коэффициентом передачи (усиления) () регулировочной характеристики. Заметим, что жесткость и коэффициент передачи могут быть постоянными в линейных системах и изменяться от точки к точке в нелинейных системах; · диапазоном регулирования по скорости на выходе электропривода ( при МН = const). Энергетические характеристики электропривода. К энергетическим характеристикам электропривода относятся рабочие характеристики, то есть зависимости тока, активной, реактивной и полной мощности, потребляемой от источника питания, от мощности на выходе электропривода (от мощности нагрузки): I1, P1, Q, S = f(P2). Эти характеристики определяют к.п.д. () и коэффициент мощности () электропривода. К энергетическим характеристикам также относятся зависимости средних, действующих и амплитудных токов через полупроводниковые элементы преобразователя от момента, скорости и мощности на выходе электропривода. Динамические характеристики В качестве динамических характеристик обычно рассматриваются зависимости изменения скорости от времени на выходе ЭП при скачкообразном изменении входного задающего сигнала (характеристики по управлению) и при скачкообразном изменении момента нагрузки (характеристика по возмущению). На рис. 2. в качестве примера показана динамическая характеристика ЭП по управлению. В качестве параметра в динамических режимах рассматривается электромеханическая постоянная времени - это время, в течение которого ЭП разгоняется от неподвижного состояния до скорости идеального холостого хода под действием неизменного момента, равного моменту короткого замыкания (пускового момента). В этом случае, интегрируя основное уравнение движения, получим:  В динамическом режиме качество электропривода характеризуется следующими параметрами (см. рис. 2.): · временем первого согласования t-1; · перерегулированием ; · временем переходного процесса tp.  Рисунок 2. Параметры переходного процесса в электроприводе Механические характеристики рабочих машин и электродвигателей. Определения, уравнения, графические изображения, понятия жесткости. При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах. Механической характеристикой механизма называют зависимость между угловой скоростью и моментом сопротивления механизма, приведенными к валу двигателя) ω = f(Mс).  Рис. 3. Механические характеристики механизмов Среди всего многообразия выделяют несколько характерных типов механических характеристик механизмов: 1. Характеристика с моментом сопротивления, не зависящим от скорости (прямая 1 на рис. 3). Независимая от скорости механическая характеристика графически изображается прямой, параллельной оси вращения, в данном случае вертикалью. Такой характеристикой обладают, например, подъемные краны, лебедки, поршневые насосы при неизменной высоте подачи и др. 2. Характеристика с моментом сопротивления линейно зависящим от скорости (прямая 2 на рис. 3). Такая зависимость присуща, например, приводу генератора постоянного тока с независимым возбуждением, работающему на постоянную нагрузку. 3. Характеристика с нелинейным возрастанием момента (кривая 3 на рис.31). Типичными примерами емогут служить характеристики вентиляторов, центробежных насосов, гребных винтов. Для этих механизмов момент Мс зависит от квадрата угловой скорости ω. Это т.н. параболичская (вентиляторная) механическая характеристика. 4. Характеристика с нелинейно спадающим моментом сопротивления (кривая 4 на рис. 3). Здесь момент сопротивления обратно пропорционален скорости вращения. Мощность в этом случае остается постоянной на всем диапазоне рабочей скорости механизма. Например, у механизмов главного движения некоторых металлорежущих станков (токарных, фрезерных, расточных) момент Мс изменяется обратно пропорционально ω, а мощность потребляемая механизмом, остается постоянной. Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента ωд = f(M). Здесь следует иметь ввиду, что момент М на валу двигателя независимо от направления вращения имеет положительный знак - момент движущий. Вместе с тем момент сопротивления Мс имеет знак отрицательный. В качестве примеров на рис. 4 приведены механические характеристики: 1 - синхронного двигателя; 2 – двигателя постоянного тока независимого возбуждения; 3 – двигателя постоянного тока последовательного возбуждения. |