Электропривод. Контрольная работа 1 Дисциплина Электропривод и преобразователи подвижного состава
 Скачать 371.16 Kb. Скачать 371.16 Kb.
|

 Рис. 4. Механические характеристики электродвигателей Для оценки свойств механических характеристик электропривода используют понятие жесткости характеристики. Жесткость механической характеристики определяется по выражению β = dМ /dω где dМ – изменение момента двигателя; dωд – соответствующее изменение угловой скорости. Для линейных характеристик значение β остается постоянным, для нелинейных – зависит от рабочей точки. Используя это понятие, характеристики, приведенные на рис. 4, можно качественно оценить так: 1 – абсолютно жесткая (β = ∞); 2 – жесткая; 3 – мягкая. Абсолютно жесткая характеристика - скорость вращения двигателя остается неизменной при изменении нагрузки двигателя в пределах от нуля для номинальной. Такой характеристикой обладают синхронные двигатели. Жесткая характеристика - скорость вращения меняется незначительно при изменении нагрузки от нуля до номинальной. Такой характеристикой обладает двигатель постоянного тока с параллельным возбуждением, а также асинхронный двигатель в области линейной части характеристики. Жесткой характеристикой принято считать такую, у которой изменение скорости не превышает приблизительно 10% номинальной скорости при изменении нагрузки от нуля до номинальной. Мягкая характеристика - скорость вращения двигателя меняется значительно при сравнительно небольших изменениях нагрузки. Такой характеристикой обладает двигатель постоянного тока с последовательным, смешанным или с параллельным возбуждением, но с добавочным сопротивлением в цепи якоря, а также асинхронный с сопротивлением в цепи ротора. Для большинства производственных механизмов используют асинхронные двигатели с короткозамкнутым ротором, имеющие жесткую механическую характеристику. Все механические характеристики электродвигателей делятся на естественные и искусственные. Естественная механическая характеристика относится к условиям работы двигателя с номинальными значениями параметров. Например, для двигателя с параллельным возбуждением естественная характеристика может быть построена для случая, когда напряжение на якоре и ток возбуждения имеют номинальные значения, а в цепи якоря отсутствует добавочное сопротивление. Естественная характеристика асинхронного двигателя соответствует номинальному напряжению и номинальной частоте переменного тока, подводимого к статору двигателя при условия отсутствия добавочного сопротивления в цепи ротора. Таким образом, для каждого двигателя естественная характеристика может быть построена только одна, а искусственных - неограниченное количество. Например, каждому новому значению сопротивления якоря двигателя постоянного тока или в цепи ротора асинхронного двигателя отвечает своя механическая характеристика. 3. Искусственные механические характеристики 3-х фазного асинхронного электродвигателя при измерении частоты тока и активного сопротивления в обмотке ротора. Включение симметричных активных сопротивлений в цепь ротора широко используется для ограничения пусковых токов и для изменения вида механической характеристики асинхронного двигателя с фазным ротором. Эти двигатели используются в электроприводах подъёмных, транспортных и металлургических установок, а также в приводах вентиляторов, насосов, компрессоров и т.д. Добавочное сопротивление  . .Вследствие этого у двигателей с контактными кольцами при введении сопротивления в цепь ротора максимум кривой момента смещается в сторону больших скольжений и механические характеристики будут располагаться ниже естественной (рис. 4.6). Соответствующим выборам 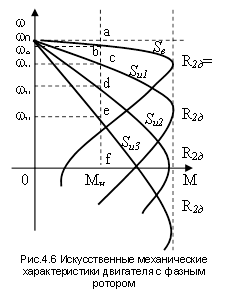 Приближенно реостатные характеристики в рабочей их части могут быть приняты линейными. Это дает возможность при расчете сопротивлений, включаемых в ротор асинхронного двигателя, пользоваться методами, аналогичными методам, применяемым для двигателя постоянного тока независимого возбуждения. Обычно требуется определить сопротивление дополнительного резистора Искомое значение В то же время, считая характеристики в рабочей части линейными, можно записать, что Отсюда Если искусственная характеристика заданна рабочей частью, то можно использовать метод отрезков, рассмотренный ранее для двигателей постоянного тока. Для этого проводится вертикальная линия при М=МН и отмечаются точки пересечения с характеристиками. Считая, что отрезки пропорциональны сопротивлениям в роторе, т.е. Сопротивление искомых резисторов может быть найдено Если отсутствуют каталожные данные сопротивления обмотки ротора, оно может быть рассчитано либо найдено по методу отрезков где Увеличение активного сопротивления вторичного контура улучшает 4. Способы уменьшения пусковых токов 3-х фазных АД с короткозамкнутым ротором. При пуске АД приходится сталкиваться с двумя проблемами: - Создание необходимого для успешного запуска начального (пускового) электромагнитного момента; - Ограничение пусковых токов, которые у АД превышают номинальное значение в 10 и более раз. В начальный момент запуска АД (ротор неподвижен) ток в обмотке ротора принимает наибольшее значение, равное пусковому току. При этом величина пускового тока может оказаться недопустимо большой и привести к перегреву двигателя и как следствие к преждевременному выходу из строя его изоляции. Таким образом, для обеспечения успешного и качественного запуска АД необходимо ограничить пусковой ток при одновременном увеличении пускового момента. Поэтому для АД принимают следующие способы запуска: 1) Для короткозамкнутых АД малой мощности обычно применяют, так называемый, прямой пуск; 2) Для короткозамкнутых АД средней мощности, не требующих частого запуска, применяют способы пуска, связанные со снижением напряжения подводимого к статору a) Переключение со звезды на треугольник; b) Реакторный пуск; c) Автотрансформаторный пуск. 3) Для короткозамкнутых АД большой мощности в настоящее время применяют частотный запуск, который заключается в том, что пуск начинают при минимальном напряжении и частоте питающей сети. По мере разгона двигателя частоту и напряжение увеличивают, заканчивают пуск при номинальных значениях частоты и напряжения; 4) Для АД с фазным ротором средней и большой мощности используют реостатный пуск. Одной из наиболее эффективных категорий устройств, облегчающих тяжелые условия пуска, являются софтстартеры и частотные преобразователи. Особенно ценным считается их свойство поддерживать пусковой ток двигателей переменного тока в течение продолжительного периода — более минуты. Также пусковой ток асинхронного электродвигателя можно уменьшить за счет внедрения внешнего сопротивления в обмотку ротора. 5. Потери электроэнергии при пуске асинхронного электродвигателя без нагрузки. В энергетике электропривода важное место занимают вопросы потребления, расхода и потерь электроэнергии при ее преобразовании в механическую энергию. Если пренебречь потерями в стали и механическими потерями из-за их относительной малости, а также пренебречь влиянием тока холостого хода (при этом I1 = I’2), то потери энергии при пуске асинхронного двигателя в цепях статора и ротора можно определить следующим образом: При пуске двигателя без нагрузки Мс=0 и потери мощности в цепи ротора: Поэтому при пуске двигателя из неподвижного состояния до синхронной скорости потери энергии будут равны: где J -приведенный момент инерции системы, кг*м2; R1 - сопротивление статорной цепи, Ом; R'2 - приведенное к статору сопротивление роторной цепи. 1. Регулирование частоты вращения электроприводов. Диапазон регулирования. Плавность регулирования. Жесткость характеристик. Зависимость момента и мощности от угловой скорости при различных способах регулирования. 6. Схема управления асинхронным двигателем с короткозамкнутым ротором Управлять асинхронными электродвигателями с короткозамкнутым ротором можно посредством контакторов. При использовании маломощных электродвигателей, для которых нет необходимости ограничивать пусковой ток, запуск производится при действующем напряжении. Нереверсивная схема управления асинхронного двигателя. 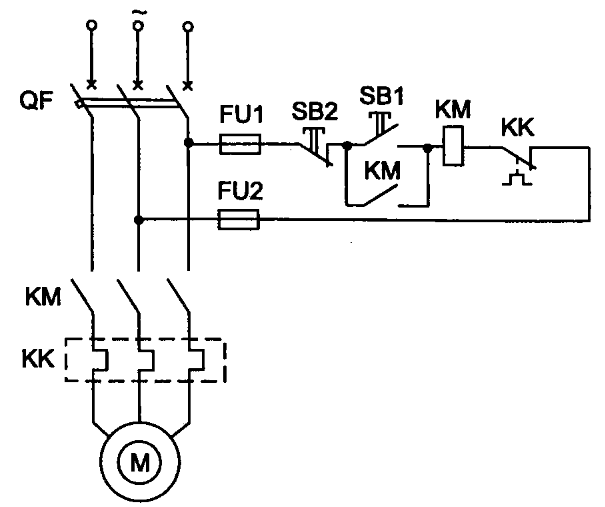 Рисунок 1 — Простейшая схема асинхронного двигателя Для подачи напряжения на управляющую и силовую цепь используется автоматический выключатель QF. Пуск асинхронного двигателя осуществляется кнопкой SB1 «Пуск”, которая замыкает свои контакты в цепи катушки магнитного пускателя КМ. Который срабатывая замыкает основные контакты силовой цепи статора. Вследствие чего электродвигатель М подсоединяется к питанию. В то же время в управляющей сети происходит замыкание блокирующего контакта КМ который шунтирует кнопку SB1. Чтобы отключить асинхронный двигатель с кз ротором, необходимо нажать клавишу SB2 «Стоп». При этом питающая сеть контактора КМ размыкается и подача напряжения на статор прекращается. После этого нужно выключают автомат QF. Схема управления АД с кз предусматривает несколько защит: от КЗ — посредством автоматического выключателя QF и плавкими предохранителями FU; от перегрузок — посредством теплореле КК (при перегреве данные устройства отсоединяют контактор КМ, прекращая работу движка); нулевая защита — посредством магнитного пускателя КМ (при низком напряжении или его полном отсутствии контактор КМ оказывается незапитанным, размыкается и электродвигатель выключается). Для подключения электродвигателя после срабатывания защитного механизма требуется снова надавить клавишу SB1. Реостатный пуск асинхронного двигателя с кз ротором. Если невозможно запустить АД с кз ротором в стандартном режиме, используют запуск при сниженном напряжении. С этой целью в цепь статора добавляют сопротивление, реостат или используют автотрансформатор. Автоматический выключатель QF срабатывает и на управляющую и силовую цепь поступает напряжение. После нажатия кнопки SB1 пускатель КМ1 приходит в действие, подавая электроток в цепь статора с включенным сопротивлением. В то же время питание поступает и на реле времени КТ. 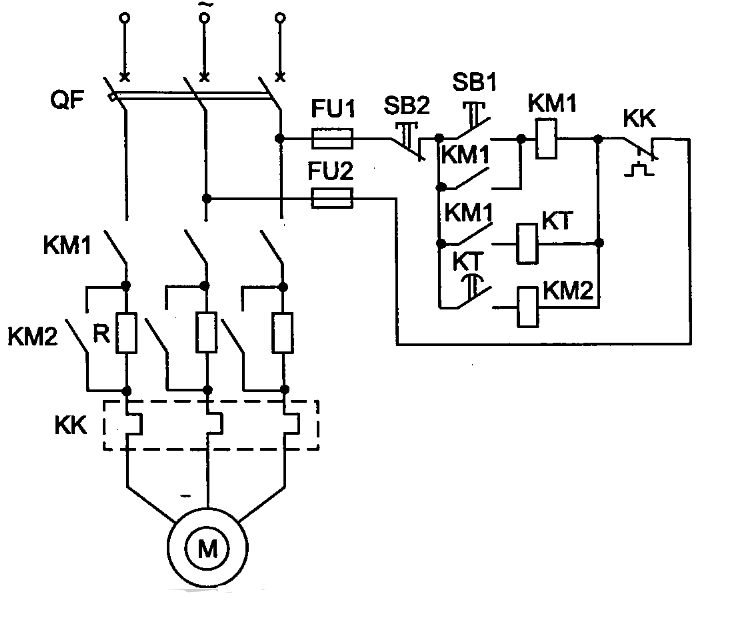 Рисунок 2 — Схема асинхронного двигателя с симметричными сопротивлениями (реостатный пуск) Через определенный временной интервал, задаваемый реле КТ, происходит замыкание контакта КТ. В итоге пускатель КМ2 шунтирует (закорачивает) сопротивление статора. Процедура запуска электродвигателя завершается. Для его выключения необходимо нажать клавишу SB2 и выключить автомат QF. Реверсивный пуск асинхронного двигателя 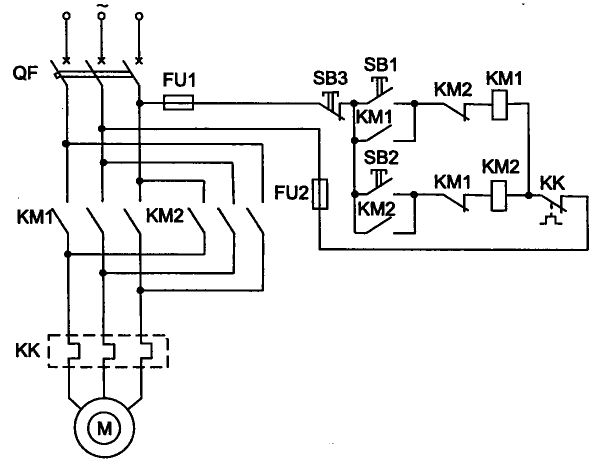 Рисунок 3. Схема реверсивный пуск асинхронного двигателя с кз ротором. Данная схема дает возможность производить запуск электродвигателя и изменять направленность его вращения. Для запуска необходимо включить автомат QF и нажать SB1 «Пуск», в результате чего ток поступает на магнитный пускатель КМ1, который запитывает статор. АД реверсируется последовательным нажатием кнопок «Стоп» SB3 (КМ1 выключается и двигатель останавливается) и «Реверс» SB2 (срабатывает КМ2 и асинхронный двигатель запускается в реверсивном направлении). В данной схеме нажатием кнопки реверса меняется чередование фаз питающего напряжения на статоре двигателя, что будет вызывать смену направленности его вращения (реверсом). При помощи нормально замкнутых контактов КМ1 и КМ2 выполнена защита от ошибочного включения сразу двух магнитных пускателей КМ1 и КМ2. Также действуют защиты, аналогичные описанным ранее. Отключить электродвигатель можно кнопкой SB3 и автоматом QF. |