Контрольная работа Вариант 37 (схема 3, вариант данных 7) Задания Д1, Д4 Задание Д1 Интегрирование дифференциальных уравнений движения материальной точки, находящиеся под действием постоянных сил
 Скачать 0.53 Mb. Скачать 0.53 Mb.
|

|
Контрольная работа Вариант 37 (схема 3, вариант данных 7) Задания Д1, Д4 Задание Д1 Интегрирование дифференциальных уравнений движения материальной точки, находящиеся под действием постоянных сил Тело движется из точки А по участку АВ (длиной l) наклонной плоскости, составляющей угол α с горизонтом, в течение τ с. Его начальная скорость Исходные данные и параметры, которые требуется определить, взять из табл.3.2 и рис. 3.8. Считать Исходные данные: 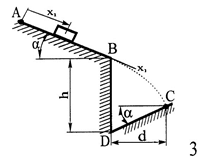 Рис.3.8 Дано: Найти: Решение 1. В связи с тем, что при движении материальной точки от А к С силы различны на участках АВ и ВС, разделим траекторию движения точки на части и рассмотрим ее движение на участке АВ (рис.1). На тело действуют силы: сила тяжести Составим дифференциальное уравнение движения тела на участке АВ: Сила трения где Таким образом, или Интегрируя дифференциальное уравнение дважды, получим  . .Для определения постоянных интегрирования воспользуемся начальными условиями задачи: Составим уравнения, полученные при интегрировании, для Таким образом, уравнения движения тела на участке АВ имеют вид  . .Для момента времени  . .Из первого уравнения выражаем скорость  ; ; , ,откуда находим скорость тела в точке В  м/с. м/с.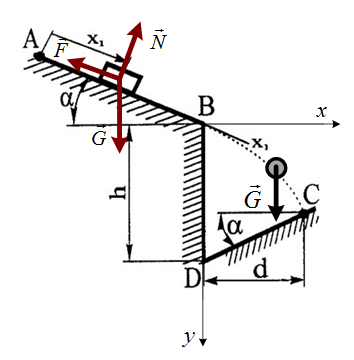 Рис.1. Расчетная схема к заданию Д1 2. Рассмотрим ее движение на участке ВС (рис.1). На тело действует сила тяжести Интегрируем первое уравнение. Тогда получим Постоянные интегрирования Таким образом, уравнения движения тела в горизонтальном направлении Интегрируя уравнение  . .Начальные условия  . (4) . (4)Время  с. с.Высоту Тогда получим  , ,откуда   м. м.Скорость тела при падении в точке С найдем через проекции скорости на оси координат – уравнения (1) и (3): Для момента времени Абсолютное значение скорости тела в точке С будет равно Ответ: Задание Д4 Применение теоремы об изменении кинетической энергии к изучению движения механической системы Механическая система (рис 3.16) состоит из грузов 1 и 2, катка 3, шкивов 4 и 5 радиусами R4=0,4м, r4=0,2 м, R5=0,5 м, r5=0,1 м соответственно. Каток считать сплошными однородным цилиндром, а массу шкивов считать распределенной по ободу. Коэффициент трения грузов о плоскость f=0,1. Тела системы соединены друг с другом нитями, участки нитей параллельны соответствующим плоскостям. Под действием силы F=f(t), зависящей от перемещения S точки ее приложения, система приходит в движение из состояния покоя. При движении на шкивы 4 и 5 действуют постоянный момент М1, М2 сил сопротивления соответственно. Определить значение искомой величины в тот момент времени, когда перемещение S станет равным S1. Искомые величины указана в столбце «Найти» таблицы 3.5. Исходные данные: 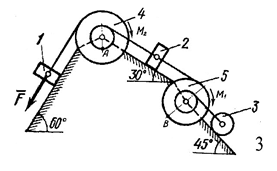 Рис. 3.16 Таблица 6
Решение 1. Рассмотрим движение неизменяемой механической системы, состоящей из весомых тел 1, 2, 3, 4, 5, соединенных нитями. Изобразим действующие на систему внешние силы: активные Для решения задачи можно определить скорость любого тела механической системы и далее, используя кинематические связи тел механизма, найти требуемы скорости. Определим вначале скорость груза 2 Для определения скорости 2. Определяем Учитывая, что тела 1 и 2 движутся поступательно, тела 4 и 5 вращается вокруг неподвижной оси, а тело 3 совершает плоскопараллельное движение, получим Все входящие сюда скорости необходимо выразить через искомую  ; ; ; ; . (4) . (4)Кроме того, входящие в (3) моменты инерции имеют значения: Подставив все величины (4) и (5) в равенства (3), а затем, используя равенство (2), получим окончательно   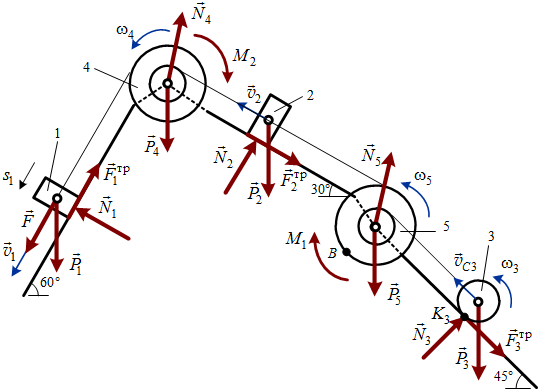 Рис.2. Расчетная схема к заданию Д4 3. Далее найдем сумму работ всех действующих внешних сил при перемещении, которое будет иметь система, когда тело 1 (к нему приложена сила F=f(t))пройдет путь Тогда получим  ; ;Работы остальных сил равны нулю, так как точки, где приложены силы Величины  ; ; ; ;При найденных значениях линейных у угловых перемещений для суммы вычисленных работ получим Подставляя выражения (6) и (7) в уравнение (1) и учитывая, что откуда скорость тела 2 будет равна  м/с. м/с.Зная Ответ: Список использованной литературы 1. Черкасов В.Г., Петухова И.И. Теоретическая механика. Учебное пособие. Чита: ЗабГУ, 2015. 2. Бать М.И. Теоретическая механика в примерах и задачах. М.: Наука, 2007. |