дипломная работа. ДП-конвейер. Конвейерлер туралы жалпы малматтар
 Скачать 1.78 Mb. Скачать 1.78 Mb.
|

|
1.3 Конвейерлердің электр жетектеріне және басқару жүйелеріне қойылатын талаптар Конвейерлік қондырғылардың жұмыс істеу жағдайларын қарастыру олардың электр жетектері мен басқару жүйелеріне қойылатын талаптарды анықтауға мүмкіндік береді. Бұл талаптар олардың статикалық және динамикалық ерекшеліктері мен қасиеттерін ескереді [3,4]. Конвейерлік қондырғылардың электр жетектері олардың жұмысын айнымалы жүктеме жағдайында қозғалыс бағытын өзгертпей ұзақ уақыт бойы қамтамасыз ету керек. Кейбір жағдайда, мысалы, конвейер еңіске қарай жұмыс жасағанда, электр жетегі қозғалтқыштық режимінде де, тежеу режимінде де жұмыс жасауы керек . Ұзақ уақыт бойы айнымалы жүктемемен жұмыс жасайтын магистралдық конвейерлер үшін жүк салынатын тармақты тұрақты жүктемемен қамтамасыз ету үшін тартушы органның жылдамдығын реттеу тиімді саналады. Бұл конвейердің энергетикалық тиімділігін арттырады, тарушы органның жүрісін азайтады, демек, қымбат тұратын конвейерлік лентаның ресурсын жоғарлатады. Көпжетекті конвейерлер үшін электрлік жетек қозғалтқыштардың біркелкі жүктелуін және лентаның барабан бойымен бос сырғанап кетпеуін қамтамасыз етуі керек. Динамикалық жүктемені шектеу және лентаның барабанмен жақсы жапсарласуын қамтамасыз ету үшін электр жетегі жүргізіп жіберу кезінде үдеуді белгілі бір деңгейде шектеуі және тербелмелі динамикалық жүктемені жоюы керек. Жайлап жүргізуді және лентаның жылдамдығын реттеу, динамикалық жүктемені шектеу үшін реттелетін электр жетегін қолданған жағдайда жылдамдықты реттеу диапазоны 10:1 болуы керек [3,4]. 1.4 Конвейерлік қондырғылардың реттелмейтін электр жетектері Конвейерлік қондырғылардың электр жетегі жүйесін таңдағанда асинхрондық қозғалтқыш негізіндегі электр жетектері кеңінен қолданатындығын ескеру керек. Әдетте өнімділігі үлкен емес қысқа конвейерлерде жүргізіп жіберу моменті үлкейтілген, терең ойықты қысқаша тұйықталған роторлы немесе роторы қосарланған «ақтиін» тор тәріздес болатын асинхрондық қозғалтқыштар қолданылады [3,4]. Мұндай электр жетектердің қуаты 100-200 кВт аспайды, өйткені желіде кернеудің түсуіне байланысты жүргізіп жіберу моменті айтарлықтай азаяды. Бұл жүк тиелген конвейерді орнынан қозғалтуды қиындатады. Өнімділігі үлкен, ұзын конвейерлерде жүргізіп жіберу тогын және үдеуді шектеуді қамтамасыз ететін фазалы роторлы асинхрондық қозғалтқыштар қолданылады. Бұл жағдайда динамикалық жүктемені азайту үшін жүргізіп жіберу сатыларын қолданады. Жүргізіп жіберу сатыларын ауыстырған кезде қозғалтқыштың моменттің өсуі азаяды және лентаның барабан бойымен бос сырғанауы жойылады. Конвейерлік қондырғыларда жүргізіп жіберу сатысының саны 10-12 тең контакторлық сұлбалар қолданылады [3,4]. Жайлап жүргізіп жіберудің релелік-контакторлық құрылғыларының кемшілігі - жүргізіп жіберу үрдісі кезінде жүргізіп жіберу резисторларында үлкен энергияның шығыны орын алады. Қазіргі кезде жайлап жүргізіп жіберу құрылғылары (ЖЖЖҚ) кең тарай бастады. Бұл құрылғыларды қолданған кезде жүргізіп жіберу тогын және бұрыштық үдеуді шектей отырып, жайлап жүргізіп жіберу, орындаушы механизмдерді механикалық соққыдан қорғау, үдеу және тежеу уақытын реттеу жүзеге асырылады. ЖЖЖҚ - қозғалтқыштың статор орамасына қосылатын жартылай өткізгіштік кернеу реттеуіш. Кернеуді өзгерту қарсы-параллель сұлбасы бойынша жалғанған тиристорлардың ашылу бұрышын өзгерту арқылы жүзеге асырылады. ЖЖЖҚ-ның функционалды сұлбасы 4 суретте көрсетілген [5]. Микроконтроллер негізгі құрылғы болып саналады, ол тиристорлардың ашылуын, релелердің жұмысын басқарады және ЖЖЖҚ мен қозғалтқышты қорғау мен қадағалау қызметін атқарады. Кернеуді біртіндеп көбейту және бір мезгілде токты немесе моментті реттей отырып, қозғалтқышты жүргізіп жібереді. ЖЖЖҚ мынадай басқару тәсілдерін жүзеге асырылады: статор орамасына берілетін кернеуді реттеу тәсілі, қозғалтқыштың тогын реттеу тәсілі, қозғалтқыштың моментін реттеу тәсілі. Қозғалтқыштың моментін реттеу тәсілі өте тиімді тәсіл болып табылады. Жылдамдықтың уақытқа тәуелді өзгерісі сызықты болады. ЖЖЖҚ- да үш түрлі тежеу тәсілі қарастырылған.  ТК - тиристорлық коммутатор; АД - асинхрондық қозғалтқыш; СУ - басқару жүйесі; ФИ - тиристорларды басқаруға арналған драйверлер; МК - микроконтроллер; УВВ - ендіру-шығару құрылғысы; ПУ - басқару пульті; ИП – қоректендіру көзі; ДТ1,ДТ2, ДТ3 - ток датчиктері; ДН1, ДН2 - кернеу датчиктері. 1.4 сурет - Жайлап жүргізіп жіберу құрылғысының (ЖЖЖҚ) функционалды сұлбасы 1.5 Конвейерлік қондырғылардың реттелетін электр жетектері Конвейерлік қондырғыларда релелік-контакторлық сұлбаларды және ЖЖЖҚ қолдану тек жүргізіп жіберу үрдістерін қамтамасыз етеді. Қазіргі кезде асинхрондық және синхрондық қозғалтқыштарды қолдануға негізделген жиіліктік реттелетін электр жетектердің болашағы зор. Синхрондық жиіліктік реттелетін электр жетектер шығыстық кернеуі 6 және 10 кВ болатын жоғары вольтті жиіліктік түрлендіргіштер негізінде жасалады [3,5]. Қолданылатын қозғалтқыштардың кернеуіне сәйкес асинхрондық жиіліктік реттелетін электр жетектер кернеулері 0,4; 0,69; 1,19; 3,0 (3,3); 6,0 (6,3; 6,6); 10,0 (10,5) кВ болатын жиіліктік түрлендіргіштер негізінде жасалады. Ленталы конвейерлердің жылдамдығын реттеу және динамикалық жүктемені шектеу үшін жылдамдық реттеу диапазоны 10:1 болуына байланысты екітрансформаторлы жиіліктік түрлендіргіштерді оларда қолдануға болмайды. Өйткені реттеу диапазоны 1,5:1 болған кезде-ақ жоғарлатқыш трансформатор жиілік төмен болғандықтан қанығу режиміне кіреді. Ал бұл өз кезегінде қуат шығынының көбеюіне себеп болады. Кернеуі 1,19кВ дейінгі төменгі вольтті түрлендіргіштер және кернеуі 10кВ дейінгі жоғарғы вольтті түрлендіргіштер ІGBT транзисторлары негізіндегі кернеу инверторларымен және ПИД-реттеуіштерімен жабдықталады. 1.5 суретте ІGBT транзисторлары негізіндегі автономды инвертормен жабдықталған төменгі вольтті асинхрондық жиіліктік реттелетін электр жетегінің сұлбасы келтірілген [5]. .  1.5 сурет - ІGBT транзисторлары негізіндегі автономды инвертормен жабдықталған төменгі вольтті асинхрондық жиіліктік реттелетін электр жетегінің сұлбасы Микроконтроллерлік жүйе басқару, қорғау және бақылау қызметтерін атқарады. Басқару жүйесі мынадай негізгі қызмет атқарады: - түрлендіргіштің барлы элементтерінің жұмысын тікелей сандық басқару; - қозғалтқыш моделін қалыптастырады; - жылдамдықты бағдарламалық басқару немесес технологиялық айнымалыны уақытқа (сағаттық, тәуліктік, апталық) тәуелді басқару; - тұрақты ток буынындағы конденсаторлық батереяны жайлап зарядтау үшін кірістік тиристорлық түрлендіргішті басқару; - балластлық резисторда сыртқа тарайтын тежеу энергиясын қабылдауды басқару. Қорғау және бақылау жүйесі мынадай қызметтер атқарады: - драйверлердің қоректендіру тізбегінде қысқаша тұйықталудан және кернеудің жоғалуынан қорғауды басқарады; - тұрақты ток буынында токтың қашуын және артық кернеудің болуын бақылайды; - қозғалтқыштың және инвертордың артық қызуын бақылайды; - фазалардың үзілуінен және біркелкі еместігінен қорғауды басқарады; - максимал-токтық және уақыт-токтық қорғау жүйелерін басқарады. ІGBT транзисторлары негізіндегі кернеу инверторларымен жабдықталған жоғарғы вольтті түрлендіргіштер көпфазалы кірістік трансформатормен, күштік блоктармен және басқарудың, қорғаудың және бақылаудың микроконтроллерлік жүйесінен тұрады. Қазіргі кезде трансформатор қолданылмайтын жиіліктік түрлендіргіштер кең тарай бастады. Конвейерлік қондырғылардың тарту органының жылдамдығын реттеу үшін жиіліктік түрлендіргіштер таңдаған кезде мынадай ережелерге сүйену керек: - жетектік қозғалтқыштың номинал кернеуі жиіліктік түрлендіргіштің номинал кернеуіне сәйкес келуі керек; - жиіліктік түрлендіргіштің номинал қуаты (тогы) қозғалтқыштың номинал қуатына (тогына) сәйкес келу керек; - бірнеше қозғалтқыштарды тек кернеу инверторы бар жиіліктік түрлендіргіштерге ғана параллель қосуға болады; - ток инверторы бар жиіліктік түрлендіргіш жеке қозғалтқышпен жұмыс жасауға арналған, яғни оған бір ғана қозғалтқыш қосуға болады; - газ және шаң бойынша қауіпті болатын шахталарда жарылыстан қорғалған жиіліктік түрлендіргіштер қолданған жөн. 2 Конвейердің электр жетегінің қозғалтқышын таңдау және оның параметрлерін есептеу 2.1 Есептеуге қажет бастапқы деректер және конвейердің типін таңдау Тасылатын заттардың мөлшері Q=125 т/сағ. Тасу ұзындығы L=50 м Көтеру биіктігі Н=20 м. Қозғалу жылдамдығы v=1,4 м/с. Бұл тапсырманы орындау үшін ЛК-800 типті ленталы конвейерді таңдаймыз. Оның техникалық көрсеткіштері төмендегідей: - өнімділігі (Q) 420 м3/сағ. дейін; - ұзындығы (Lк) 50 м дейін; - қозғалу жылдамдығы v=1,4 м/с; - лентаның ені В=800 мм; - барабанының диаметрі Dб=0,6 м; - көлбеу бұрышы β 350 дейін; - редуктордың беріліс коэффициенті іб=17. ЛК-800 типті ленталы конвейер бір қозғалтқышы бар, бір барабанды жетекпен жабдықталған. 2.2 Жүктемелерді, инерцияның моменттерін есептеу және конвейердің электрқозғалтқыш таңдау Конвейерге қажетті қуат Рк мына өрнек бойынша анықталады [6]:  (2.1) (2.1)мұндағы К- қосымша шығын коэффициенті, Lк=50м болғандықтан К=1,05[6]; ΔРл - лента қозғалған кездегі қуат шығыны, кВт; Ркоз - жүкті қозғалту қуаты, кВт; Ркот - жүкті көтеру қуаты, кВт. Лента қозғалған кездегі қуат шығыны мына формула бойынша анықталады [6]:  (2.2) (2.2)мұндағы Сүй – лентаның тіреуішке үйкеліс коэффициенті; Lгор – конвейердің горизонталь проекциясы, м (6 сурет ); vл – лентаныңқозғалысының сызықты жылдамдығы, vл =1,4 м/с. Лентаның тіреуішке үйкеліс коэффициенті Сүй лентаның еніне В және тіреуіштер түріне тәуелді. В=800 мм болғанда және тіреуіштер ретінде роликтерді қолданған кезде Сүй=0,028 тең [6]. Конвейердің горизонтқа көлбеу бұрышын анықтаймыз (1.6 сурет):  (2.3) (2.3)Бұл бұрыш β=23,580 < βмакс=350, яғни конвейердің көлбеулілігі рұхсат етілген аймақта. Конвейердің горизонталь проекциясын Lгор анықтаймыз [6 ]: Lгор=Lк∙сosβ=50∙сos23,580= 45,82 м. (2.4) 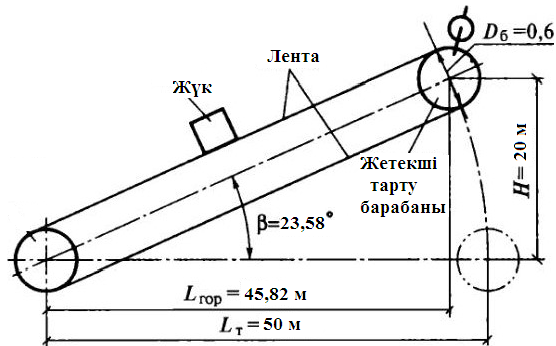 1.6 сурет – Ленталы конвейердің есептік сұлбасы Лента қозғалған кездегі қуат шығыны [6]:  кВт. кВт.Жүкті қозғалту қуатын Ркоз есептейміз [6]: Ркоз=15∙10-5∙ Lгор=15∙10-5∙45,82=0,0069 кВт. (2.5) Жүкті көтеру қуатын Ркот мына формула арқылы анықтаймыз [6]: Ркот = 272∙10-5∙Q∙H=272∙10-5∙125∙20=6,8 кВт. (2.6) Конвейерге қажетті қуат Рк (2.1) өрнек бойынша анықталады :  Конвейердің қозғалтқышының есептік қуатын мына өрнек бойынша анықталады [6]:
мұндағы Кк – қор коэффициенті, Кк=1,23 етіп қабылдаймыз [6]; ηб –беріліс ПӘК-і, ηб =0,75 [6 ]. Жетектің электрқозғалтқышының есептік синхрондық жылдамдығын (nсе) анықтаймыз:
мұндағы іб – редуктордың беріліс саны; Dб=0,6 м - барабанның диаметрі. Синхрондық жылдамдықтардың шкаласы бойынша қабылдаймыз: nс=750 айн/мин. Есептеу нәтижелері бойынша 4АK200M8У3 типті фазалы роторлы асинхронды қозғалтқышы таңдалды, оның техникалық параметрлері 1.2 кестеде келтірілген. 1.2 кесте - 4АK200M8У3 типті АҚ техникалық параметрлері
Жүктің 1 метр лентаға түсетін массасын анықтаймыз:
мұндағы Q=125 т/сағ – конвейердің өнімділігі; vл – лентаның жылдамдығы. ЛК-800 типті конвейерде төрт қабатты 2ШТК-200–4,5х3,5 типті резинка-маталық лента қолданылады. Мұндай лентаның меншікті массасы mл= 18,4 кг/м2. Бұл жағдайда 1 метр лентаның массасы:  B∙mл=0,8∙18,4=14,72 кг/м, (2.10) B∙mл=0,8∙18,4=14,72 кг/м, (2.10)мұндағы В=0,8м (800 мм) – лентаның ені. Конвейерде диаметрі 127 мм, массасы 22 кг астау тәріздес ролик-тіреуіштер қолданады. Жүк тұратын тармақтың роликтерінің айналатын бөліктерінің меншікті массасын анықтаймыз:
мұндағы  - роликтердің арақашықтығы, м. - роликтердің арақашықтығы, м.Жүксіз тармақтың роликтерінің айналатын бөліктерінің меншікті массасын анықтаймыз:
Қорытынды тарту күшін анықтаймыз [6]: F∑=9,81∙Kқос∙(qж+ 2qл+ qр qр)∙L∙wсosβ+9,81∙ qл∙ L∙sіnβ= =9,81∙2,0(24,3+2∙14,72+15,71+7,91)∙50∙0,03∙0,916+ +9,81∙14,72∙50∙0,3=4251,51 Н, (2.13) мұндағы Kқос – қосымша кедергі коэффициенті, конвейердің ұзындығы L=50 м болғанда Kқос ≈2,0. Қозғалтқыштың жылдамдығына келтірілген статикалық кедергінің моментін анықтаймыз:
Барабанның бұрыштық жылдамдығын анықтаймыз:
Қозғалтқыштың жылдамдығына келтірілген барабанның бұрыштық жылдамдығын анықтаймыз:
Қозғалтқыштың есептің қуатын анықтап, оны таңдалған қозғалтқыштың қуатымен салыстырамыз: Рес=кк∙Мк∙ωқоз∙10-3=1,25∙100,03∙79,33∙10-3 = 9,92 кВт < 15 кВт. (2.17) Есептеу нәтижесі есептік қуаттың қозғалтқыштың қуатына сәйкес келетінін көреміз. Электр жетегінің инерциясының моменті: J1=1,2∙Jқоз=1,2∙0,4= 0,48 кг∙м2. (2.18) Конвейердің механикалық бөлігінің инерциясының қозғалтқыштың жылдамдығына келтірілген моменті: J2=(qж+ 2qл+ qр qр)∙L∙(v/ωқоз )ә= (24,3+2∙14,72+15,71+7,91)∙50∙ ∙(1,4/79,33)2=1,57 кгм2. (2.19) Жүйенің инерциясының қорытынды моменті: J∑=J1+J2= 0,48+1,57=2,05 кгм2. (2.20) |