Во-первых, оценка производительности МК по времени выполнения команд различных систем (RISC и CISC) не совсем корректна. Обычно производительность МП и МК принято оценивать числом операций пересылки «регистр-регистр», которые могут быть выполнены в течение одной секунды. В МК с CISC-процессором время выполнения операции «регистр-регистр» составляет от 1 до 3 циклов, что, казалось бы, уступает производительности МК с RISC-процессором. Однако стремление к сокращению формата команд при сохранении ортогональности системы команд RISC-процессора приводит к вынужденному ограничению числа доступных в одной команде регистров. Так, например, системой команд МК PIC16 предусмотрена возможность пересылки результата операции только в один из двух регистров — регистр-источник операнда f или рабочий регистр W. Таким образом, операция пересылки содержимого одного из доступных регистров в другой (не источник операнда и не рабочий) потребует использования двух команд. Такая необходимость часто возникает при пересылке содержимого одного из регистров общего назначения (РОН) в один из портов МК. В то же время, в системе команд большинства CISC-процессоров присутствуют команды пересылки содержимого РОН в один из портов ввода/вывода. То есть более сложная система команд иногда позволяет реализовать более эффективный способ выполнения операции. Во-вторых, оценка производительности МК по скорости пересылки «регистр-регистр» не учитывает особенностей конкретного реализуемого алгоритма управления. Так, при разработке быстродействующих устройств автоматизированного управления основное внимание следует уделять времени выполнения операций умножения и деления при реализации уравнений различных передаточных функций. А при реализации пульта дистанционного управления бытовой техникой следует оценивать время выполнения логических функций, которые используются при опросе клавиатуры и генерации последовательной кодовой посылки управления. Поэтому в критических ситуациях, требующих высокого быстродействия, следует оценивать производительность на множестве тех операций, которые преимущественно используются в алгоритме управления и имеют ограничения по времени выполнения. В-третьих, необходимо еще учитывать, что указанные в справочных данных на МК частоты синхронизации обычно соответствуют частоте подключаемого кварцевого резонатора, в то время как длительность цикла центрального процессора определяется частотой обмена по ВКМ. Соотношение этих частот индивидуально для каждого МК и должно быть принято в расчет при сравнении производительности различных моделей контроллеров. С точки зрения организации процессов выборки и исполнения команды в современных 8-разрядных МК применяется одна из двух уже упоминавшихся архитектур МПС: фон-неймановская (принстонская) или гарвардская. Основной особенностью фон-неймановской архитектуры является использование общей памяти для хранения программ и данных, как показано на рис. 4.2. 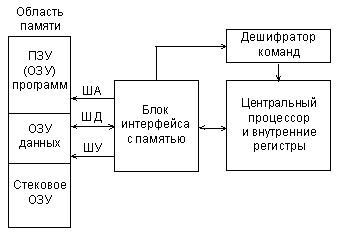
Рис. 4.2. Структура МПС с фон-неймановской архитектурой. Основное преимущество архитектуры Фон-Неймана – упрощение устройства МПС, так как реализуется обращение только к одной общей памяти. Кроме того, использование единой области памяти позволяло оперативно перераспределять ресурсы между областями программ и данных, что существенно повышало гибкость МПС с точки зрения разработчика программного обеспечения. Размещение стека в общей памяти облегчало доступ к его содержимому. Неслучайно поэтому фон-неймановская архитектура стала основной архитектурой универсальных компьютеров, включая персональные компьютеры. Основной особенностью гарвардской архитектуры является использование раздельных адресных пространств для хранения команд и данных, как показано на рис. 4.3. |
 Скачать 1.34 Mb.
Скачать 1.34 Mb.