|
|
КУРС ЛЕКЦИЙ ПО МИКРОПРОЦЕССОРНОЙ ТЕХНИКЕ. Курс лекций по микропроцессорной технике. Введение
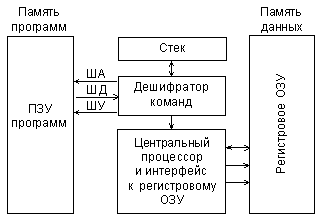
Рис. 4.3. Структура МПС с гарвардской архитектурой. Гарвардская архитектура почти не использовалась до конца 70-х годов, пока производители МК не поняли, что она дает определенные преимущества разработчикам автономных систем управления. Дело в том, что, судя по опыту использования МПС для управления различными объектами, для реализации большинства алгоритмов управления такие преимущества фон-неймановской архитектуры как гибкость и универсальность не имеют большого значения. Анализ реальных программ управления показал, что необходимый объем памяти данных МК, используемый для хранения промежуточных результатов, как правило, на порядок меньше требуемого объема памяти программ. В этих условиях использование единого адресного пространства приводило к увеличению формата команд за счет увеличения числа разрядов для адресации операндов. Применение отдельной небольшой по объему памяти данных способствовало сокращению длины команд и ускорению поиска информации в памяти данных. Кроме того, гарвардская архитектура обеспечивает потенциально более высокую скорость выполнения программы по сравнению с фон-неймановской за счет возможности реализации параллельных операций. Выборка следующей команды может происходить одновременно с выполнением предыдущей, и нет необходимости останавливать процессор на время выборки команды. Этот метод реализации операций позволяет обеспечивать выполнение различных команд за одинаковое число тактов, что дает возможность более просто определить время выполнения циклов и критичных участков программы. Большинство производителей современных 8-разрядных МК используют гарвардскую архитектуру. Однако гарвардская архитектура является недостаточно гибкой для реализации некоторых программных процедур. Поэтому сравнение МК, выполненных по разным архитектурам, следует проводить применительно к конретному приложению. 4.2.2. Система команд процессора МК Так же, как и в любой микропроцессорной системе, набор команд процессора МК включает в себя четыре основные группы команд:
команды пересылки данных;
арифметические команды;
логические команды;
команды переходов.
Для реализации возможности независимого управления разрядами портов (регистров) в большинстве современных МК предусмотрена также группа команд битового управления (булевый или битовый процессор). Наличие команд битового процессора позволяет существенно сократить объем кода управляющих программ и время их выполнения. В ряде МК выделяют также группу команд управления ресурсами контроллера, используемую для настройки режимов работы портов ввода/вывода, управления таймером и т.п. В большинстве современных МК внутренние ресурсы контроллера отображаются на память данных, поэтому для целей управления ресурсами используются команды пересылки данных. Система команд МК по сравнению с системой команд универсального МП имеет, как правило, менее развитые группы арифметических и логических команд, зато более мощные группы команд пересылки данных и управления. Эта особенность связана со сферой применения МК, требующей, прежде всего, контроля окружающей обстановки и формирования управляющих воздействий. 4.2.3. Схема синхронизации МК Схема синхронизации МК обеспечивает формирование сигналов синхронизации, необходимых для выполнения командных циклов центрального процессора, а также обмена информацией по внутренней магистрали. В зависимости от исполнения центрального процессора командный цикл может включать в себя от одного до нескольких (4 — 6) тактов синхронизации. Схема синхронизации формирует также метки времени, необходимые для работы таймеров МК. В состав схемы синхронизации входят делители частоты, которые формируют необходимые последовательности синхросигналов. |
|
|
 Скачать 1.34 Mb.
Скачать 1.34 Mb.