Курс лекций по биомеханике. Курс лекций Содержание Биомеханика как учебная и научная
 Скачать 5.94 Mb. Скачать 5.94 Mb.
|

10.Некоторые данные о конституции человекаКлассификация типов конституции человека основывается на различных принципах: морфологических, функциональных, биохимических, нейрореактивных, гормональных и др. Астенический тип характеризуется высоким ростом, длинной грудной клеткой с острым подгрудинным углом, длинной шеей, узкими наплечьями, относительно длинными конечностями, нежной тонкой и бледной кожей и слабо развитой подкожной клетчаткой. Сердце малых размеров, легкие удлиненные, кишечник короткий, давление крови пониженное, преобладают процессы диссимиляции (рис. 2.21). Гиперстенический тип имеет черты в общем прямо противоположные предыдущему типу, т. е. средний и ниже среднего рост, массивное тело, выраженное жироотложение (склонность к тучности), относительно короткие конечности, короткая грудная клетка, короткая шея, большой живот, относительно большое сердце, длинный кишечник, склонность к повышению артериального давления, преобладают процессы ассимиляции. Нормостенический(атлетический, мускульный) тип обладает относительно пропорциональным гармоничным телосложением, хорошо развитой в большинстве случаев костной и мышечной системами. Считают, что нормостенический тип занимает среднее положение между астеническим и гиперстеническим типами. 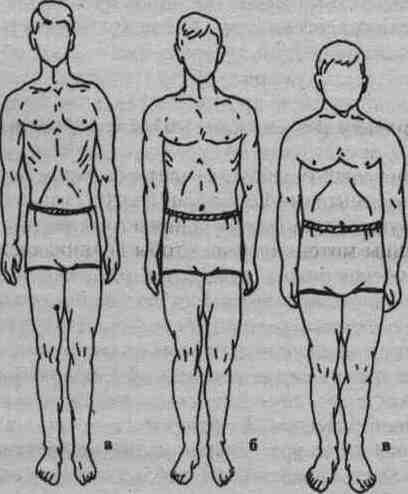 Рис. 2.21. Типы конституции человека: а— астенический; б — нормостенический; в — гиперстенический В настоящее время принято считать, что представители разных типов конституции человека — это группы людей, обладающих комплексом более или менее сходных наследственных и приобретенных в течение индивидуальной жизни признаков (морфологических, физиологических, биохимических, высшей нервной деятельности и др.), обусловливающих особенности жизнедеятельности и реактивности всего организма. 11.Нервная регуляция позы и движенийНервная регуляция работы скелетных мышц осуществляется двигательными центрами ЦНС. Они должны гарантировать строго необходимую степень возбуждения и торможения иннервирующих эти мышцы мотонейронов, чтобы возникающие мышечные сокращения обеспечивали только нужное движение — не больше и не меньше. Однако точное выполнение движений возможно только в случае адекватного исходного положения туловища и конечностей. Нервная регуляция соответствия позы и движения, их правильного сопряжения — одна из важнейших функций двигательных центров. Запрограммированные (автоматические) движения. Организация движений не всегда основана на рефлексах. Например, внешнее дыхание. Такая последовательность движений, поддерживаемая ЦНС без внешней стимуляции, называется «запрограммированной», или автоматической. После того, как была обнаружена способность ЦНС к такой деятельности, быстро получила признание гипотеза, согласно которой движения регулируются в основном программами, а не рефлексами, и представление о «программной организации» ЦНС стало общепринятым. Дыхание, ходьба, чесание — все это примеры врожденных программ, к которым в течение жизни индивида добавляется множество приобретенных. Среди последних есть спортивные или профессиональные навыки (гимнастические движения, печатание и т. п.), становящиеся в результате соответствующей практики почти автоматическими. Целенаправленные функции и функции позы. Другой важный момент состоит в том, что значительная часть нашей мышечной деятельности направлена не на осуществление движений во внешней среде, а на принятие и поддержание позы, положения тела в пространстве. Без контроля позы со стороны двигательной системы, человек беспомощно рухнет на землю, как боксер в нокауте. Кроме того, двигательная система управляет всеми целенаправленными движениями тела во внешнем мире. Они всегда сопровождаются работой и реакциями механизмов позы, идет ли речь о подготовке к движению или о коррекции позы во время или после него. Тесная взаимосвязь между функциями позы и целенаправленными функциями — функциональное свойство двигательной системы. Адаптация двигательной системы к выполнению все более сложных задач происходит постепенно. Филогенетическое развитие происходит путем не столько преобразования уже существующих, сколько формирования добавочных регулирующих механизмов для выполнения новых видов деятельности. Параллельно этому повышается и специализация отдельных двигательных центров. В результате центры регуляции двигательной активности не только составляют элементы иерархической системы, но одновременно действуют как партнеры. В спинном мозге сенсорные афферентные волокна образуют множество связей с мотонейронами, главным образом — через интернейроны. От того, какие связи задействованы, зависит активация или торможение определенных движений. Организм используют нужные программы, не привлекая высшие нервные центры к разработке деталей их выполнения. Высшие двигательные системы включают все супраспинальные центры, участвующие в двигательной регуляции. Функции позы и их координация с целенаправленными движениями контролируются главным образом структурами ствола мозга, а сами целенаправленные движения требуют участия центров еще более высоких уровней. Побуждение к действию и стратегия движения формируются в подкорковых мотивационных областях и ассоциативной коре, затем преобразуются в программы движения, те передаются в спинной мозг, а оттуда к скелетным мышцам для реализации. Сенсорная информация и двигательная активность тесно взаимосвязаны. Для правильного выполнения движений необходимо, чтобы ко всем отвечающим за это структурам в каждый момент времени поступала с периферии информация о положении тела и о ходе реализации составленной программы. Основные характеристики локомоции, т. е. перемещения человека в окружающей среде при помощи координированных движений конечностей, запрограммированы на уровне спинного мозга (R.M. Herman et al. 1976; M.L. Shik, G.N. Orlovsky, 1976). 12.Функциональный анализ положения человека в позе стоя Опорная роль нижних конечностей наиболее велика при различных формах позы стоя. Различают позу стоя (стойку) симметричную, при которой тяжесть тела распределяется равномерно на обе нижние конечности (рис. 2.24), и асимметричную, когда тяжесть тела передается преимущественно или целиком на одну из конечностей. При всех видах — как симметричной, так и асимметричной позы стоя удержание тела в состоянии равновесия возможно только в том случае, когда вертикальная линия, проведенная из центра тяжести тела, проходит в пределах площади опоры. Симметричная поза стоя в зависимости от положения тела имеет три основных вида: стойка нормальная, стойка военная и стойка неряшливая. Нормальная стойка обычно принимается за исходное положение (и. п.) при атропометрических измерениях тела. Это такой вид стойки, при котором общий центр тяжести тела и поперечная ось тазобедренного сустава лежат в одной плоскости, туловище и голова умеренно выпрямлены, угол наклона таза 50—65, пятки вместе, носки разведены под углом 65—70°, перпендикуляр, опущенный из общего центра тяжести, пересекает линию, соединяющую вершины внутренних сводов стоп. При нормальной стойке для уравновешивания тела необходимо небольшое балансирующее напряжение всех мышц, окружающих тазобедренный сустав. Удержание колена в среднем положении определяется некоторым напряжением его связок и тонусом мышцы, натягивающей широкую фасцию (отчасти также сгибатели колена). В голеностопных суставах тяжесть тела уравновешивается главным образом напряжением камбаловидных мышц. Устойчивость равновесия тела при этой стойке может быть увеличена, если расставить ноги во фронтальной плоскости. Стойка военная (положение «смирно») характеризуется тем, что перпендикуляр, опущенный из общего центра тяжести тела, проходит спереди поперечных осей главнейших суставов (тазобедренный, сустав колена, голеностопный) нижних конечностей. При этом виде стойки туловище и голова выпрямлены, поясничный лордоз, а вместе с ним и наклон таза увеличен до 80—90°, живот подтянут, грудная клетка расширена. Положение «вольно» такое же, как и при нормальной стойке. В данном случае для удержания тела в состоянии равновесия, в частности, для предотвращения его падения вперед, необходимо сильное напряжение мышц задней поверхности тела и особенно нижних конечностей, причем наибольшую нагрузку несут ягодичные мышцы. Отмеченная стойка отличается большой неустойчивостью, но более выгодна для непосредственного перехода к движению. При стойке неряшливой(«удобное положение») туловище как бы откинуто назад, а нижние конечности в коленных суставах в большей или меньшей степени переразогнуты, в результате чего перпендикуляр, опущенный из ОЦТ, сдвинут назад. При этом все тело в известной мере расслаблено, грудной кифоз увеличен, а поясничный лордоз, наоборот, уменьшен, таз расположен более горизонтально (наклон около 40°), ребра опущены. Отмеченный вид стойки отличается наибольшим участием в функции удержания тела в равновесии пассивных соединительнотканных элементов. Особенно важна роль при этом подвздошно-бедренных связок, натяжение которых препятствует падению туловища назад. Сустав колена удерживается в разогнутом состоянии главным образом при помощи связок. В голеностопных суставах сохраняется равновесие за счет незначительного сокращения камбаловидных мышц. Неряшливая стойка обеспечивает наиболее устойчивое равновесие, которое может быть увеличенным, если расставить ноги на ширину плеч. К неблагоприятному влиянию этого вида стойки следует отнести уменьшенную глубину вдоха и давление органов малого таза на мышцы тазового дна. От различных видов положения стоя следует отличать осанку тела, под которой понимается не вынужденное или сознательное взаиморасположение звеньев, а привычное держание тела, обусловленное индивидуальными особенностями человека (рис.25). Выделяют следующие виды осанки: нормальная, сутуловатая, лордотическая, кифотическая, выпрямленная (плоская), сколиозная Осанка зависит от формы позвоночника, равномерности развития и тонуса мускулатуры торса, вида деятельности, возраста и других факторов. 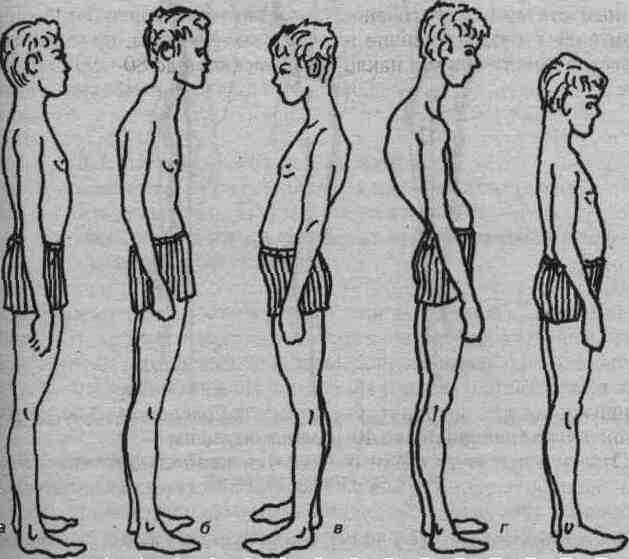 Рис. 25. Виды осанки: а — нормальная; б — сутуловатая; в — лордотическая; г — кифотическая; д — выпрямленная (плоская) Напряжение (тонус) мышц в спокойном состоянии невелико. Момент силы тяжести головы способствует ее наклону вперед, этому противодействует напряжение мышц, вызывающих наклон головы назад и разгибание шеи. Противодействие силе тяжести, стремящейся произвести сгибание позвоночного столба, оказывают мышцы, разгибающие его. Наклон таза назад препятствует натяжению подвздошно-бедренных и лобково-бедренных связок. Кроме пассивных сил в обеспечении равновесия тела принимают участие также мышцы нижних конечностей: сгибатели бедра, разгибатели голени и сгибатели стопы. При функциональном нарушении осанки и сколиозе выявляется мышечный дисбаланс. Тема 4. ТЕЛО ЧЕЛОВЕКА КАК БИОМЕХАНИЧЕСКАЯ СИСТЕМА 1. Механические свойства звеньев и их соединений 2. Соединения звеньев 3. Звенья как рычаги 4.Биомеханические свойства мышц 5. Механическое действие мышц 6.Групповые взаимодействия мышц Строение и функции органов опоры и движения отличаются у человека большой сложностью. Этим обусловлено чрезвычайное многообразие возможностей положений и движений тела. Особенности тела человека, в частности двигательного аппарата, дают основание рассматривать тело в целом и его части как особые биомеханические системы. Под биомеханическими системами понимается объединение живых объектов (например, органов, тканей), обладающих общими особенностями в проявлении законов механического движения, а также общими особенностями способов управления ими, участия в этих движениях или в их использовании. Различают системы активные (всего тела, двигательного аппарата) и пассивные (внутренних органов, мягких и жидких тканей). Особый интерес для изучения движений человека представляет биомеханическая система его двигательного аппарата, которая служит: а) источником энергии, б) механизмом для передачи усилий, в) объектом движения и г) системой управления. 1. МЕХАНИЧЕСКИЕ СВОЙСТВА ЗВЕНЬЕВ И ИХ СОЕДИНЕНИЙ С позиций теории механизмов и машин1 части тела человека, имеющие подвижные соединения, принято рассматривать как звенья, составляющие биокинематические пары и цепи. Звенья цепей и их соединения находятся под действием приложенных к ним сил (нагрузок). В этих условиях проявляются особенности строения и функции (механические свойства) тела человека, влияющие на выполнение движений. 1.1. Виды нагрузок и характер их действия Силы, приложенные к телу и в совокупности вызывающиеегодеформации2, называются нагрузками. (Деформация — изменение формы и размеров.) К основным видам деформаций относятся: растяжение, сжатие, изгиб, кручение и сдвиг (рис. 2). Кости скелета и мягкие ткани при деформации под действием приложенных сил (нагрузок) противодействуют им. 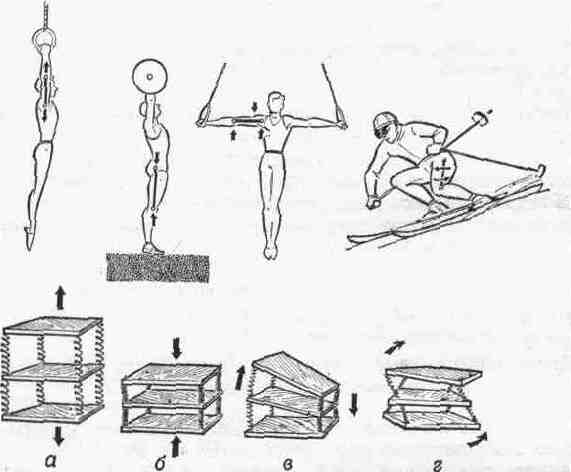 Рис. 2. Нагрузки, вызывающие деформацию: а — растяжение; б — сжатие; в — изгиб; г — кручение (ориг.). На схемах внизу — смещение элементов (по С. Э. Хайкипу) Нагрузки, обусловливающие растяжение,—это самые характерные нагрузки для мягких тканей. Они возникают, например, при висах (см. рис. 2, а) или во время удержания груза в опущенных руках. Нагрузки, создающие сжатие костей и хрящей, встречаются чаще всего при вертикальном положении тела на опоре. В этом случае на скелет действуют, с одной стороны, силы тяжести тела и вес внешних отягощений, а с другой —давление опоры (см. рис. 2, б). Нагрузки, вызывающие изгиб, обычно встречаются, когда кости выполняют роль рычагов. В этих случаях приложенные к ним силы мышц и силы сопротивления направлены поперек костей и вызывают изгиб (см. рис. 2, в). Наконец, нагрузки, обусловливающие кручение, чаще всего встречаются при вращательных движениях звена вокруг продольной оси (см. рис. 2, г). По характеру действия различают нагрузки статические и динамические. Первые обычно постоянны по величине и, как правило, относительно невелики. Вторые возникают при движениях1, когда приложены силы инерции; они изменяются и могут нарастать до очень больших величин (например, нагрузки на сжатие после падения с большой высоты, нагрузки на изгиб при ударе). Такие динамические нагрузки, особенно действующие не в обычном направлении (например, при ударе поперек кости), могут превысить запас прочности того или иного звена, тогда произойдет повреждение двигательного аппарата. Мышцы, суставные сумки, связки, а также хрящи, соединяющие кости скелета, деформируясь, уменьшают действие динамических нагрузок. Особенно большую роль в смягчении этого действия играют благодаря своей упругости мышцы. Если они недостаточно амортизируют нагрузку, то повреждаются связки и хрящи, а иногда даже и кости и сами мышцы. Кости, как твердые тела, при передаче сил выполняют роль рычагов. В биомеханике рассматривают в качестве твердых рычагов многие части тела (плечо, бедро и т. д.); считается, что они не изменяют своей длины, не сгибаются и не скручиваются. 1.2. Упругие деформации Упругие деформации возникают в теле под действием нагрузки и исчезают при ее снятии. Изменение формы (деформация) тел под действием приложенных к ним сил — свойство всех реальных тел2. Абсолютно твердых тел, которые не деформируются ни при каких условиях, в природе не существует. В случае упругой деформации форма тела после прекращения действия деформирующей силы восстанавливается (например, стальная пружина) в отличие от пластической деформации, которая остается после снятия нагрузки, т. е. прежняя форма уже не восстанавливается (например, сырая глина). Таким образом,упругость — свойство тела самостоятельно восстанавливать после деформации свою форму. Упругая сила (сила упругого напряжения), противодействуя изменению формы, нарастает и, в конце концов, прекращает деформацию как останавливающая сила — в этот момент она становится равной деформирующей нагрузке. Эта же упругая сила при снятии деформирующей нагрузки восстанавливает прежнюю форму тела как восстанавливающая сила. Напряжение деформированного тела измеряется в килограммах на квадратный сантиметр его сечения3. Рассмотрим зависимость между деформацией тела и напряжением (на примере мягкой стали). Можно выделить 4 основных варианта: зона линейной упругости — напряжение прямо пропорционально деформации (идеальная пружина). После разгрузки деформация полностью исчезает; зона нелинейной упругости — на равные приращения деформации приходятся все меньшие (как у мягкой стали) или все большие (как у мышцы) приращения напряжения; после разгрузки форма тела полностью восстанавливается; зона пластической деформации — с увеличением деформации напряжение нарастает; после разгрузки форма тела восстанавливается не полностью (остаточная деформация); зона разрушения — тело начинает разрушаться. Зоны деформации различны у разных тел. Несколько упрощая, можно сказать, что у каждого тела в определенных условиях одна из зон больше других. Поэтому принято называть тело в зависимости от преобладающей зоны деформации линейно упругим, нелинейно упругим, пластическим или хрупким1. Как было сказано выше, после упругой деформации происходит полное восстановление формы (линия ЛО); после пластической может произойти некоторое ее восстановление (линия БВ), но будет еще остаточная деформация (05). В пределах малых деформаций упругих тел напряжение пропорционально деформации. Это выражено в законе Гука: =Е (линейная упругость) — «растяжение нагруженного тела прямо пропорционально нагрузке». Коэффициент Е (коэффициент пропорциональности) называется модулем Юнга (продольной упругости). Он показывает, насколько изменяется напряжение при деформации данного тела, как тело сопротивляется деформации. Тела, для малых деформаций которых необходимы большие нагрузки, вызывающие большие напряжения, называются жесткими. Например, для чугуна модуль Юнга равен 900 000 кГ/см3; для кожаного ремня — 2000 кГ/см3; для мышцы — от 10 до 120 кГ/см2 и более. Считают, что модуль мышцы может изменяться более чем в 100 раз (приближенные данные). Мышцы как упругие тела обладают нелинейной упругостью и непременной жесткостью. |