Курс лекций по биомеханике. Курс лекций Содержание Биомеханика как учебная и научная
 Скачать 5.94 Mb. Скачать 5.94 Mb.
|

Внешние относительно системы силы — мера воздействия на нееобъектов окружающей среды. Внешние силы обладают особенностями, значение которых важно для понимания динамики. Они могут быть мысленно приложены к центру тяжести системы как изменяющие его движение, могут изменять и ее кинетический момент, что невозможно для внутренних сил. В этом главный смысл разделения сил на эти группы (внешние и внутренние силы). В числе внешних для тела человека сил будут рассмотрены: дистантные силы (тяжести) и контактные (силы веса и инерции внешних тел, сопротивления среды, реакции опоры, трения и упругой деформации). 3.1. Сила тяжести и вес Сила тяжести тела — это мера притяжения тела к Земле с учетом уменьшения силы притяжения вследствие суточного вращения Земли. Сила тяжести тела равна геометрической (векторной) сумме гравитационной и инерционной (центробежной) сил и приложена как равнодействующая всех сил тяжести частиц тела к его центру тяжести. Все тела на Земле находятся в поле земного тяготения. Тело массы т притягивается Землей массы М с силою F по линии, соединяющей их центры масс. Сила тяготения зависит только от масс и расстояния .Для определения величины силы тяжести применяется статическое измерение — по действию тела на площадку пружинных весов. Под действием силы тяжести тело само оказывает давление на опору (нижнюю или верхнюю) — проявляется вес тела. Вес тела (статический) — это мера его воздействия в покое на покоящуюся же связь (опору, подвес), как на препятствие, мешающее падению. Рычажные весы с гирями не улавливают различие в весе, связанное с местоположением пункта взвешивания, поскольку вес гирь изменяется так же, как вес тела. Вес тела равен его силе тяжести, но вес сила контактная, приложенная не к телу, а к опоре тела, сила же тяжести—дистантная сила, которая приложена к самому телу. Для определения величины силы применяется также динамическое измерение — по ускорению свободно падающего тела (для технических расчетов принимают 981 см/сек), В разных пунктах Земли это ускорение различно, но в некоторых практических задачах это различие можно не учитывать. Для приближенных расчетов (в учебных заданиях) его считают равным 9,8 или даже 10,0 м/сек. Сила тяжести тела человека и вес удерживаемых им тел вызваны земным тяготением и поэтому служат для человека внешними силами. Поскольку вес (как и сила тяжести) изменяется от ускорения тела, различают статический вес (тело покоится) и динамический вес.Последний есть геометрическая сумма статического веса и силы инерции при ускорении по вертикали. Например, при приседании или отталкивании силы инерции направлены против ускорения. Они или увеличивают или уменьшают динамический вес тела (его общую силу давления на опору). На горизонтальной плоскости сила тяжести (G) вызывает опорную реакцию (R); обе силы взаимно уравновешены. На наклонной плоскости составляющие силы тяжести соответственно вызывают опорную реакцию RNи силу трения Т. Вне опоры сила тяжести вызывает у всех звеньев свободно падающего тела одинаковое ускорение, поэтому на взаимное расположение и относительное движение частей тела сила тяжести в полете не влияет. Поскольку тело не действует на опору, то нет веса — тело находится в состоянии невесомости. Итак, сила тяжести тела действует: а) на опору в покое — как статический вес; б) на опору пpи вертикальном ускорении—как динамический вес и в) вне опоры — как причина ускорения свободно падающего тела. В положении на опоре силы тяжести либо проходят через оси суставов тела и тянут части тела вниз, либо действуют на плече силы тяжести (d) и обладают моментом относительно оси сустава — ai(,(g). Так же действуют на тело человека своим весом и внешние тела, удерживаемые или приводимые в движение человеком. Стало быть, при опоре вес звеньев тела и отягощений всегда влияет на расположение и движение звеньев тела. Изменять статический вес внешних тел и своих частей тела человек не может, но и з м е н я т ь моменты сил тяжести, а также динамический вес можно и иногда нужно — в зависимости от задачи движения и конкретных условий. 3.2. Силы инерции внешних тел Сила инерции внешнего тела в инерциальной системе отсчета (реальная сила) — это мера действия на тело человека со стороны тела, ускоряемого им. Она равна произведению массы внешнего тела на его ускорение, направлена в сторону, противоположную ускорению, и приложена к рабочей точке тела человека (место его контакта с ускоряемым телом или опорой). При движениях человек, изменяя скорость внешних тел, сообщает им ускорение. Как противодействие ускоряющей силе действия человека возникает внешняя сила инерции ускоряемых тел. Сила инерции внешнего тела, действующая на тело человека,— это реакция, испытываемая телом человека со стороны ускоряемого тела, которому он, и только он, сообщает ускорение. При толкании штанги возникает ее ускорение от груди и рук (а), направленное вверх (рис. 30, а). Сила инерции штанги, приложенная к груди и рукам, обусловлена ускоряющей силой F^, равна ей по величине и направлена противоположно (вниз); она складывается с весом штанги. Если атлет замедляет движение штанги, направленное вниз (опуская ее на помост), то ускорение штанги также направлено вверх. Сила же инерции штанги, как и ее вес, направлена вниз и приложена к рукам атлета (см. рис. 30,6). Силы инерции как внешние силы проявляются также при замедлении человеком движения внешних тел, т. е. при их торможении. Примером проявления сил инерции может быть, в частности, действие внешних материальных объектов, в том числе жидкостей, газов— удар волны, порыв ветра. Все это — примеры реальной (ньютоновой) силы инерции, отсчитываемой в инерциалыюй системе отсчета и приложенной к ускоряющему телу со стороны ускоряемого в поступательном движении. При искривлении траектории внешнего тела силой человека во вращательном движении центробежная сила, как сила инерции вращаемого тела (равная по модулю центростремительной тяге спортсмена), направлена по радиусу от центра и приложена к рабочей точке тела человека (см. рис. 30, в). 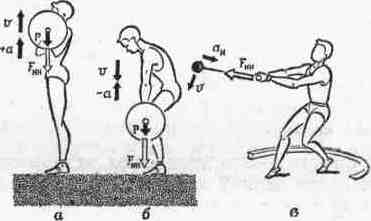 Рис. 30. Сила инерции: а, б, в — реальная при ускорениях: а — положительном, б — отрицательном,. в — нормальном, Во вращательном движении полная сила инерции тела составляется из тангенциальной составляющей при угловом ускорении) и нормальной — при центростремительном ускорении). 3.3.Силы сопротивления среды Давление в газе или жидкости — это мера силы механического воздействия между элементами данной среды и элементами среды и другими телами. Оно равняется отношению силы к той площади, через которую осуществляется воздействие. Для всякой площадки в среде направление силы действия одного элемента среды на другой только нормальное (перпендикулярное площадке). В каждой точке среды величина давления одинакова для всех направлений, к которым это давление отнесено. Давление во всех точках среды, лежащих в одной горизонтальной плоскости, одно и то же. Давления по вертикали (в случае покоя среды) распределяются так, что разность давлений (F2—F1) равна весу вертикального столба среды (G). 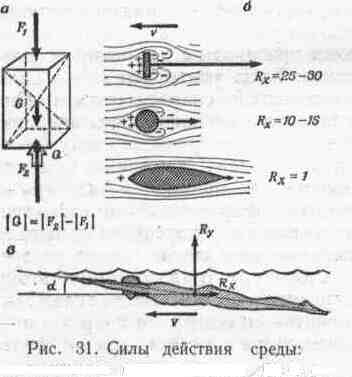 a—статическая (выталкивающая. Q); б, в— динамические; б-лобового сопротивления, в - подъемная (Ry) (ориг.) Человек всегда находится и передвигается в какой-либо среде—либо воздушной, либо водной. Он вступает в механическое взаимодействие со средой. 'Силы ее действия могут проявляться статически (аэро-и гидростатика), например выталкивающая сила (по закону Архимеда), или динамически (аэро- и гидродинамика), например подъемная сила в потоке воздуха или воды. Выталкивающая сила — это мера действия среды на погруженное в нее тело. Выталкивающая сила равна геометрической (векторной) сумме сил, действующих на все элементы поверхности тела; она всегда равна по модулю весу вытесненного объема жидкости или газа и направлена вверх. Если тело весит больше, чем вытесненная им вода, то оно будет тонуть; при обратном соотношении будет всплывать. Когда тело движется в среде, возникают дополнительные силы, зависящие в основном от величины его скорости относительно среды (относительной скорости), формы тела, его ориентации по направлению относительного движения и свойств среды. Движение тела в среде (или среды относительно тела) характеризуется линиями тока. Это линии, в каждой точке которых скорость частиц среды касательна. Скорости касательны и к линиям тока, и к траекториям частиц. Но линии тока характеризуют направления скорости разных частиц в данный момент времени, а траектории — направления скорости одних и тех же частиц в различные моменты времени. Только при постоянном распределении скоростей линии тока и траектории частиц совпадают. Тело полностью обтекаемо, если линии тока расположены одинаково сверху и снизу тела, а также спереди и сзади. Правда, давление на тело с разных сторон различно. По закону Бернулли, где скорость потока возрастает, давление уменьшается, и наоборот. Именно этим и объясняются изменения давлений (дополнительные силы). Но это объяснение достаточно только для идеальной среды, в которой отсутствует внутреннее трение (вязкость). Вследствие вязкости обтекание всегда неполное, и поэтому возникает лобовое сопротивление. Лобовое сопротивление — это сила, с которой среда препятствует относительному движению в ней тела. Лобовое сопротивление при относительно небольших скоростях приближенно равно произведению площади поперечного сечения тела, коэффициента лобового сопротивления, плотности среды и квадрата относительной скорости:Rx=SCxv2, где S — площадь поперечного сечения (миделево сечение, или мидель1), равная площади проекции тела на плоскость, перпендикулярную потоку; Сx — коэффициент лобового сопротивления, который зависит от формы тела (обтекаемости) и его ориентации относительно потока; — плотность среды (воды — 1000 кг/м3, воздуха — 1,3 кг/м3; разница в плотности этих сред—почти в 780 раз); v—относительная скорость потока и тела. Перед телом давление повышено, так как скорость тока снижена (поджатие). Сзади тела силы трения вызывают отрыв потока от стенок тела, возникают завихрения, создается зона пониженного давления (разрежение). Равнодействующая сил давления на тело спереди и сзади направлена назад и тормозит движение тела. Тело с более обтекаемой формой имеет меньше завихрений сзади. Поэтому сопротивление среды может в зависимости от формы тела снизиться при прочих равных условиях в десятки раз (см. рис. 31, б). Таким образом, лобовое сопротивление зависит от разности давлений спереди и сзади тела в потоке (сопротивление формы) и трения между телом и пограничным слоем среды (сопротивление трения). Когда поверхность тела образует угол с направлением потока (угол атаки а), возникает еще подъемная сила (R„, см. рис. 31, в). При этом давление снизу тела несколько больше давления в потоке, а давление сверху тела намного меньше; тело не столько подпирается снизу, сколько «подсасывается» кверху. Подъемная сила — это сила, действующая со стороны среды на тело, расположенное под углом к потоку. Подъемная сила зависит от тех же факторов, что и лобовое давление: Ry=SCyv2, где Су — коэффициент подъемной силы. Подъемная сила увеличивается в известных пределах с увеличением угла атаки, а потом начинает падать. Равнодействующая лобового давления и подъемной силы (она же равнодействующая сил давления и трения) при движении в воздухе называется полной аэродинамической силой. Лобовое сопротивление среды тормозит продвижение вперед, например, при полете, плавании, скольжении, беге. Подъемная сила поддерживает тело, например тело прыгуна на лыжах с трамплина в полете, пловца в воде при продвижении его по дистанции. 3.4. Реакции опоры Реакции опоры — это мера противодействия опоры при давлении на нее со стороны покоящегося или движущегося при контакте с ней тела. Реакция опоры равна по величине силе, с которой тело действует на опору, направлена в противоположную этой силе сторону и приложена к телу в той точке, через которую проходит линия силы, действующей на опору. Нормальная (или идеальная) реакция опоры при действии веса тела на горизонтальную поверхность направлена вертикально вверх. Во всех случаях она перпендикулярна плоскости, касательной той поверхности, которая служит опорой в точке приложения силы. Человек может оказывать действие на опору не только по нормали к ней, но и под острым углом. Тогда направление полной реакции опоры не совпадает с нормалью. Горизонтальная составляющая полной реакции опоры называется силой трения, если поверхности, соприкасающиеся при опоре, ровные (без выступов).  Рис. 32. Силы опорной реакции: 1, 6 — статические; 2, 4 — уменьшенные; 3, 5 — увеличенные (ориг.) Человек, находящийся на опоре (нижней или верхней), действует на нее статическим весом. В этом случае реакция опоры статическая и равна весу тела (рис. 32). При движении с ускорением частей тела человека, опирающегося на опору, возникает сила инерции тела человека, которая геометрически суммируется с его весом. Увеличенную или уменьшенную опорную реакцию обычно называют динамической. Но правильнее говорить здесь о добавлении к статической еще и динамической составляющей опорной реакции, вызванной теми усилиями, которые определяют ускорение тела. Линия действия силы опорной реакции при неподвижном положении тела на опоре или же под опорой проходит через ОЦТ тела человека. Однако при движениях человека линия действия как нормальной, так и полной опорной реакции (равнодействующая нормальной реакции и силы трения по всем направлениям) почти никогда не проходит через ОЦТ. Для анализа действия сил на наклонной плоскости опорная реакция может быть разложена на нормальную составляющую (перпендикулярную плоскости) и касательную составляющую (параллельную плоскости). Первая противодействует нормальной составляющей силы тяжести, вторая (сила трения) — силе, вызывающей скольжение тела. 3.5. Силы трения Сила трения — это мера противодействия движению, направленному по касательной к поверхности прикасающегося тела. Величина силы трения (как составляющей реакции поверхности связи) зависит от воздействия движущегося или смещаемого тела; она направлена против скорости или смещающей силы и приложена в месте соприкосновения. Силы трения (касательные реакции) возникают между соприкасающимися телами во время их движения друг относительно друга (рис. 33) 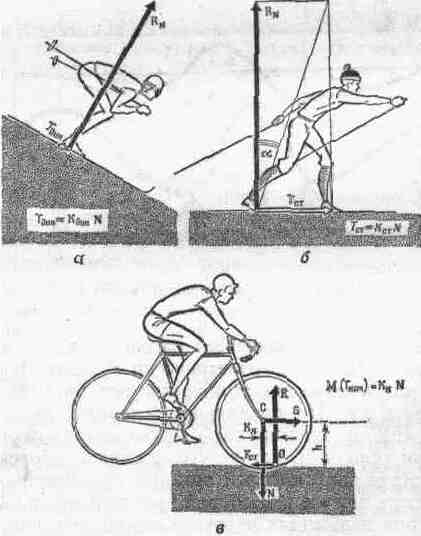 Рис. 33. Силы трения (Т): a-скольжения динамическая; б — скольжения статическая; в — момент трения качения (ориг.) Различают три вида трения: трение скольжения, качения и верчения. При скольжении движущееся тело соприкасается с неподвижным одной и той же частью своей поверхности (лыжа скользит по снегу). При качении точки движущегося тела соприкасаются с другим телом поочередно (колесо велосипеда катится по треку). Верчение характеризуется движением на месте вокруг оси (волчок). Сила трения скольжения динамическая (движения) проявляется при движении тела, приложена к скользящему телу и направлена в сторону, противоположную относительной скорости его движения. Динамическая сила трения скольжения не зависит от величины движущей силы и приближенно пропорциональна динамическому коэффициенту трения скольжения (kдин) и силе нормального давления на опору(N): Tдин=kдинN Когда поверхности полностью разделены слоем смазки, то проявляется жидкостное трение1 Оно существует между слоями жидкости, а также между жидкостью и твердым телом. В противоположность сухому трению (между твердыми телами без смазки), жидкостное трение проявляется только тогда, когда есть скорость. С остановкой движущихся тел жидкостное трение исчезает, поэтому даже самая малая сила может сообщить скорость слоям жидкой среды, например при движении твердого тела в воде. Иная картина при сухом трении. Если приложить движущую силу к покоящемуся телу, то она сможет сдвинуть тело с места лишь тогда, когда станет больше силы трения покоя, препятствующей движению. Таким образом, сухое трение и жидкостное принципиально различны. Сила трения скольжения статическая (покоя) проявляется в покое, приложена к сдвигаемому телу, направлена в сторону, противоположную сдвигающей силе. Статическая сила трения скольжения равна сдвигающей силе, но не может быть больше предельной2; последняя пропорциональна статическому коэффициенту трения скольжения (kст) и силе нормального давления (N): Тст=kстN Стало быть, статическая сила трения покоя может иметь величину от нулевой до предельной (неполная и полная). Минимальная сдвигающая сила, приводящая тело в движение, больше предельной силы трения покоя. Отношение между величиной нормальной опорной реакции (равной силе нормального давления) и предельной силой трения покоя равно тангенсу угла (а), который называется углом трения (или углом сцепления) (см. рис. 33, б). Тангенс угла сцепления равен коэффициенту трения покоя. Фактический угол силы давления на опору в покое не может быть больше, чем угол трения. Это значит, что, пока линия действия силы, приложенной к телу, проходит внутри угла трения, тело не может быть сдвинуто с места. Лишь когда линия действия силы окажется за пределами угла трения, тело будет сдвинуто. На горизонтальной поверхности сила нормального давления обычно представлена статическим или динамическим весом (человек неподвижен или отталкивается от опоры). Но могут быть и другие источники нормального давления, например при давлении, оказываемом ногами и спиной альпиниста на стенки камина (вертикальной расщелины в скалах), 3.6. Силы упругой деформации Сила упругой деформации — это мера действия деформированного тела на другие тела, с которыми оно соприкасается. Величина и направление упругих сил зависят от упругих свойств деформированного тела, а также от вида (сжатие, растяжение и др.) и величины деформации. Все реальные твердые тела, а также жидкости и газы в той или иной степени деформируются под действием приложенных сил, при этом в них возникают силы упругой деформации (или упругие силы). В так называемых упругих телах относительно невелик модуль Юнга. Деформации значительны, так как даже малые силы вызывают относительно большие деформации. После прекращения деформирующего воздействия упругие силы восстанавливают форму тела. К таким телам, действующим на тело человека, можно отнести батут, пружинящий трамплин, эспандер. При деформации они поглощают работу (увеличивается их потенциальная энергия), а затем, восстанавливая свою форму, совершают работу (уменьшается потенциальная энергия). Эспандер (резиновый или пружинный) поглощает работу, совершаемую спортсменом. При использовании же батута и мостика существенна работа, которую совершают эти снаряды, восстанавливая свою форму. Упругие взаимодействия имеют место при деформации тел, связанных с опорой под действием сил тяготения (проявление веса); при деформации опоры (опорные реакции), ускоряемых тел (силы инерции), отчасти среды (силы сопротивления среды), соприкасающихся поверхностей (силы трения). Выделение сил упругой деформации в отдельную группу как внешних относительно человека сил целесообразно только в случаях значительных деформаций внешних упругих тел. 4. ВНУТРЕННИЕ ОТНОСИТЕЛЬНО СИСТЕМЫ СИЛЫ При биомеханическом исследовании движений человека рассматриваются обычно внутренние относительно его тела силы. Они возникают при взаимодействии частей биомеханической системы тела. Внутренние силы механической системы — мера взаимодействия входящих в нее тел. Внутренние силы нельзя мысленно рассматривать как приложенные к центру тяжести системы. Они не могут сами по себе изменять движение ОЦТ системы и ее кинетический момент. Внутренние силы осуществляют притягивание и отталкивание внутри системы, между ее частями. В абсолютно твердом теле они попарно взаимно уравновешиваются. В системе внутренние силы попарно не уравновешиваются, если приложены к разным частям системы (телам),— каждая производит свое действие. К внутренним для тела человека силам относятся силы мышечной тяги и силы пассивного противодействия органов и тканей. 4.1. Силы мышечной тяги Силы мышечной тяги приложены к звеньям кинематических цепей внутри тела. Мышцы в своей активности всегда объединены в группы. Силы тяги каждой мышцы изменяются. Поэтому изменяются и тяги отдельной группы мышц и тяги взаимодействующих групп мышц. Мышцы могут по ходу движения включаться в работу, выключаться из нее, а также, изменяя функцию, переходить из одной группы в другую. Совместное действие мышц обеспечивает сохранение и направленное изменение взаимного расположения звеньев. Работа мышц — основной источник энергии движений человека (энергетическая функция). Мышцы, изменяя положение частей тела, обусловливают его воздействие на опору, среду и внешние тела. Посредством мышечных тяг человек управляет движениями, используя внешние силы и остальные внутренние силы (управляющая функция). 4.2. Силы пассивного противодействия Силы пассивного противодействия включают: опорные реакции в суставах и местах прикрепления мышц и связок, силы сухого и жидкостного трения, силы инерции при ускорениях звеньев, органов и тканей, а также упругие силы деформации упругих образований. При передаче сил по кинематическим цепям в виде сил давления костей друг на друга в суставах (вследствие воздействия веса частей тела и внешних тел, а также приложенных к костям тяг мышц и связок) возникают опорные реакции. Взаимное смещение органов и тканей при соприкосновении вызывает силы трения. К ним относятся и трение со смазкой (типа граничного и полусухого) и жидкостное трение как в жидких тканях и в прослойках между органами, так и в мягких тканях при их деформации (вязкость). Вследствие деформаций тела человека возникают также упругие силы в пассивной части двигательного аппарата. Речь идет в первую очередь об упругих силах в связочном аппарате крупных суставов и соединений таких кинематических цепей, как позвоночник. Все внутренние силы часто называют в отличие от внешних усилиями. В биомеханике усилиями именуют только силы мышечной тяги. 5.Динамические особенности в движениях человека 5.1. Роль сил в движениях человека В классической механике изучается действие механических сил независимо от их источников, их происхождения. В биомеханике же существенно именно то, каковы источники сил и, следовательно, какова «цена» используемой силы для организма человека. Все силы, приложенные к двигательному аппарату человека, в биомеханике принято рассматривать в качестве так называемого силового поля. Различают внешнее силовое поле как совокупность всех внешних для человека сил и внутреннее — как совокупность внутренних сил. Внешнее силовое поле проявляется как силы сопротивления. Их работа отрицательная; для ее преодоления затрачивается энергия движения и напряжения мышц человека. Различают рабочие и вредные сопротивления. Преодоление рабочих сопротивлений составляет главную задачу движений человека (например, в преодолении веса штанги и заключается цель движений со штангой). Вредные сопротивления поглощают полезную работу; они в принципе неустранимы (например, силы трения лыж по снегу). Внешние силы используются человеком в его движениях и как движущие. Для совершения необходимой работы, для преодоления человеком сил сопротивления могут использоваться вес, упругие силы, инерционные и др. Внешние силы являются в этом случае «даровыми» источниками энергии, поскольку человек расходует меньше внутренних запасов энергии мышц. Человек преодолевает силы сопротивления мышечными силами и соответствующими внешними и совершает как бы две части работы: а) работу, направленную на преодоление всех сопротивлений (л рабочих и вредных), и б) работу, направленную на сообщение ускорений своим органам движения и перемещаемым внешним объектам. В биомеханике сила действия человека — это сила воздействия на внешнее физическое окружение, передаваемого через рабочие точки тела человека. Рабочие точки, соприкасаясь с внешними телами, передают движение (количество движения, а также кинетический момент) и кинетическую энергию (поступательного и вращательного движения) внешним телам. Сила действия человека может быть статической, если она уравновешена внешними силами, и динамической, если она вызывает соответствующие ускорения (положительные, отрицательные, тангенциальные, нормальные). Задача движений, относящихся к спортивной технике, в самом общем виде заключается в уменьшении действия вредных сопротивлений и увеличении эффективности силы действия человека с наилучшим использованием движущих сил — активных мышечных тяг и особенно сил, имеющих иные источники. К числу тормозящих сил, входящих в сопротивления, относятся все внешние и внутренние силы, в том числе и мышечные. Какие из сил будут играть роль вредных сопротивлений, зависит от условий конкретного упражнения. Только реактивные силы — силы опорной реакции и трения — не могут быть движущими силами: они всегда остаются сопротивлениями — как вредными, так и рабочими. Эффективность приложения сил в механике определяют по коэффиценту полезного действия (к. п. д.): отношению работы по преодолению рабочих сопротивлений к работе движущих сил. Чем больше к. п. д., тем эффективнее движение. При энергетических расчетах для оценки роли силы определяют мощность силы, характеризующую важную сторону ее эффекта — быстроту выполнения работы. Мощность силы — это мера быстроты приращения работы силы. Мощность силы определяется как отношение выполненной работы к затраченному на эту работу времени: N=A/t, где N — мощность; F — сила, совершающая работу; s — элементарный путь; t— время, затраченное на преодоление пути s .Внутреннее силовое поле включает и движущие силы и сопротивления (как рабочие, так и вредные). В движениях человека движущие силы имеются не всегда (их может не быть в движениях по инерции), а тормозящие — всегда. В связи с тем что все движения в суставах характеризуются криволинейными траекториями, во всех случаях приложены отклоняющие (центростремительные) силы. От соотношения всех названных сил зависят ускорения звеньев. Как уже указывалось, движений человека без ускорений в принципе не бывает. Следовательно, во всех движениях возникают силы инерции, направление которых противоположно направлению ускорений. Силы инерции внешних тел относятся к внешним силам; силы инерции, вызываемые взаимодействием частей тела человека,— к внутренним. Чрезвычайное обилие сил инерции (реальных — ньютоновых) очень усложняет управление движениями и, конечно, их анализ. При рассмотрении составного движения кинематических цепей необходимо учитывать также многочисленные переносные и поворотные силы инерции, возникающие в кинематических цепях. Следует постоянно помнить о вращательном характере движений: момент даже постоянной силы с изменением угла ее приложения изменяется. 5.2. Совместное действие сил Внешние и внутренние относительно тела человека силы действуют на него совместно. Все эти силы независимо от их источника действуют как механические силы, изменяя механическое движение. В этом смысле они находятся в единстве, как материальные силы: можно производить при соблюдении соответствующих условий их сложение, разложение, приведение и другие операции. Внешние силы, действуя на тело человека, вызывают появление и изменение соответствующих внутренних сил. Это механические силы противодействия, в число которых входят обусловленные биологическими факторами силы мышечной тяги. Посредством внутренних сил мышечной тяги человек может вызывать своим действием появление и изменение внешних сил, управляя в известных пределах их воздействием на самого себя. Силы мышечной тяги — единственные внутренние источники энергии человека. Только посредством этих сил человек может использовать все остальные силы и управлять движениями. Движения человека представляют собой результат совместного действия внешних и внутренних сил. Внешние силы, как выражающие воздействие внешней среды, обусловливают многие особенности движений. Внутренние силы, как единственные непосредственно управляемые человеком, обеспечивают правильное выполнение заданных движений. По мере совершенствования движений становится возможным лучше использовать мышечные силы. Техническое мастерство проявляется в повышении удельного веса внешних и пассивных внутренних сил как движущих сил. При необходимости обеспечивается не только экономность (сбережение сил), экономичность (высокий к. п. д. мышечных сил), но и высокий максимум мышечных сил и значительная быстрота достижения этого максимума при движении. Тема 7.БИОДИНАМИКА ДВИГАТЕЛЬНЫХ КАЧЕСТВ 1.Биологические и физиологические механизмы развития двигательных качеств 2.Характеристика двигательных (локомоторных) качеств 3.Силовые качества 4.Развитие силы и ее измерение 5.Методика развития (тренировка) силы мышц 6.Влияние различных факторов на проявление силы мышц. 7.Физическая работоспособность. 8.Развитие быстроты. 9.Развитие ловкости. 10.Развитие выносливости. 11.Развитие гибкости. 1.Биологические и физиологические механизмы развития двигательных качеств Каждый человек владеет определенными двигательными навыками, например, может поднять определенный вес, пробежать или прыгнуть и т. п., но возможности у всех различны. Это связано и с возрастом, и наследственностью и, главное, с тренированностью. Двигательные качества отличаются друг от друга по форме и по затраченной энергии. Двигательные качества — это функциональные свойства организма, определяющие его двигательные способности. Они проявляются в одинаковой форме движений и энергетического обеспечения и имеют аналогичные физиологические механизмы. Поэтому методики совершенствования (тренировки) тех или иных качеств имеют общие черты независимо от конкретного вида движения. Например, выносливость марафонца во многом сходна с выносливостью лыжника-гонщика, велогонщика, конькобежца и т. п. Сила (F), скорость (V) и длительность (продолжительность) движения находятся в определенных соотношениях друг с другом. Это соотношение различно в разных видах деятельности (в разных видах спорта). При сокращении мышцы развивают большие усилия, которые зависят от поперечного сечения, начальной длины волокон и ряда других факторов. Сила мышцы на 1 см2 ее поперечного сечения называется абсолютной мышечной силой. Для человека она равна от 50 до 100 Н. Сила и мощность одних и тех же мышц зависят от ряда физиологических условий: возраста, пола, тренировки, температуры воздуха, исходного положения при выполнении упражнений, биоритмов и т. д. Внешнее проявление сократительной активности мышцы (пучка волокон или волокна) состоит в том, что при ее фиксированной длине развивается усилие, а при фиксированной нагрузке происходит укорочение. Эксперимент с мышцами проводится в двух режимах: изометрическом, когда длина мышцы фиксирована и изотоническом, когда мышца имеет возможность укорачиваться при постоянной нагрузке (рис. 14.1). На рисунке видно, что изометрическое усилие развивается очень быстро и достигает своей максимальной величины примерно через 170 мс после возбуждения. Начиная с 200 мс оно снова уменьшается с возрастающей скоростью. Интересно отметить, что даже через 900 мс в мышце еще сохраняется некоторое напряжение, что может быть обусловлено только активными физическими и химическими процессами. 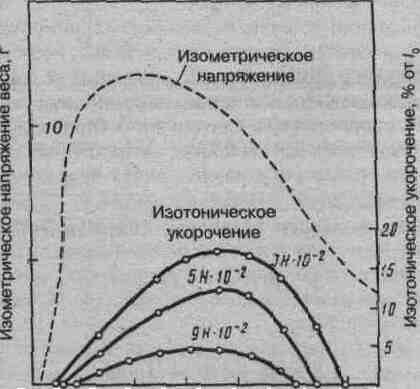 С 10О 200 ЗО0 W 500 ВОВ Время,с Рис. 14.1. Изометрическое и изотоническое одиночное сокращение. Портняжная мышца лягушки при 0°С (по В. Jewell, D. Wilkie, 1960) Изотоническое одиночное сокращение существенно отличается от изометрического. Укорочение в процессе изотонического одиночного сокращения начинается только тогда, когда в мышце развивается достаточное усилие, равное по величине внешнему. В результате одиночное сокращение начинается тем позднее, чем больше нагрузка. Укорочение вначале почти линейно зависит от времени и достигает максимальных значений тем раньше, чем больше нагрузка. Затем наступает расслабление мышц с возрастающей скоростью, причем, так же как и укорочение, оно завершается тем раньше, чем больше груз. Если сделать нагрузку равной тому полному изометрическому усилию, которое мышца способна развить, то никакого внешнего укорочения не произойдет. При нулевой нагрузке скорость укорочения, очевидно, должна быть максимальной. Соотношение между нагрузкой и установившейся скоростью укорочения показано на рис. 14.2. Для описания зависимости между силой и скоростью мышечного сокращения используют уравнение Хилла (А. Hill, 1938). V=b(F0 –F)·(F+a) или F=(Fo+a)(v/b+l)-a, где V— скорость укорочения; F — сила (нагрузка); F0 — максимальная изометрическая сила, которую может развить мышца; b — константа, имеющая размерность силы. Максимальная скорость, соответствующая условно F = 0, из уравнения Хилла равна bF0/a. При раздражении мышцы серией импульсов, следующих с постоянной частотой, второй и последующие импульсы будут оказывать разное действие в зависимости и от того, на какой участок кривой «сила — время» они попадут. 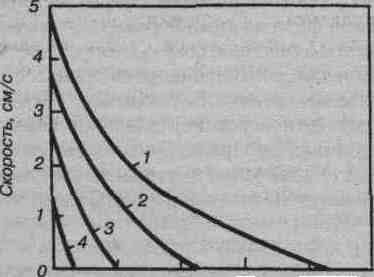 10 20 30 40-10-2 Сила, Н Рис. 14.2. Зависимость скорости от нагрузки на различных стадиях изотонического одиночного сокращения портняжной мышцы лягушки при 0С: 1 — фаза развития напряжения, 2—4 — фазы расслабления (0,46; 0,64; 0,83 с); напряжение составляет 0,6; 0,3 и 0,08 максимального В описанных экспериментах (исследованиях) изотоническое укорочение или изометрическое усилие измерялось на мышцах, длина которых была близка к длине расслабленной мышцы или несколько превосходила ее. 2.Характеристика двигательных (локомоторных) качеств К основным двигательным качествам относятся: сила, быстрота, выносливость, гибкость и ловкость. А.А. Тер-Ованесян к названным качествам добавляет: устойчивость равновесия, способность к произвольному расслаблению мышц, ритмичность, прыгучесть, мягкость движений, координированность. Механика мышечного сокращения. В покое мышечная ткань представляет собой вязко-упругий материал с самыми обычными свойствами (F. Buchthal, E. Kaiser, 1951; Р.М. Rack, 1966). Подлинно интересное свойство мышцы — это ее способность к сокращению. Максимальная сила, которую может развить мышца, при оптимальной ее длине составляет около 2-106 дин на 1 см2 поперечного сечения мышцы. Если противодействующая сила невелика, мышца не только сильнее укорачивается, но и быстрее сокращается. Если сокращающаяся мышца имеет длину / в момент времени t, то скорость ее укорочения: dl/dt («минус» означает уменьшение длины) определяется по формуле: dl/dt = (F1-F)·b/F+a где F — сила, которую преодолевает мышца, F1 — максимальная сила мышцы при той длине, при которой измеряется скорость ее укорочения, d и b — константы. Константа d равна около 4 ·105 дин на 1 см2 поперечного сечения мышцы, а константа b для разных мышц различна (A.N. Hill, 1956). Заметим, что даже при отсутствии силы, противодействующей сокращению, мышца укорачивается с ограниченной скоростью: если F = 0, то dl/dt =F1·b/a. Если неподвижно закрепить концы мышцы и заставить ее сокращаться, то максимальная сила сокращения будет зависеть от расстояния между концами мышцы. Эта сила уменьшится, если расстояние будет меньше длины мышцы в покое. Сила сокращения уменьшается и в том случае, если расстояние между концами мышцы будет больше ее длины в покое. Под силой сокращения имеется в виду разность между общей силой, которую развивает мышца при ее раздражении, и упругой восстанавливающей силой, обусловленной растяжением мышцы сверх ее нормальной длины. Зависимость силы от длины было показано на изолированных поперечнополосатых мышечных волокнах (Edman К., 1966; GordonA.M.etat, 1966). Поперечные полосы мышечного волокна раздвигаются при его растяжении и сближаются при сокращении. На рис. 14.3 приведен график зависимости между силой сокращения волокна и расстояниями между соседними полосами. В расслабленных волокнах эти расстояния равны 2,1 мк (1 мк = i0-4 см). Сила сокращения достигает максимума при расстоянии 2,0—2,2 мк, и эта сила принята за 100%. При расстояниях 1,3 и 3,7 мк сила равна нулю. Это можно объяснить на основании «теории скользящих нитей». 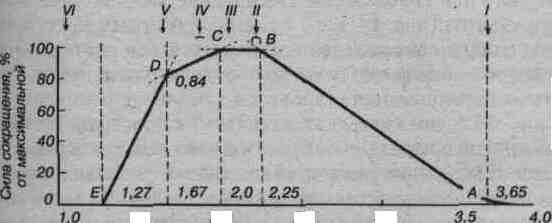 1,5 2,0 2,5 3.0 Расстояние между полосами, мк Рис. 14.3. Зависимость силы сокращения поперечнополосатого мышечного волокна от расстояния между соседними пластинками (A.M.Gordonetal.,1966) Поперечнополосатое мышечное волокно представляет собой клетку, содержащую многочисленные фибриллы, которые сами имеют поперечную исчерченность. На рис. 14.4 представлена схема строения фибриллы, основанная на электронных микрофотографиях. Фибрилла состоит из продольных нитей, построенных из белков актина и миозина; нити актина входят своими концами в промежутки между нитями миозина. Эти нити образуют структуру, которая повторяется на всем протяжении волокна и лежит в основе поперечной исчерченности, видимой в обычный микроскоп. Нити актина — более тонкие, они лежат на участке b (см. рис. 14.4). 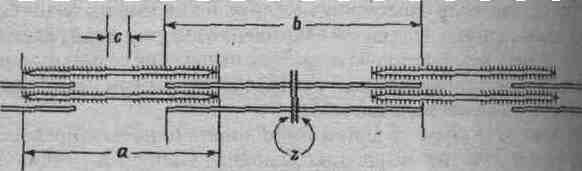 Рис. 14.4. Схема расположения субмикроскопических нитей в поперечнополосатом мышечном волокне (А.М. Gordon et al., 1966) Они проходят сквозь поперечные перегородки, называемые пластинками. Миозиновые нити (рис. 14.4, а) толще и снабжены боковыми выступами, которые прикрепляются к нитям актина, образуя мостики. Полагают, что именно благодаря этим мостикам мышцы развивают силу при сокращении. Посередине каждой нити миозина имеется участок (рис. 14,4, с), лишенный боковых выступов. Когда мышца сокращается или подвергается растяжению, нити актина и миозина скользят друг относительно друга, так что область их перекрывания становится длиннее или короче. 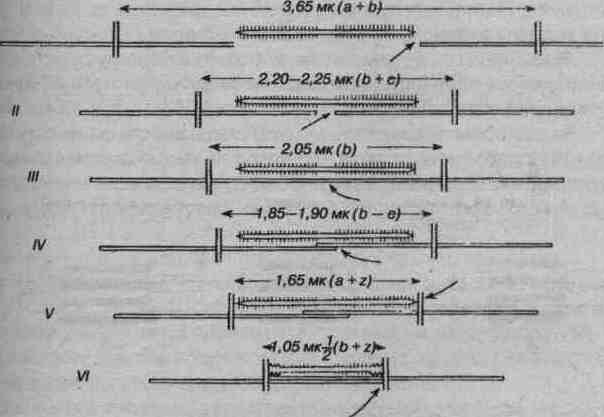 Рис. 14.5. Схема, показывающая степень перекрывания нитей миозина и актина в поперечнополосатом мышечном волокне при различных расстояниях между соседними пластинками Z (А.М. Gordon et al., 1966) На рис. 14.5, показано, как изменяются пространственные отношения нитей при различных расстояниях между соседними пластинками Z (т. е. при различной плотности расположения поперечных полос). Эти расстояния для представленных здесь случаев I—VI указаны также стрелками с соответствующими цифрами на рис. 14.3. При расстоянии 3,65 мк (положение I) нити актина и миозина уже не накладываются друг на друга и можно ожидать, что волокно не будет способно развивать силу; и действительно, примерно при таком растяжении сила сокращения падает до нуля. По мере сближения пластинок Z нити актина все глубже проникают в промежутки между нитями миозина, и, наконец, при расстоянии 2,2 мк (положение П) все боковые выступы на миозиновой нити приходят в контакт с нитью актина, образуя поперечные мостики. Если именно эти мостики ответственны за возникновение силы, то следует ожидать, что в диапазоне от положения I до положения II сила будет пропорциональная степени перекрывания нитей, и это подтверждается в исследованиях. При дальнейшем укорочении волокна число мостиков, которые могут образоваться, не изменяется, и сила остается постоянной, пока расстояние между пластинками 7 не уменьшится до 2,05 мк (положение III). В этот момент нити актина сходятся своими концами и сила начинает убывать. Она продолжает медленно убывать, пока расстояние не достигает 1,65 мк (положение V), когда концы миозиновых нитей приходят в соприкосновение с пластинками Z. При дальнейшем сокращении нити миозина должны сминаться; сила начинает убывать быстрее и, наконец, совсем исчезает. |