Мобильный робот с СТЗ. Курсовая работа по дисциплине Компьютерное управление мехатронными системами
 Скачать 6.31 Mb. Скачать 6.31 Mb.
|

|
Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования «Курский государственный технический университет» Кафедра теоретической механики и мехатроники КУРСОВАЯ РАБОТА по дисциплине «Компьютерное управление мехатронными системами» (наименование учебной дисциплины) на тему «Система автоматического управления мобильного робота, оснащенного системой технического зрения» Специальность (направление подготовки) Мехатроника, 220401 (код, наименование) Автор работы (проекта) Савин С. И. ____________________ (инициалы, фамилия) (подпись, дата) Группа МТ-61_________ Руководитель работы (проекта) Яцун С. Ф. ___________________ (инициалы, фамилия) (подпись, дата) Работа (проект) защищена ________________________ (дата) Оценка_____________________ Председатель комиссии Яцун С. Ф. (подпись, дата) (инициалы, фамилия) Члены комиссии Лушников Б. В.. (подпись, дата) (инициалы, фамилия) ___________________________________________ (подпись, дата) (инициалы, фамилия) Курск, 2010 г. Оглавление Введение……………………………………………………..……....3 Техническое задание………………………………………………..4 Анализ существующих конструкций……………………….5 Описание объекта управления…………………………........9 Функциональная схема устройства…………………………13 Структурная схема устройства……………………………...14 Настройка регулятора ………………………………………19 Моделирование системы автоматического управления…..24 Исследование характеристик системы средствами MATLAB………………………………………………26 8. Выбор электронных компонент…………………………….30 8.1. Микроконтроллер…………………………………….30 8.2. Драйверная схема……………………………………..32 8.3. Энкодер………………………………………………..32 8.4. Цифровая камера……………………………………...33 8.5. Схема, организующая обмен данными по интерфейсу USB………………………………………………..34 8.6. Мобильный ПК……………………………………….34 9. Проектирование схем управления…………………………36 10. Алгоритмы управления……………………………………..38 11. Библиографический список………………………………..38 Введение Цель данного проекта – разработать систему автоматического мобильного колёсного робота танкового типа, оснащенного системой технического зрения. При разработке системы автоматического управления следует учесть повышенные требования, предъявляемые к точности перемещения, связанные с наличием системы технического зрения. Задающим воздействием для робота будет контрастная полоса, на нанесённая на поверхность, по которой перемещается робот. Задача робота – не отклоняясь более чем на заданное значение, следовать полосе. Должна быть обеспечена плавность движения, требуемая для качественной съёмки камерой. Техническое задание на курсовую работу Согласовано: руководитель курсовой работы Яцун Сергей Федорович (подпись, дата) Разработать цифровую систему автоматического управления приводами мобильного трёхколёсного робота танкового типа, оснащенного техническим зрением. Максимальное отклонение от полосы – 0.3 м (считая от середины корпуса). Колебательность САУ – недопустима. Обеспечить скорость линейного перемещения робота в диапазоне от 0 до 1,2 м/с Температура: -10 - +30°С Влажность: 10-80% Давление: 760 +/- 20 мм рт. ст. Компоненты: Размер электронных схем – не более 300 мм в ширину и 400 мм в длину. Энергопотребление электронных схем – до 1 А информационные схемы, до 15 А – силовые схемы. На борту устанавливается мобильная ЭВМ. Используется камера с разрешением не менее 640 на 480 пикселей. Бортовая сеть обеспечивает напряжение от 12 В. В качестве приводов колёс используются мотор-редукторы с следующими характеристиками: Напряжение питания – 12 В. Номинальная частота вращения – 70 об/мин. Вес – 1 кг. Интерфейсы: USB. 1. Анализ существующих конструкций В последние десятилетия происходит бурное развитие робототехники. Появляются сотни моделей роботов, различных конструкций, назначения. Особенно активно начали развиваться мобильные роботы [1]. Разработаны мобильные роботы, для работы в различных средах – в воздухе, в воде, на земле. Роботы различаются так же по назначению – военные роботы, медицинские, бытовые, роботы-игрушки, промышленные роботы, роботы, для работы в чрезвычайных ситуациях. Преимущественно это наземные роботы. Среди наземных роботов так же можно выделить множество типов. Это шагающие, ползающие, колёсные, гусеничные, инерционные, прыгающие и катящиеся роботы. Из перечисленных типов только шагающие, гусеничные и колёсные получили значительное развитие. Каждый из этих типов имеет своё назначение. Гусеничные роботы разрабатываются для работы в реальных условиях. Преимущественно эти роботы разрабатываются для вооруженных сил и служб, работающих с чрезвычайными ситуациями. Шагающие роботы привлекательны своим высоким потенциалом для работы в недетерминированных средах. Колесные роботы так же имеют ряд преимуществ – простота конструкции и управления, высокая манёвренность, грузоподъёмность [9]. Среди колёсных роботов можно выделить четырёх- и трехколёсных роботов. Трёхколёсные роботы в свою очередь делятся на роботов танкового типа и роботов с рулевым колесом. Так же в последние десятилетия всё более активно развиваются системы технического зрения. Это связанно как с достижениями в области технологий распознавания, так и с общим прогрессом в области вычислительной техники. Появление всё более мощных вычислителей позволяет значительно ускорить процесс распознавания, и обрабатывать большее количество информации. Становится возможным решить при помощи подобных систем весьма широкий спектр задач: поиск и оптимизация маршрута передвижения мобильного автоматического объекта, поиск заданного предмета, автоматическое составление карты местности, распознавание лица человека, организация обратной связи в промышленных автоматах, задачи слежения, диагностики. Кроме возможностей по решению широкого спектра задач системы технического зрения имеют ряд других положительных качеств. К ним можно отнести сравнительно малые размеры механической части системы. Как правило, это камера, схема первичного преобразования изображения, интерфейс для соединения с ЭВМ. Так же можно говорить об относительно низкой стоимости подобных решений. Кроме того, система технического зрения может работать как в детерминированных, так и в недетерминированных средах. К недостаткам подобных систем можно отнести наличие пропорциональной зависимости «точность распознавания» - «объем обрабатываемой информации» - «стоимость». Данный недостаток компенсируется постоянным снижением стоимости вычислителей, но всё же ограничивает использование систем машинного зрения областями, не требующими особо высокой точности [8]. При проектировании современных автоматизированных систем, стратегия управления всё чаще подразумевает использование систем технического зрения, как основной источник информации о внешней среде. Особенно актуально использование системы технического зрения, как части системы автоматического управления мобильного робота [9, 10]. Разработкой мобильных роботов, оснащенных техническим зрением, занимаются крупнейшие научно-исследовательские центры. На данный момент создано значительное количество образцов подобной техники. Примером может служить разработанный в Испании, в университете Кастелло (University of Kastello) робот, выполняющий функции библиотекаря. Робот представляет собой манипулятор перемещающийся на трёхколёсной платформе, оснащённый камерами и другими датчиками. Он использует техническое зрение для поиска необходимой книги. Для улучшения поиска используется система лазерного и инфракрасного наведения. С  уществуют так же мобильные роботы, позиционируемые как бытовые, оснащенные техническим зрением. Более того, большая часть современных высокотехнологичных роботов, предназначенных для бытового использования оснащается системами технического зрения. Это позволяет им ориентироваться в недетерминированной среде, облегчает коммуникацию с человеком. Примером подобного устройства является робот Rovio, компании WowWee (см. рис. 1). Робот выполняет охранные функции. Систему технического зрения дополняет фирменная технология «microGPS». В совокупности они позволяют ему ориентироваться в помещениях, искать станцию подзарядки. Робот является трёхколёсным. уществуют так же мобильные роботы, позиционируемые как бытовые, оснащенные техническим зрением. Более того, большая часть современных высокотехнологичных роботов, предназначенных для бытового использования оснащается системами технического зрения. Это позволяет им ориентироваться в недетерминированной среде, облегчает коммуникацию с человеком. Примером подобного устройства является робот Rovio, компании WowWee (см. рис. 1). Робот выполняет охранные функции. Систему технического зрения дополняет фирменная технология «microGPS». В совокупности они позволяют ему ориентироваться в помещениях, искать станцию подзарядки. Робот является трёхколёсным.Примером робота, использующего техническое зрение, так же является «Diana» - трёхколёсный робот с рулевым колесом, описанный в статье [4] (см. рис. 2). Этот робот предназначен для охраны помещений. Он оснащен датчиком дыма, локатором, лазерным дальномером. Управление роботом может осуществляться посредством специального управляющего компьютера, обменивающегося с бортовым компьютером робота информацией по протоколу Wire-Fire, удалённо, использую технологию GSM, посредством пульта (см. рис. 3). В качестве бортового компьютера используется промышленный компьютер. Следует отметить, что использование систем технического зрения создаёт дополнительные требования к системе автоматического управления. Так, например, недопустим тремор.  2. Описание объекта управления О  снащение мобильного робота системой технического зрения создает определённые требования к механике, электронике и системе автоматического управления роботом. Так для компенсации малого угла обзора камеры её устанавливают на некоторую подвижную платформу. У различных моделей роботов она имеет одну, две или три степени свободы. Так же для обработки информации, поступающей с камеры, требуется мощный вычислитель. Различные модели роботов оснащают высокопроизводительными контроллерами, промышленными компьютерами, ноутбуками. На настоящий момент в качестве бортового вычислителя всё чаще используется ноутбук. Это связанно с низким энергопотреблением, малым весом и габаритными размерами. Кроме того, подобное решение упрощает построение каналов обмена информацией с роботом, для этой цели можно использовать любую технологию беспроводной передачи данных, поддерживаемую мобильным персональным компьютером [11-17]. снащение мобильного робота системой технического зрения создает определённые требования к механике, электронике и системе автоматического управления роботом. Так для компенсации малого угла обзора камеры её устанавливают на некоторую подвижную платформу. У различных моделей роботов она имеет одну, две или три степени свободы. Так же для обработки информации, поступающей с камеры, требуется мощный вычислитель. Различные модели роботов оснащают высокопроизводительными контроллерами, промышленными компьютерами, ноутбуками. На настоящий момент в качестве бортового вычислителя всё чаще используется ноутбук. Это связанно с низким энергопотреблением, малым весом и габаритными размерами. Кроме того, подобное решение упрощает построение каналов обмена информацией с роботом, для этой цели можно использовать любую технологию беспроводной передачи данных, поддерживаемую мобильным персональным компьютером [11-17].Было проведено проектирование конструкции мобильного робота. При проектировании преимущественно использовались стандартные детали, нестандартных деталей от общего числа типов деталей – менее 8%, а от общего количества – менее 2%. Используется трехколесная конструкция робота танкового типа. Подобная конструкция обладает высокой маневренностью и относительно высокой скоростью. Робот приводится в движение двумя независимыми приводами постоянного тока, соединенными с ведущими колёсами. В качестве приводов использованы мотор-редукторы (напряжение питания – 12 вольт, рабочий ток – 1.2 ампера). Питание осуществляется от бортовых аккумуляторов (12 вольт). В качестве бортового вычислителя используется ноутбук. На роботе установлена камера и два источника лазера. Камера источники лазера находятся на подвижной платформе, способной вращаться и совершать поступательные движения в вертикальном направлении (см. рисунки 4). В качестве приводов в данной платформе используются мотор-редукторы.  Следует так же отметить, что спроектированная конструкция обладает простотой сборки. Для облегчения транспортировки робота, он может быть разобран на составные части, и, таким образом, перевезён в более компактном виде. Масса робота без аккумуляторов (оценочная) – 7 килограмм (расчеты проводились с принятием массы бортового компьютера равной 3 килограммам). Расчетная максимальная скорость – 0,8 – 1 м/с (2.88 – 3.6 км/ч). Робот способен осуществлять поворот на месте. Время осуществления роботом поворота на 180 градусов – порядка одной секунды. 3D-модель и чертежи робота представлены на рисунках 5, 6, 7 и 8.   Обозначения: Бортовой компьютер (ноутбук). Аккумулятор. Источник лазера. Камера. Мотор-редуктор. Направляющая. Привод (мотор-редуктор). Пассивное колесо. Ведущее колесо. В данном проекте будет осуществляться построение системы автоматического управления ведущего колеса робота (см. рис 6, 7 под цифрой 9). 3. Функциональная схема устройства: Источником управляющего воздействия для робота является контрастная полоса. В процессе движения робот производит съёмку полосы с помощью камеры и обрабатывает изображение с помощью ресурсов бортовой ЭВМ. Функциональная схема работы робота представлена на рисунке 9  Структурная схема устройства. WPID (p)   WPID (p) WM (p) WЦАП(p)   энкодер WM (p) WЦАП(p) энкодер Передаточные функции: WРегулятор – передаточная функция регулятора, генерирующего управляющее воздействие для САУ приводов колёс. WPID (p) – передаточная функция регулятора в САУ привода колеса. WM (p)- передаточная функция двигателя колеса. WОС (p) – передаточная функция обратной связи в САУ привода колеса. WR (p)– передаточная функция редуктора в САУ привода колеса. WЦАП (p)– передаточная функция ЦАП. Определим передаточные функции: Работу привода можно описать следующими уравнениями:  (1) Основные параметры двигателя приведены в таблице 1.
Таблица 1. Основные параметры двигателя. (2)  Константы Се и Cm найдём по следующим формулам: (3) (4) З  апишем уравнение (1) для пространства Лапласа: апишем уравнение (1) для пространства Лапласа:(5) Выразим из второго уравнения системы (5) ток и подставим в первое:  (6) Раскрывая скобки, получим: (7) Преобразуем выражение (7) к виду: (8) Отсюда находим передаточную функцию:  (9) Передаточная функция обратной связи: Wос (p) = 1. Передаточная функция редуктора WR (p) = 0.026. Передаточная функция ЦАП WЦАП (p) = 1. 5. Настройка регулятора. Для настройки ПИД регулятора – определения значений коэффициентов регулятора – воспользуемся встроенными средствами среды Simulinc. Подбор коэффициентов будем осуществлять с помощью блока NCD OutPort. Зададим настройки блока NCD OutPort (рис. 14, 15) и ПИД регулятора PID Controller (рис. 11). 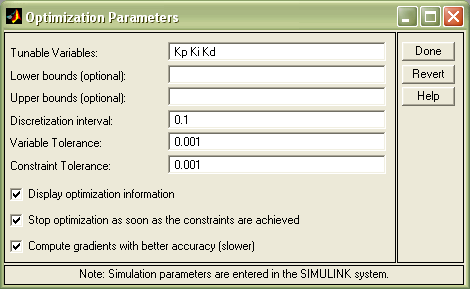 Рисунок 11. Настройки блока NCD OutPort. 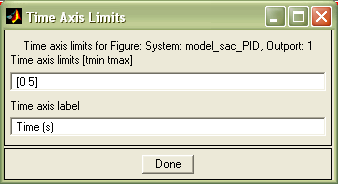 Рисунок 12. Настройки блока NCD OutPort. 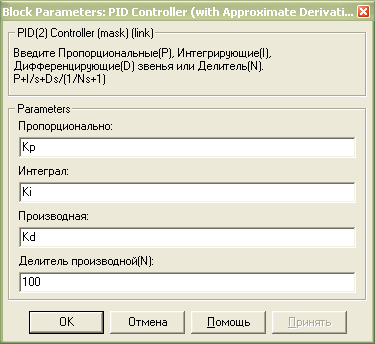 Рисунок 13. Параметры ПИД регулятора PID Controller. В блоке NCD OutPort зададим ограничения для графика переходного процесса (рис 17). 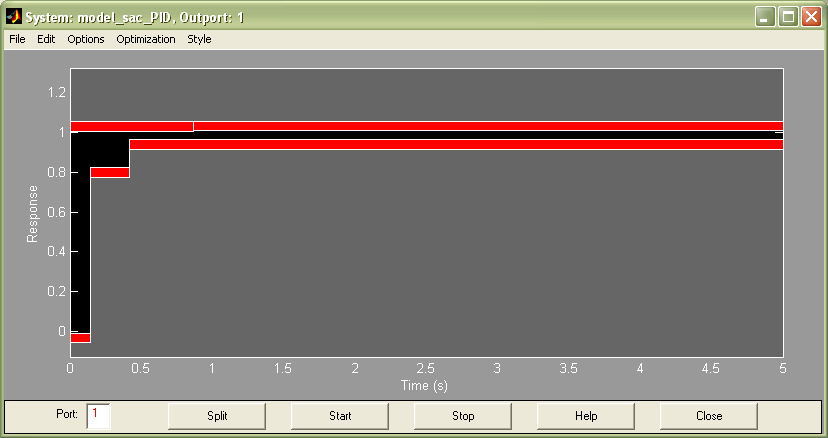 Рисунок 14. Выставленные ограничения для графика переходного процесса в блоке NCD OutPort. Блок NCD OutPort производит автоматическую коррекцию параметров Kp, Ki и Kd. Полученный график переходного процесса представлен на рисунке 15 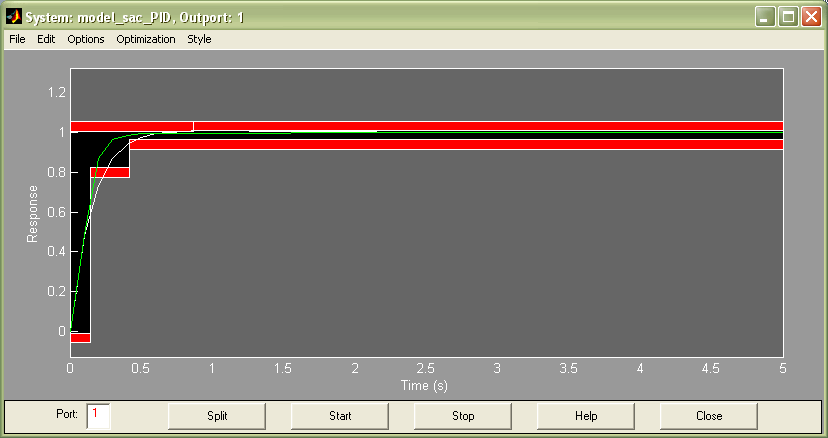 Рисунок 15. Полученный график переходного процесса в блоке NCD OutPort. Значения коэффициентов, полученных оптимизацией в блоке NCD OutPort: Kp = 1,1429 Ki = 0,9778 Kd = -0,058 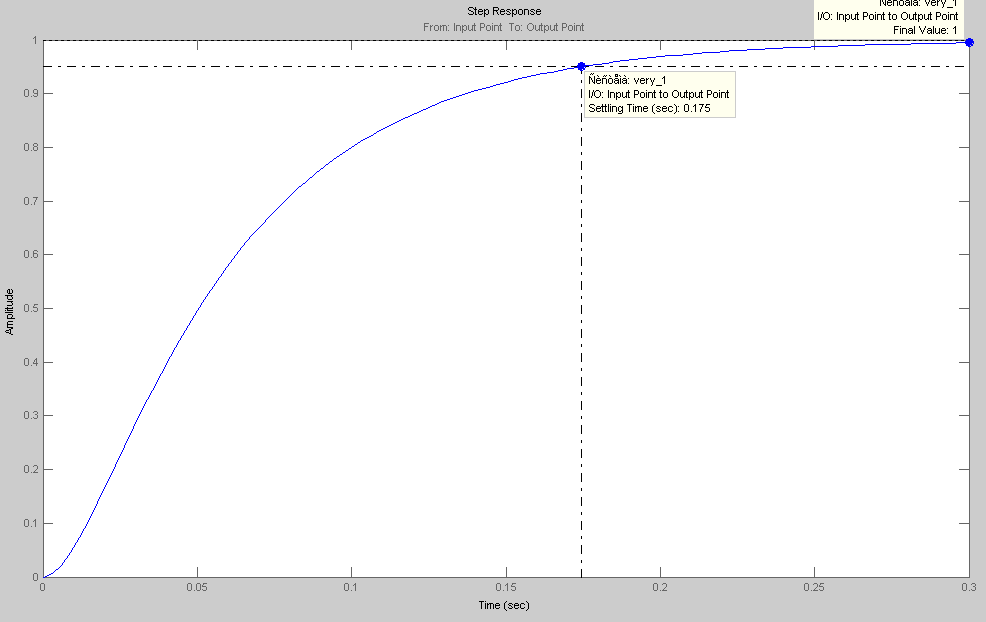 Рисунок 16. Реакция системы на единичное ступенчатое воздействие. Определим передаточную функцию разомкнутого контура системы автоматического управления приводом колеса: Wраз = Wус (p) ∙ Wдвигателя (p) ∙ Wредуктора (p) ∙ WПИД-регулятора (p)  Определим передаточную функцию замкнутого контура системы автоматического управления приводом колеса:   Характеристическое уравнение замкнутой системы имеет вид: Перейдем в Z-пространство используя средства математического пакета VisSim. 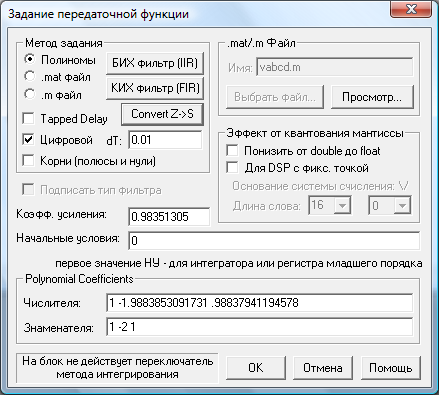 Рисунок 17. Переход в Z-пространства средствами VisSim.  Рисунок 18. Дискретная передаточная функция полученная средствами VisSim. 6. Моделирование системы автоматического управления. Проведём моделирование системы автоматического управления средствами программного пакета MATLAB. Воспользуемся расширением данного программного продукта – средой моделирования Simulink.      7. Исследование характеристик системы средствами MATLAB. Проведён ряд численных экспериментов средствами программного пакета MATLAB. Система испытана при различных формах пути, а так же с учётом и различных свойств видеокамеры.    y x Максимальное отклонение e = 0.1 м.  x y  Максимальное отклонение e = 0.1 м.   x  y Максимальное отклонение e = 0.15 м.  x y Максимальное отклонение e = 0.2 м.  x y Максимальное отклонение e = 0.2 м.  x y Максимальное отклонение e = 0.2 м.  x y Максимальное отклонение e = 0.1 м. На рисунках 16-19 приведены результаты моделирования, без учёта дискретности камеры. На рисунке 20 – результаты моделирования с учетом дискретности камеры (период квантования – 0.1 с), на рисунках 21-22 - результаты моделирования с учетом дискретности камеры (период квантования – 0.01 с) В ходе численных экспериментов было установлено, что максимальное отклонение робота от контрастной полосы составляет 20 см, что удовлетворяет техническому заданию. 8. Выбор электронных компонент. Рассматривая структурную схему системы автоматического управления (см. рис. 10) можно сделать вывод о количестве необходимых компонент для реализации цифровой САУ. Представим список необходимых компонент: микроконтроллер; драйверная схема; энкодер; цифровая камера; мобильный ПК; схема, организующая обмен данными по интерфейсу USB. 8.1. Микроконтроллер. Будем использовать микроконтроллер ATmega16 компании ATmel. Основными достоинствами контроллера являются: AVR RISC-архитектура - архитектура высокой производительности и малого потребления; · система команд содержит 130 инструкций, большинство которых выполняется за один машинный цикл; · единый 16-разрядный формат команд; · производительность 16 MIPS на частоте 16 Мгц; · наличие аппаратного умножителя; · 16 Кбайт Flash ПЗУ программ, с возможностью до 1000 циклов стирания/записи; · 512 байт ЭСППЗУ (EEPROM) данных, с возможностью до 100000 циклов стирания/записи; · 1 Кбайт оперативной памяти (SRAM); · возможность программирования непосредственно в целевой системе через последовательные интерфейсы SPI и JTAG; · возможность самопрограммирования; · возможность внутрисхемной отладки в соответствии со стандартом IEEE 1149.1 (JTAG); · различные способы синхронизации: встроенный RC-генератор с внутренней и внешней задающей RC-цепочкой или с внешним резонатором (пьезокерамическим или кварцевым); внешний сигнал синхронизации; · 6 режимов пониженного энергопотребления (Idle, ADC Noise Reduction, Power-save, Power-down, Standby и Extended Standby); · детектор снижения напряжения питания (BOD); · программное снижение частоты тактового генератора; · 21 источник прерываний (внутренних и внешних); · многоуровневая система прерываний, поддержка очереди прерываний; · возможность защиты от несанкционированного чтения и модификации памяти программ и данных; · загрузочный сектор с независимыми битами защиты; · возможность чтения памяти программ во время ее записи; · два 8-разрядных таймера/счетчика с предварительным делителем частоты и режимом сравнения; · 16-разрядный таймер/счетчик с предварительным делителем частоты, режимом сравнения и режимом внешнего события; · сторожевой таймер WDT; · четыре канала генерации выходных ШИМ-сигналов; · аналоговый компаратор; · 8-канальный 10-разрядный АЦП как с несимметричными, так и с дифференциальными входами; · полнодуплексный универсальный синхронный/асинхронный приемопередатчик USART; · последовательный синхронный интерфейс SPI, используемый также для программирования Flash-памяти программ; · последовательный двухпроводный интерфейс TWI (аналог I2C) · 32 программируемые линии ввода/вывода с уровнями ТТЛ; на эти линии выведена также поддержка периферийных функций; · напряжения питания 2.7 … 5.5 В.  Рисунок 31. Микроконтроллер ATmega16 компании ATmel. 8.2. Драйверная схема. Будем использовать двунаправленный драйвер двигателей постоянного тока MoviPower Lite компании Movicom. Основными достоинствами драйвера являются: Рабочее напряжение: 5.5 ÷ 36 В Рабочий ток: до 8 A Пиковый ток: до 30 A Частота ШИМ (макс.): 20 кГц Реверсивное управление Защита от перегрузки по току и от перегрева Спящий режим  Рисунок 32. Драйвер двигателей постоянного тока MoviPower. 8.3. Энкодер. Будем использовать инкрементный энкодер ECW1J-B28-BC0024L компании Bourns.  Рисунок 33. Инкрементный энкодер ECW1J-B28-BC0024L компании Bourns. 8.4. Цифровая камера. Будем использовать цифровую камеру Eye 312 компании Generous. Основными достоинствами решения являются: скорость съёмки до 10 кадров в секунду; разрешение 640 на 480 пикселей; относительно небольшие размеры; интерфейс USB.  Рисунок 34. Цифровая камера Eye 312 компании Generous. 8.5. Схема, организующая обмен данными по интерфейсу USB. Будем использовать схему K8055 USB Experiment Interface Board компании Velleman.  Рисунок 35. Схема K8055 USB Experiment Interface Board компании Velleman. 8.6. Мобильный ПК. Будем использовать ноутбук Samsung R60 Rlus. Основные параметры решения перечислены в таблице 2.  Рисунок 36. Ноутбук Samsung R60 Rlus. 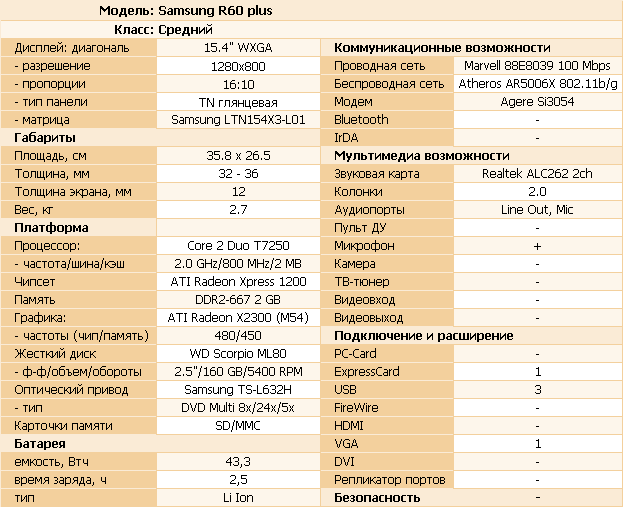 Таблица 2. Основные параметры ноутбука Samsung R60 Rlus. 9. Проектирование схем управления. С учетом выбранных компонентов спроектируем управляющую плату. Принципиальная схема управляющей платы представлена на рисунке 23. 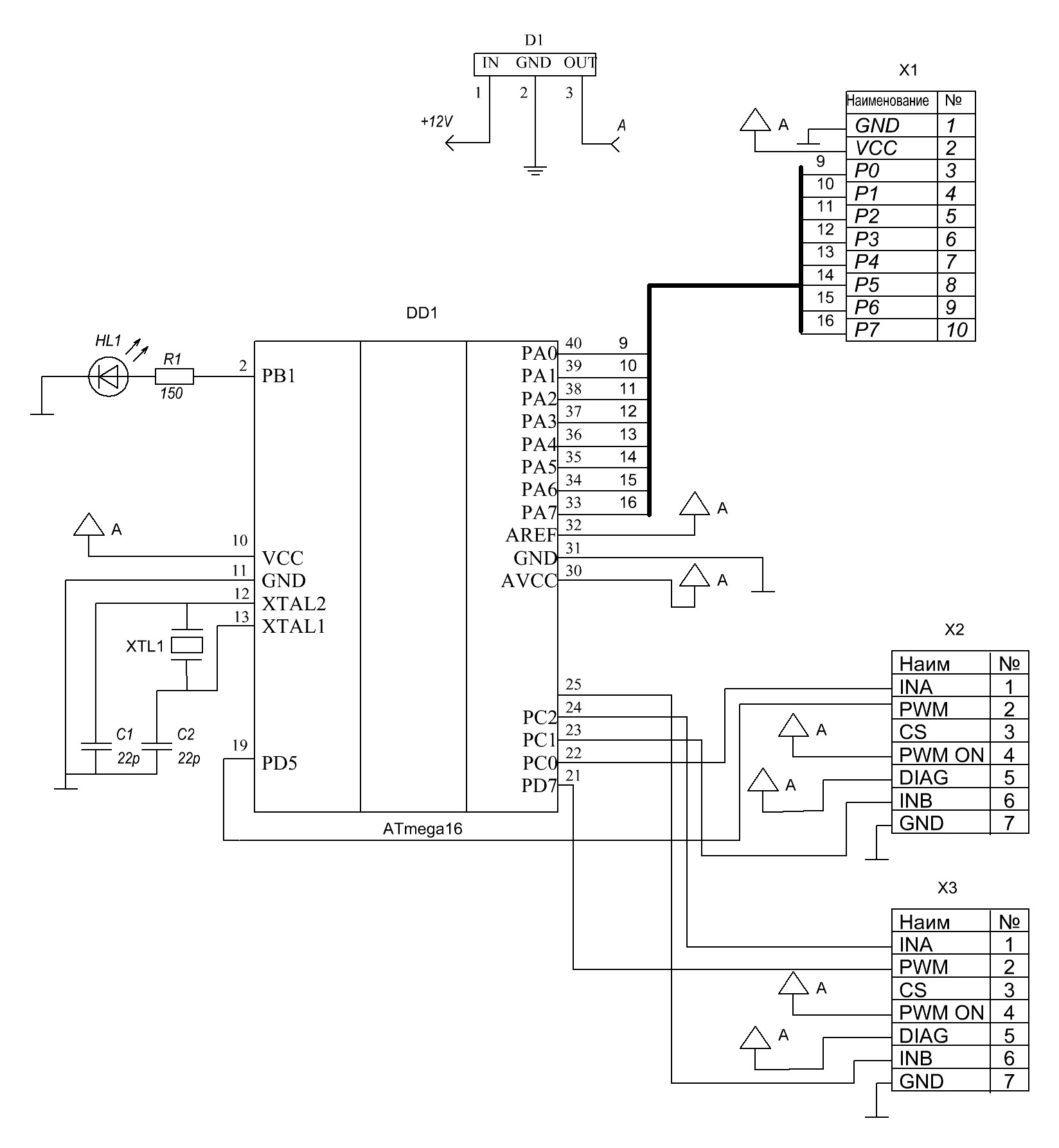 Рисунок 37. Управляющая плата. Принципиальная схема. Обозначения: D1 – стабилизатор на 5В; DD1 – микроконтроллер ATmega16; X1 – разъём под шлейф на схему K8055 USB Experiment Interface Board. X2, X3 – разъёмы под шлейф на драйверные схемы MoviPower Lite; XTL1 – резонатор 8МГц; R1 – резистор 200 Ом; С1, С2 – конденсаторы, 22 пФ; HL1 – светодиод. 10. Алгоритмы управления.  Рисунок 38. Алгоритм работы контроллера, управляющего приводами колёс.  Рисунок 39. Реализация генерации управляющих воздействий контроллера управляющего приводами колёс. Библиографический список Подураев Ю.В. Мехатроника: основы, методы, применение: учеб. пособие для студентов вузов. // М.: Машиностроение, 2006 - 256 с. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. // СПб.: Профессия, 2003 - 752 с. Воронов А.А., Титов В.Н., Новогранов Б.Н. Основы теории автоматического регулирования и управления. Учеб. Пособие для вузов. // М.: Высшая школа, 1977 - 519 с. http://www.prorobot.ru/myrobot/robot-diana.php Брюханов В.Н., Косов М.Г., Протопопов С.П., Соломенцев Ю.М., Султан-Заде Н.М., Схиртладзе А.Г. Теория автоматического управления. // М.: Высшая школа. 2000 - 268 с. Мошкин В.И., Петров А.А., Титов В.С., Якушенков Ю.Г. Техническое зрение роботов // М.: Машиностроение, 1990 - 272с. Фрайден Дж. Современные датчики. Справочник. // М.: Техносфера, 2005 - 592с. Егоров О.Д., Подураев Ю.В. Конструирование мехатронных модулей // М.: ИЦ МГТУ «СТАНКИН», 2004 – 360с. Половко С.А. Интеллектуальные системы технического зрения для безопасности и навигации [Текст] / С.А. Половко, Е.Ю. Смирнова, Д.Н. Степанов // Мехатроника, автоматизация, управление. №3, 2009 г. / Москва, 2009. – с. 33-39. Крайлюк А.Д. Основы концепции развития робототехники военного назначения до 2030 г. [Текст] / А.Д. Крайлюк, В.И. Комченков, А.А. Ивлев // Мехатроника, автоматизация, управление. №3, 2009 г. / Москва, 2009. – с. 10-15. Савин С.И. Мобильная платформа передвижного диагностического комплекса [Текст] / С.И. Савин // Информационно-измерительные, диагностические и управляющие системы. Диагностика – 2009: сб. материалов Междунар. научн.-техн. конф. Ч. 1. / Курск. гос. техн. ун-т. – Курск, 2009. – с. 135-138. Пат. на полезную модель №89837 Российская Федерация U1 МПК B62D57/00. Мобильный робот с камерой и направленными источниками лазера [Текст] / Яцун С.Ф., Савин С.И.; заявитель и патентообладатель ГОУ ВПО «Курский государственный технический университет» - №2009131365/22; заявл. 17.08.09; опубл. 20.12.09. Савин С.И. Проектирование конструкции мобильного робота, оснащенного системой технического зрения [Текст] / С.И. Савин, Аль-Еззи Абдулракеб Саид Яхья // Современные инструментальные системы, информационные технологии и инновации. Материалы VII Международной научно-технической конференции. / Курск. гос. техн. ун-т. – Курск, 2010. – с. 165-169. Савин С.И. Применение технического зрения для повышения эффективности работы системы автоматического управления мобильного робота [Текст] / С.И. Савин // Материалы докладов IV Международной молодёжной научной конференции «Тинчуринские чтения» / Под общ. ред. д-ра физ.-мат. наук, проф. Ю.Я. Петрушенко. В 4 т.; Т. 3. / Казан. гос. энерг. ун-т. – Казань, 2009. – с. 171-172. Сойфер В.А. Методы компьютерной обработки изображений [Текст] / В.А. Сойфер, ФИЗМАТЛИТ. – Москва, 2003. Савин С.И. Программное управление мобильным роботом, оснащенным системой технического зрения [Текст] / С.И. Савин // Приоритетные направления современной науки глазами молодых учёных. / Ряз. гос. ун-т им. С.А. Есенина. – Рязань, 2009. – с. 210-212. Савин С.И. Организация программного управления мобильным роботом [Текст] / С.И. Савин // Современные инструментальные системы, информационные технологии и инновации. Материалы VII Международной научно-технической конференции. / Курск. гос. техн. ун-т. – Курск, 2010. – с. 169-172. |