Курсовая работа по дисциплине Системы автоматизированного проектирования и конструирования измерительных приборов на тему Компенсационный акселерометр
 Скачать 1.99 Mb. Скачать 1.99 Mb.
|

|
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Тульский государственный университет» Институт высокоточных систем им. В. П. Грязева Кафедра «ПРИБОРЫ И БИОТЕХНИЧЕСКИЕ СИСТЕМЫ» Курсовая работа по дисциплине: «Системы автоматизированного проектирования и конструирования измерительных приборов» на тему: «Компенсационный акселерометр» Выполнил: студент группы 120291 _________ Борзов М.С. (Подпись) (ФИО) Проверил: доцент каф. ПБС _________ Кулешов В.В. (Подпись) (ФИО) Тула, 2022 МИНОБРНАУКИ РОССИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «Тульский государственный университет» ИВТС им. В.П. Грязева Кафедра «Приборы и биотехнические системы» УТВЕРЖДАЮЗав. кафедрой ПБС ________А.В. Прохорцов ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ по дисциплине _Системы автоматизированного проектирования и конструирования измерительных приборов._ Студент _Борзов Максим Сергеевич__ Группа_120291_ Тема _Компенсационный акселерометр ___ Срок представления работы к защите “ 09 ”_июня____2022_г Исходные данные для проектирования: _размеры сердечника толщина a = 3 мм, высота центрального стержня магнитопровода b = 4 мм, расстояние между стержнями l=10мм. Параметры якоря: толщина якоря  , наружный радиус якоря , наружный радиус якоря  , воздушный зазор между якорем и сердечником , воздушный зазор между якорем и сердечником  , напряжение питания , напряжение питания  , частота , частота  . ________________________________________________________________________________________________________________________________ . ________________________________________________________________________________________________________________________________Содержание пояснительной записки курсовой работы 4.1 Патентно-библиографический поиск по теме работы. 4.2 Разработка математической модели прибора. Расчет элемента (трансформаторного датчика угла). 4.4 Разработка чертежа. 4.5 Заключение._________________________________ Перечень графического материала – сборочный чертеж акселерометра – лист формата А3; анализ и синтез системы – лист формата А2; расчет элемента – лист формата А3. 6. Дата выдачи задания 18_февраля_2022 г. Руководитель курсового проекта ____________________Кулешов В.В._ Задание принял к исполнению ___________________18.02.22_ (подпись, дата) Содержание Введение 4 УТВЕРЖДАЮ 2 Акселеро́метр — прибор, измеряющий проекцию кажущегося ускорения (разности между истинным ускорением объекта и гравитационным ускорением). Акселерометр представляет собой чувствительную массу, закреплённую в упругом подвесе. Отклонение массы от её первоначального положения при наличии кажущегося ускорения несёт информацию о величине этого ускорения. По конструктивному исполнению акселерометры подразделяются на однокомпонентные, двухкомпонентные, трёхкомпонентные. Соответственно, они позволяют измерять проекции кажущегося ускорения на одну, две и три оси.[10] Как работает акселерометр? Объяснить принцип работы акселерометра проще на механическом приборе. Он состоит из пружины, прикрепленной к корпусу, подвижной массы и демпфера. Масса или, проще сказать, грузик, крепится к пружине. С обратной стороны грузик поддерживает демпфер, гасящий вибрации грузика. Во время ускорения корпуса пружина деформируется (растягивается или сжимается) по противоположным осям под воздействием грузика, стремящегося сохранить свое первоначальное положение, то есть отстать или опередить корпус. На величине деформации и основываются вычисления прибора. Для получения информации о положении предмета в трехмерном пространстве используется три таких прибора, объединенных в один комплекс. Основными параметрами акселерометра являются: Масштабный коэффициент — коэффициент пропорциональности для линейной зависимости между измеряемым кажущимся ускорением и выходным сигналом (электрическим сигналом, частотой колебаний (для струнного акселерометра) или цифровым кодом). Рабочий диапазон частот. Пороговая чувствительность (разрешение) — величина минимального изменения кажущегося ускорения, которое способен определить прибор. Смещение нуля — разность между показаниями прибора и проекцией гравитационного ускорения на ось чувствительности при нулевом кажущемся ускорении. Случайное блуждание — среднеквадратичное отклонение от смещения нуля. Нелинейность — отклонение зависимости между выходным сигналом и кажущимся ускорением от линейной при изменении кажущегося ускорения. Погрешности: На величину выходного сигнала акселерометра в основном влияют: температура окружающей среды и места крепления акселерометра (температурные погрешности); внешние магнитные поля (погрешности от магнитного поля); вибрация и угловые колебания основания (вибрационные погрешности); частотные характеристики акселерометра (частотные погрешности); гистерезис показаний (одна из составляющих нелинейности). [11] Целью данной курсовой работы является проектирование и расчет компенсационного акселерометра. Поставленная цель потребует решение следующих задач: разработка математической модели прибора и ее структурной схемы, анализ устойчивости и параметров системы и необходимости коррекции и синтеза устройства, расчет трансформаторного датчика угла акселерометра и разработка чертежа устройства. Анализ технического задания Необходимо рассчитать и спроектировать компенсационный акселерометр, разработав математическую модель и структурную схему устройства, проведя анализ системы и, при необходимости, синтез системы, а так же произвести расчет дифференциального трансформаторного датчика угла, выбрав материал сердечника и якоря, рассчитав параметры обмоток возбуждения и съёма сигнала, статическую характеристику (зависимость напряжения от угла поворота). Обмотка возбуждения расположена на центральном стержне. Таблица 1 Исходные данные для проектирования
Систему необходимо проверить на устойчивость, соответствие времени переходного процесса, величины перерегулирования, запасам по фазе и амплитуде заданным значениям и провести, при необходимости, синтез системы при помощи введения корректирующего звена. Размеры сердечника: толщина a = 3 мм, высота центрального стержня магнитопровода b = 4 мм, расстояние между стержнями l = 10 мм. Параметры якоря: толщина якоря  наружный радиус якоря наружный радиус якоря  воздушный зазор между якорем и сердечником воздушный зазор между якорем и сердечником  напряжение питания напряжение питания  частота частота  На основе полученных расчетов и данных технического задания необходимо разработать чертеж в одном из доступных графических редакторов, проведя предварительно их анализ и сравнение и обосновав выбор редактора. Патентно-библиографический поиск ЗАДАНИЕ НА ПРОВЕДЕНИЕ ПАТЕНТНОГО И НАУЧНО-ТЕХНИЧЕСКОГО ИССЛЕДОВАНИЯ Тема КР: Компенсационный акселерометр Задачи патентного и научно-технического исследования: обзор и анализ известных решений Исполнитель: Борзов М.С. Краткое содержание работы: выявить аналоги и провести сравнительный анализ функциональных и основных параметров Срок исполнения: 02.06.2022г. Отчетный документ: Справка о патентном исследовании Руководитель КР: ________Кулешов В.В. Задание принял к исполнению 23.03.2022г. Студент: гр. 120291________Борзов М.С. РЕГЛАМЕНТ ПОИСКА Тема КР: Компенсационный акселерометр Начало поиска 1993 г. Окончание 2022 г. Таблица 2.
Справка-отчет о патентно-библиографическом исследовании Таблица 3.
На основе патентно-библиографического поиска исследования акселерометра являются недостаточными, поэтому данная тема курсовой работы, как и разработка устройства и расчет его элементов является актуальной и востребованной в настоящее время в силу стремления усовершенствования прибора и его характеристик, уменьшения его размеров и повышения его чувствительности к внешним возмущениям. Поставленная цель потребует решения следующих задач: разработка математической модели прибора, расчет чувствительного элемента и разработка чертежа. Разработка математической модели прибора Построение структурной схемы начинают с формирования математического описания системы (с использованием законов электро-техники и механики). Построим структурную схему в виде следующей совокупности звеньев:  Рисунок 1. Функциональная схема системы В процессе составления уравнений динамики систему предварительно разбивают на звенья. Затем каждое звено рассматривают отдельно. Входная и выходная величины соответствуют физическим величинам, выражающим воздействие предыдущего звена на данное звено и воздействия данного звена на последующее. На функциональной схеме: ЧЭ – чувствительный элемент в виде массы, ДУ – датчик угла индукционного типа, УС – усилитель, ПР – преобразователь напряжения в ток, ДС – датчик силы. [1] Структурная схема – это изображение САУ в виде совокупности динамических звеньев с указанием связи между ними с определенными типовыми передаточными функциями (ПФ). Под динамическим звеном понимают устройство устройство любой физической природы, описываемое дифференциальным уравнением, не выше второго порядка. Под передаточной функцией звена понимают отношение изображений по Лапласу выходного сигнала ко входному сигналу при нулевых начальных условиях и равных нулю прочих воздействий на звено или систему. [2] Запишем передаточную функцию каждого звена и составим структурную схему: Чувствительный элемент (ЧЭ) описывается уравнением:  Датчик угла (ДУ) описывается коэффициентом  Датчик силы (ДС) имеет уравнение вида:  Усилитель (УС) в цепи обратной связи представляет собой:  Преобразователь напряжения (ПР) описывается уравнением:  С учетом полученных передаточных функций звеньев структурная схема данной САУ будет иметь вид: 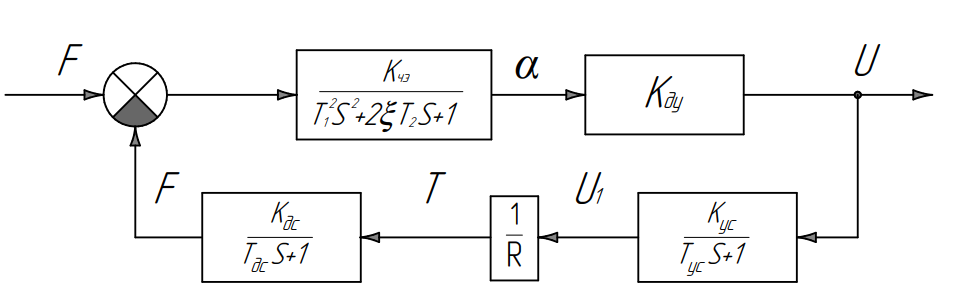 Рисунок 2. Структурная схема системы Датчик момента, преобразователь напряжения и усилитель в цепи обратной связи можно представить, как коэффициент обратной связи  и тогда структурная схема примет вид: и тогда структурная схема примет вид: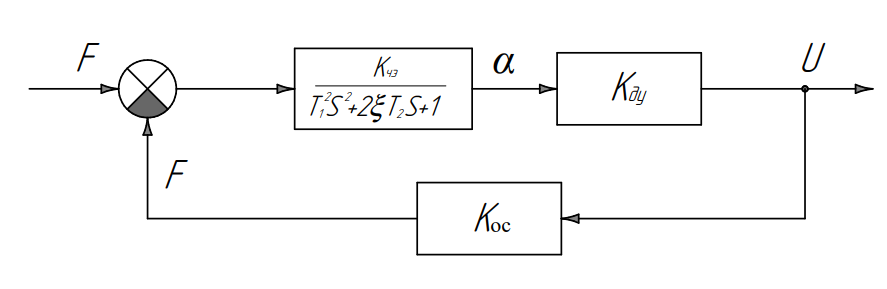 Рисунок 3. Структурная схема системы с коэффициентом обратной связи После составления структурной схемы акселерометра необходимо провести ее анализ в соответствии с заданными параметрами на устойчивость системы и ее соответствии техническому заданию (на величину перерегулирования, время переходного процесса и запасы по фазе и амплитуде). Для этого при помощи программы CLASSIC 3.01 проведем моделирование исходной системы и проверим ее на устойчивость и соответствие параметров заданным значениям в техническом задании. Результаты моделирования представлены ниже, на рис. 4 – 7. 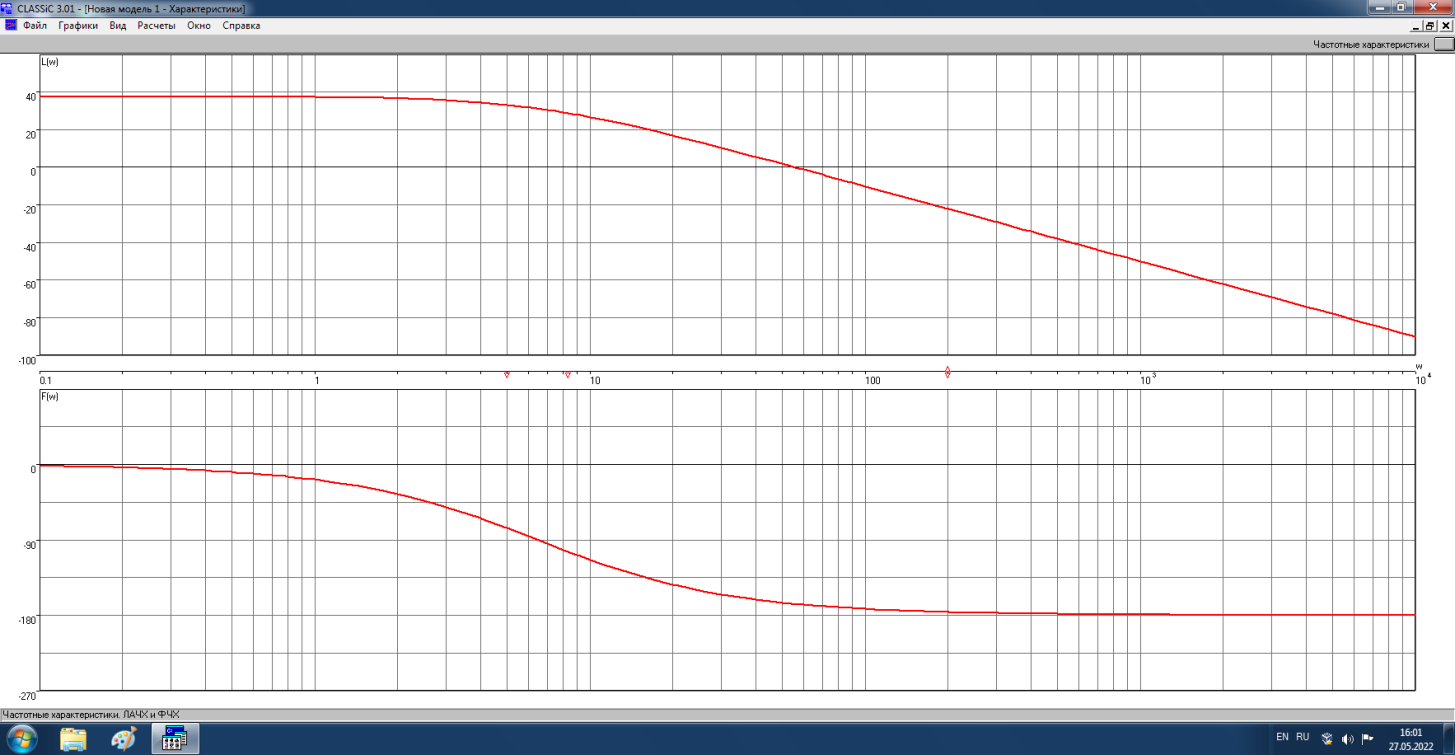 Рисунок 4. ЛАЧХ и ФЧХ разомкнутой исходной системы Исходная система, согласно рис. 4, является устойчивой, так как фазовая частотная характеристика не пересекает отметку  . . Рисунок 5. Показатели частотных характеристик исходной разомкнутой системы Для анализа системы, оценки времени переходного процесса и величины перерегулирования, замкнем систему и посмотрим на переходный процесс и его параметры.  Рисунок 6. Переходный процесс и его параметры исходной замкнутой системы Рассмотрим так же частотные характеристики замкнутой системы: 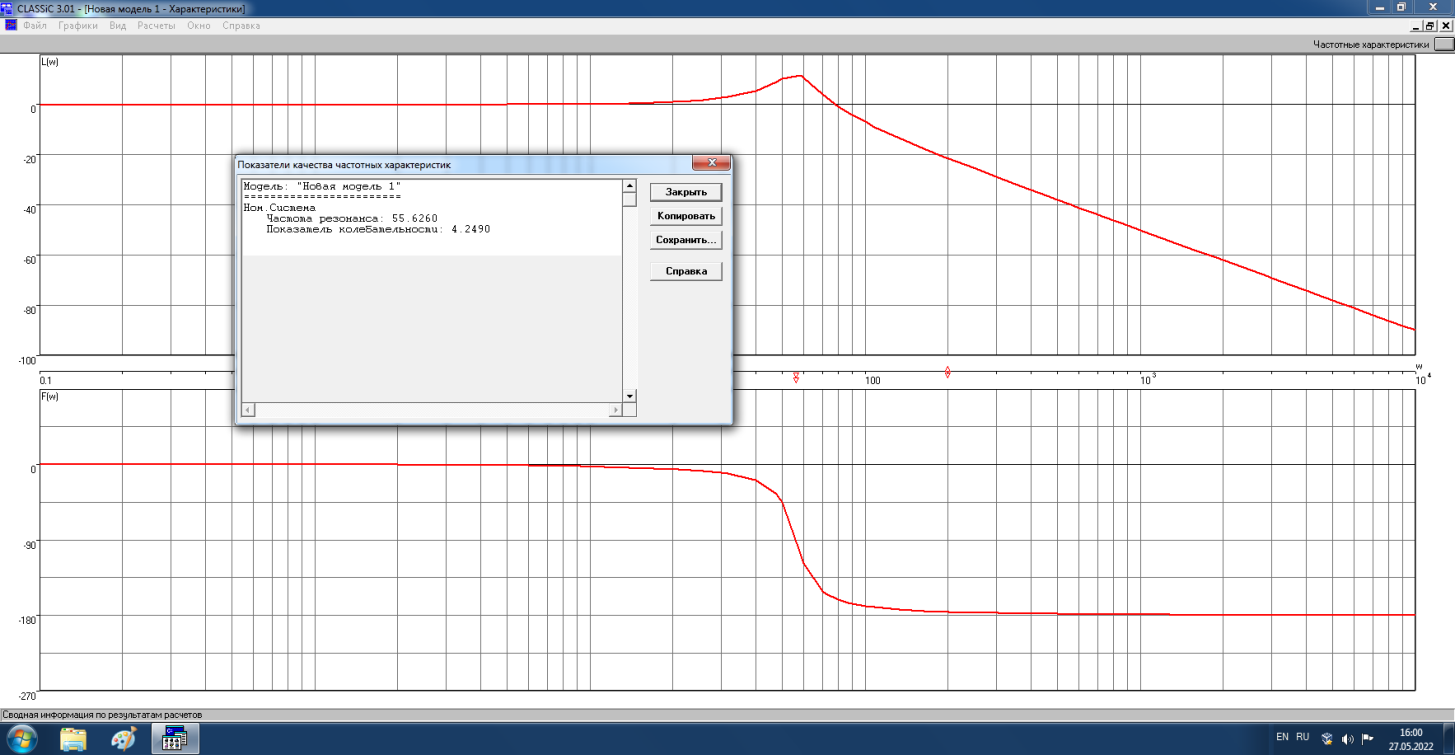 Рисунок 7. Частотные характеристики замкнутой исходной системы и параметры Анализируя параметры переходного процесса, видно, что величина перерегулирования слишком велика, как и время переходного процесса (не соответствуют параметрам ТЗ), а число колебаний больше 3. По виду и параметрам частотных характеристик замкнутой системы можно сказать, что подъём частотной характеристики в точке переходного процесса превышает 3 дБ. На основе анализа параметров исходной системы можно сделать вывод, что для уменьшения подъёма частотной характеристики замкнутой системы и для уменьшения числа колебания, необходимо скорректировать систему путем введения корректирующего звена (интегро-дифференцирующего звена). [1] Интегро-дифференцирующие звенья подавляют усиление в некотором интервале «средних» частот, а вносимый фазовый сдвиг вначале отрицателен, затем с ростом частоты становится нулевым. При дальнейшем росте частоты фазовый сдвиг становится положительным. ЛАФЧХ и электрическая схема пассивного интегро-дифференцирующего звена: 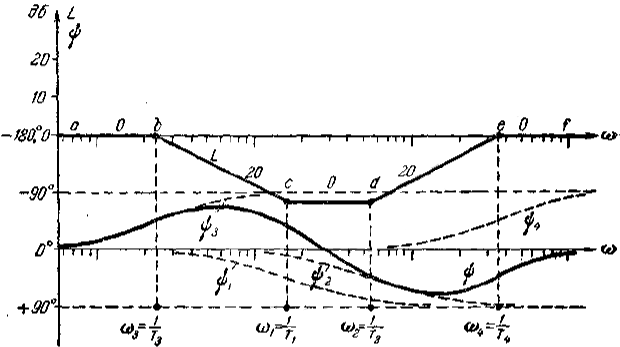  а) б) Рисунок 8. ЛАЧХ (а) и электрическая схема (б) пассивного интегро-дифференцирующего звена Передаточная функция и частотные характеристики пассивного интегрирующего звена:   При этом  в n раз (n=10). Тогда передаточная функция корректирующего звена будет иметь вид: в n раз (n=10). Тогда передаточная функция корректирующего звена будет иметь вид: Произведем в той же среде моделирование скорректированной системы (в которую ввели корректирующее звено) и оценим новые параметры переходного процесса и запасы устойчивости. Структурная схема скорректированной системы показана на рис. 9 , а результаты моделирования – на рис. 10 – 12.  Рисунок 9. Структурная схема скорректированной системы 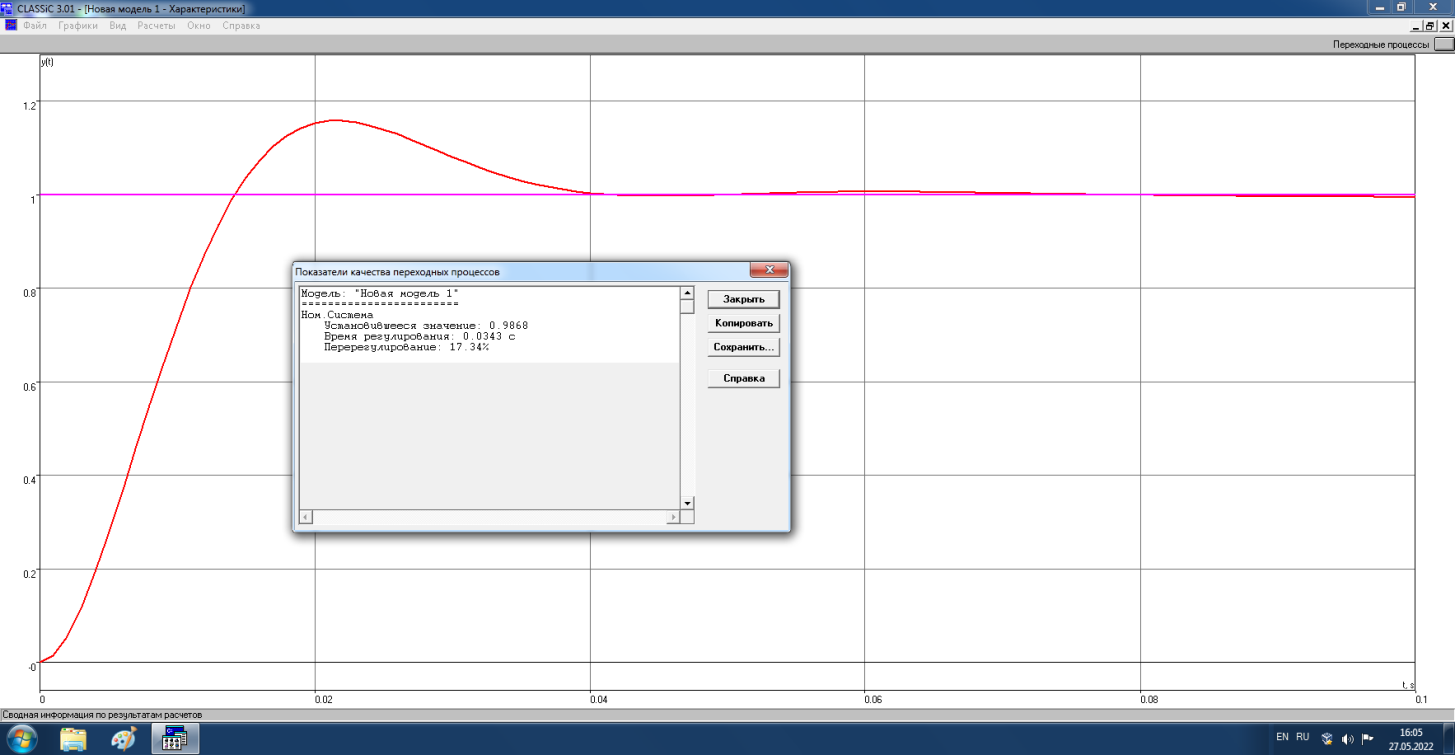 Рисунок 10. Переходный процесс и его параметры скорректированной системы Анализируя переходный процесс и его параметры скорректированной системы видно, что введение корректирующего звена позволило уменьшить время переходного процесса и величину перерегулирования до адекватно-допустимого значения. Необходимо проверить частотные характеристики скорректированной системы на соответствие параметров допустимым значениям. 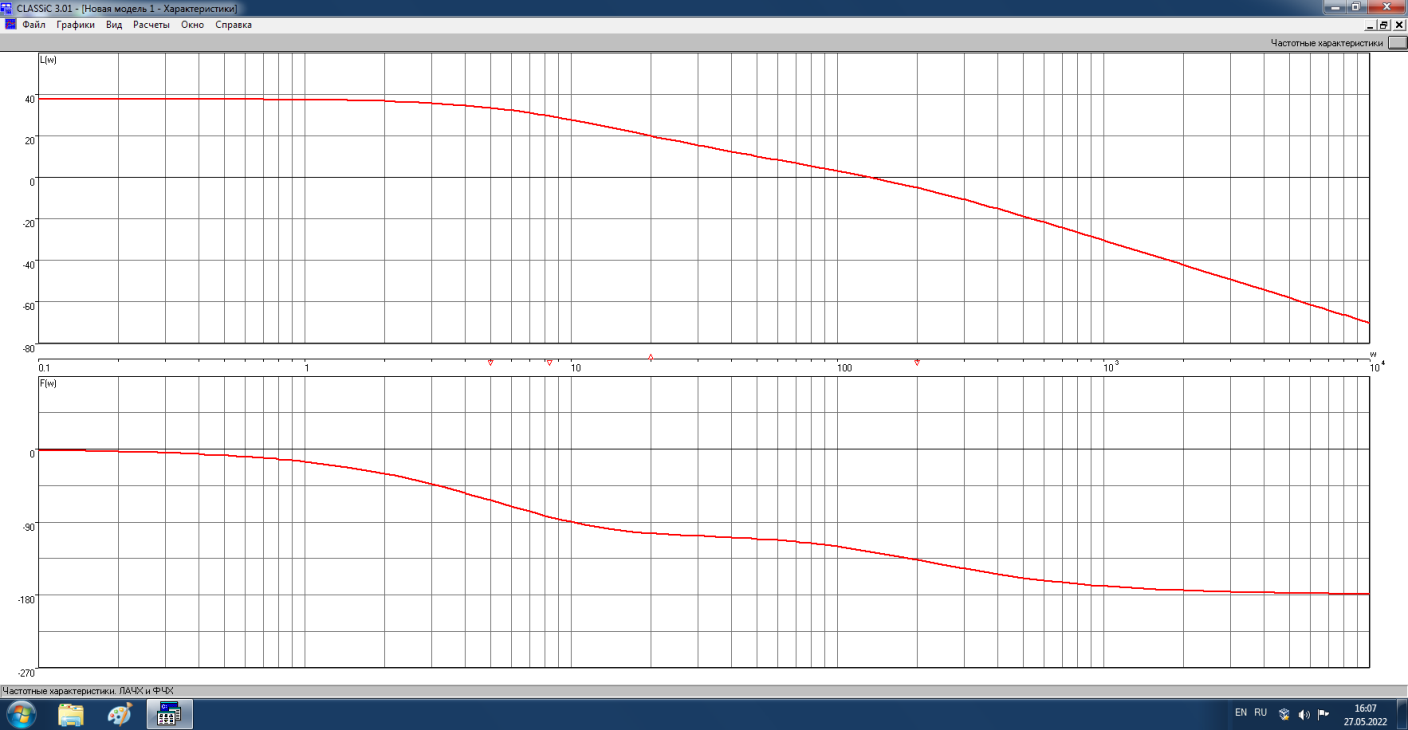 Рисунок 11. ЛАЧХ и ФЧХ скорректированной разомкнутой системы 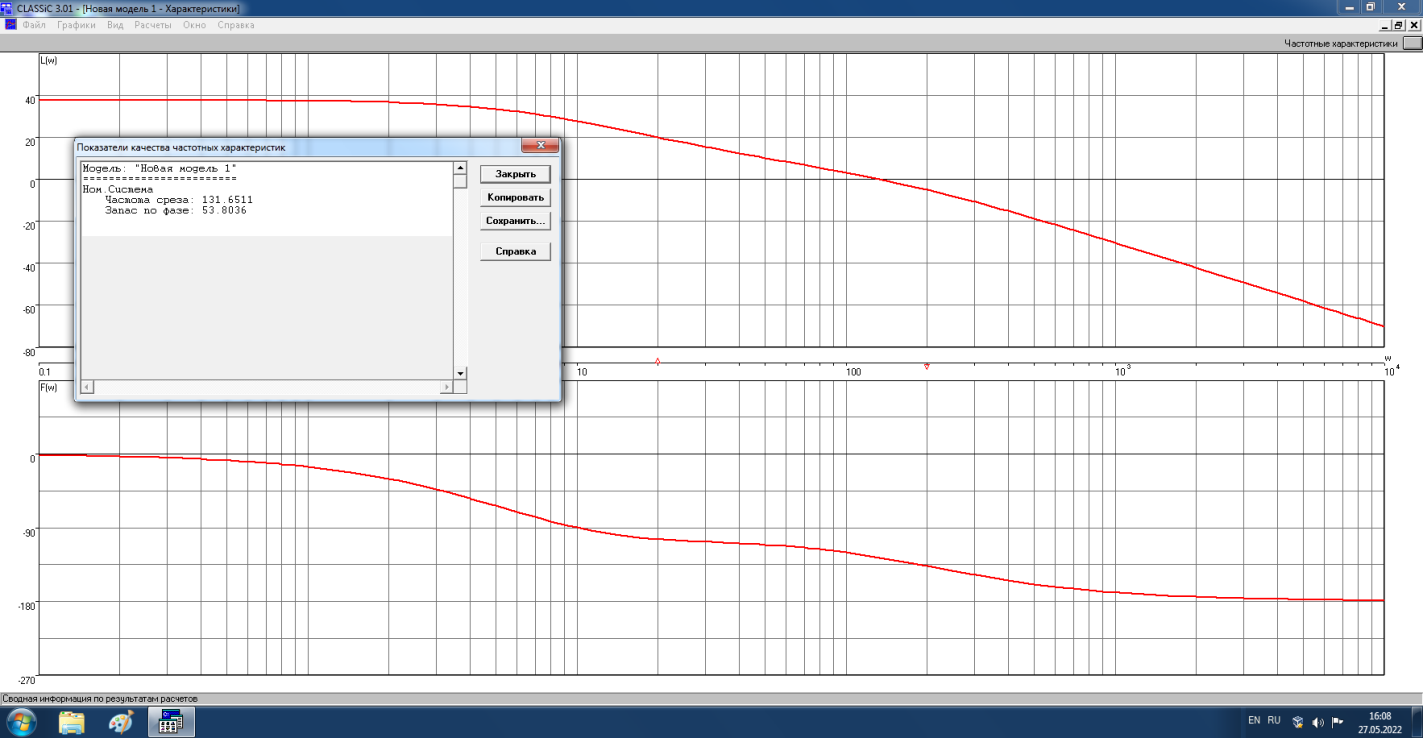 Рисунок 12. Параметры частотных характеристик скорректированной разомкнутой системы Анализируя параметры частотных характеристик скорректированной разомкнутой системы, видно, что запасы по фазе меньше 55  и на основе анализа переходного процесса и его параметров можно сказать, что введение корректирующего устройства было необходимо и позволило получить более устойчивую систему, соответствующую необходимым параметрам ТЗ. [3] и на основе анализа переходного процесса и его параметров можно сказать, что введение корректирующего устройства было необходимо и позволило получить более устойчивую систему, соответствующую необходимым параметрам ТЗ. [3] |







 , минимальная
, минимальная  и максимальная
и максимальная величины которого определяются соотношениями
величины которого определяются соотношениями 
 ,
,  соответственно минимальное и максимальное значения температурного коэффициента магнитной индукции магнита;
соответственно минимальное и максимальное значения температурного коэффициента магнитной индукции магнита;  соответственно минимальное и максимальное значения температурного коэффициента магнитной индукции термокомпенсатора; Dм диаметр магнита; δ
соответственно минимальное и максимальное значения температурного коэффициента магнитной индукции термокомпенсатора; Dм диаметр магнита; δ 
 где hк толщина полоски термокомпенсатора; hм толщина магнита.
где hк толщина полоски термокомпенсатора; hм толщина магнита.