«Расчет и конструирование системы спуска-подъема СПБУ». Курсовая работа По дисциплине Сооружения мнг индустрии Расчет и конструирование системы спускаподъема спбу
 Скачать 0.81 Mb. Скачать 0.81 Mb.
|

1 2 Министерство образования и науки России Федеральное государственное бюджетное учреждение высшего образования. «Санкт-Петербургский Государственный Морской Технический Университет» Кафедра океанотехники и морских технологий Курсовая работа По дисциплине «Сооружения МНГ индустрии» «Расчет и конструирование системы спуска-подъема СПБУ» Выполнил: студент гр. 1320 Русс Р.В Проверил: доцент, к.т.н. Портной А.С. Санкт-Петербург 2018 Содержание
Самоподъемная плавучая буровая установка (СПБУ) — это буровая установка, поднимаемая в рабочем состоянии над поверхностью моря на колоннах, опирающихся на грунт. Колонны подвижны в вертикальном направлении относительно основного корпуса (понтона). Самоподъемные плавучие буровые установки имеют большие корпуса, запас плавучести которых позволяет обеспечить буксировку установки со всем необходимым для производства бурения к месту работы. Процессы буксировки, установки и снятия платформы с точки бурения весьма сложны, 30% аварий установок этого типа произошло при осуществлении именно этих операций. Поэтому буксировку платформ производят обычно при волнении не более 1—2 баллов и ветре до 2—3 баллов. При буксировке опорные колонны находятся в поднятом состоянии. В точке бурения их с помощью домкратов опускают на дно. Колонны упираются в грунт, корпус поднимается на расчетный уровень над поверхностью воды (в зависимости от высоты волн в районе работы платформы). В данной работе мы рассмотрим наиболее ответственный элемент самоподъемных платформ — система спуска и подъема опорных колонн. Различают механическую и гидравлическую системы. Наибольшее распространение получила механическая система, так как она обеспечивает непрерывность подъема и более точную регулировку положения корпуса в горизонтальной плоскости. Скорость подъема установки составляет 0,3—0,4 м/мин, мощность привода 1000—1500 кВт, суммарная нагрузка на подъемное устройство до 88,26 МН (9000 тс).
Плавучие буровые средства классифицируют по способу их установки над скважиной в процессе бурения, разделяя на два основных класса: 1. Опирающиеся при бурении на морское дно (относят плавучие БУ самоподъемного (СПБУ) и погружного (ПУ) типов); 2. Находящиеся при бурении и освоении в плавучем состоянии (полупогружные буровые установки (ППБУ) и буровые суда (БС)). Самоподъемные плавучие буровые установки (СПБУ) применяют преимущественно в разведочном бурении на морских нефтяных и газовых месторождениях в акваториях с глубинами вод 30—120 м.  Общая схема СПБУ. Их различают по конструкции корпуса, числу и конструкции опорных колонн и подъемных устройств. Ha определение числа опорных колонн влияет ряд факторов: глубина моря, гидрометеорологические условия, способ задавливания опорных колонн в грунт и извлечение их из грунта, морское дно, общая масса поднимаемого корпуса, технологичность и трудоемкость изготовления и др. На больших глубинах возрастают волновые нагрузки на каждую колонну. В целях обеспечения прочности на изгиб большой длины колонн требуется увеличение ее поперечного сечения. Поэтому на глубинах более 60 м в установках применяют не более четырех опор со значительным преобладанием установок с тремя опорами и начиная с глубины 90 м используют установки только с тремя опорами. Установки с цилиндрическими опорами применяют на глубинах до 45 м (примерно 65—70%) и в диапазоне глубин 45—75м — установки с цилиндрическими и ферменными опорами, а на глубинах свыше 75м используют установки только с ферменными опорами. Конструкции ферменных опор проектируют прямоугольной, квадратной и треугольной формы. Наиболее удачная конструкция — опора треугольного сечения. Последняя удачно вписывается в треугольную форму корпуса и имеет относительно меньшее число элементов, подверженных воздействию волн. Нижние концы опор заканчиваются башмаками или общей опорной плитой, связывающей опорные колонны между собой.
ОБЩИ Е ПОЛОЖЕНИЯ Требования настоящего раздела распространяются на устройства, предназначенные для подъема и спуска корпуса СПБУ и опорных колонн. Каждая опорная колонна должна об служиваться независимым приводом. Устройство подъема и спуска корпуса СПБУ должно быть устроено таким образом, чтобы единичный отказ любою компонента не приводил бы к бесконтроль ному опусканию корпуса СПБУ. СПЕЦИАЛЬНЫЕ ТРЕБОВАНИЯ
МЕХАНИЗМЫ ПОДЪЕМА И СПУСКА Общие требования к механизмам подъема и спуска корпуса СПБУ.
Система управления, средства связи и сигнализации СПБУ.
ОБЩИЕ ТРЕБОВАНИЯ К УСТРОЙСТВАМ ПОДЪЕМА И СПУСКА Устройства подъема и спуска корпуса СПБУ должны быть способны осуществлять подъем, спуск и поддержание СПБУ в ее рабочем состоянии. Устройства подъема и спуска должны быть выполнены с соответствующим резервиро ванием таким образом, чтобы в случае выхода из строя одного любого компонента (блока, агрега та, электрической и гидравлической системы питания, системы управления), они сохраняли бы способность продолжать подъем, спуск или удержание корпуса СПБУ на прежнем уровне. КОНСТРУКЦИЯ. Устройство подъема и спуска должно быть спроектировано таким образом, чтобы перегрузки его частей, узлов и механизмов при любых операциях с корпусом СПБУ были иск лючены. Это относится, в частности, к следую щим элементам электрического оборудования:
При потере питания механизмов подъема система тормозов должна срабатывать автоматически. УДЕРЖИВАЮЩИЕ УСТРОЙСТВА. Для СПБУ без системы фиксации опор ных колонн расчет удерживающей силы тормозов должен быть выполнен с учетом максимальной нагрузки, определяемой как максимальное усилие (взаимодействие) между колонной и самоподъем ным механизмом в штормовых условиях (макси мальная масса СПБУ плюс соответствующая составляющая воздействия шторма). Статический тормозной момент должен быть принят не менее чем 1,3 максимальной нагрузки, с учетом КПД механической передачи. Для СПБУ с системой фиксации опорных колонн расчет удерживающей силы тормозов дол жен быть выполнен с учетом расчетной нагрузки. Статический тормозной момент должен быть принят не менее чем 1,2 расчетной нагрузки. ЭЛЕКТРОДВИГАТЕЛИ УСТРОЙСТВА ПОДЪЕМА И СПУСКА КОРПУСА СПБУ Мощность электродвигателей привода подъемного устройства подъема и спуска должна выбираться с учетом возможного, в допустимых пределах, неравномерного распределения расчет ной нагрузки корпуса СПБУ, с учетом расчетного допустимого времени подъема корпуса СПБУ, а также с учетом потерь на трение между колоннами и направляющими и КПД редукторной передачи. Характеристики вращающего момента электродвигателей (механические характеристики) должны быть такими, чтобы электродвигатель не был бы способен повредить любую часть (деталь) редукторной передачи или шестеренчатой рамы механизма подъема платформы в случае меха нической блокировки устройства подъема и спуска. СИСТЕМЫ УПРАВЛЕНИЯ И КОНТРОЛЯ Для обеспечения управления подъемом или спуском корпуса СПБУ на постах управления должна быть предусмотрена соответствующая сис тема контроля, которая должна предусматривать аварийно-предупредительную сигнализацию (при отклонениях от допустимых значений) и индика цию, как минимум, следующих параметров:
С целью выравнивания нагрузки между подъемными механизмами опорных колонн раз виваемые моменты электродвигателей должны контролироваться и при необходимости вырав ниваться. Эта процедура должна выполняться после подъема корпуса СПБУ, а также в штор мовых условиях, когда распределение нагрузок на колонны может быть нарушено. Эта процедура не применяется при наличии автоматической сис темы распределения нагрузок. В электроприводах каждой опорной колон ны от одного фидера допускается питание двух или более двигателей. При этом фидер должен иметь установку защиты от коротких замыканий не превышающую 10-кратное значение суммарного тока полной нагрузки совместно включенных двигателей. Контроль нагрузки двигателей, требуе мый 10.5.1, должен быть выполнен трехфазными ваттметрами с центральной шкалой. Установка таких ваттметров допускается не для каждого двигателя, а для фидера, к которому подключено два и более двигателей устройства подъема и спуска. Система снабжения забортной водой должна предусматривать контроль, как мини мум, следующих параметров:
Должен быть предусмотрен автома тический пуск резервного погружного насоса забортной воды при снижении давления воды в системе с подачей сигнала в ЦПУ. Операции подъема и спуска корпуса СПБУ должны осуществляться с ЦПУ устройством подъема и спуска. ЦПУ устройством подъема и спуска должен быть оборудован следующими устройствами и приборами:
Между ЦПУ устройством подъема и спуска и местными постами управления опорными колоннами должна быть предусмотрена (отдельная) система связи.
В плавучих буровых установках самоподъемного типа' подъемное устройство является одним из основных узлов в- конструкции сооружения, посредством которого оно устанав ливается на точку бурения и снимается с нее. При этом подъ емное устройство выполняет следующие операции:
В настоящее время наиболее распространены гидравличе ские и механические подъемники. В гидравлических подъем ных устройствах корпус ПБУ перемещается относительно ко лонн и колонны перемещаются относительно 'корпуса с по мощью силовых гидроцилиндров, взаимодействующих с колон ной посредством траверс с захватными органами. Как видно из рис. 34, гидравлическое подъемное .устройство состоит из трех основных элементов-траверс 1 и 4, захватных, органов (замков) 2 и силовых гидроцилиндров 3. Принцип действия подъемника следующий. Когда подвиж ная траверса 1 замками введена в зацепление с опорной ко лонной, подъемник перемещает колонну относительно корпуса: ПБУ, т. е. совершает рабочий ход. При этом поднимается или опускается корпус либо опорная колонка. Величина рабочего- хода равна шагу рейки опорной колонны. После завершения рабочего хода неподвижная траверса 4 вводится в зацепление с колонной, нагрузка от веса корпуса или опорной колонны переводится на эту траверсу. Подвижная траверса выводится из зацепления с колонной и совершает возвратный ход бед нагрузки — холостой ход. Затем подвижная траверса вновь вводится в зацепление с колонной, на нее переводится нагруз ка, а неподвижная траверса выводится из зацепления с колонной. Рабочий цикл завершен, и подъ емник готов к следующему рабочему ходу. Так как опорная колонна перемеща ется относительно корпуса ПБУ с по мощью подвижной траверсы, последнюю называют «перемещающей», неподвиж ную траверсу называют «перехваткой», потому что она необходима для совер шения перехвата. Гидравлические подъемники выпол няются по различным конструктивным схемам. Наиболее часто встречаются подъемники с кольцевыми траверсами, охватываю щими опорную колонну, и приставные, монтируемые в портале. 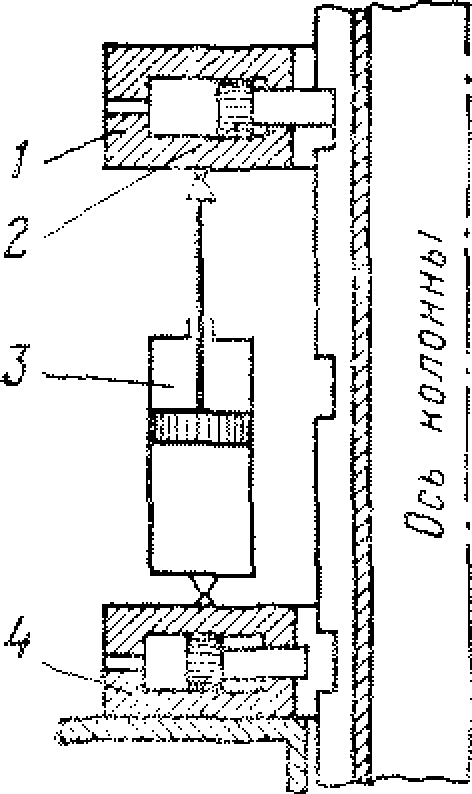 Рис. 1. Принципиальная схема гидравлического подъемного устройства ПБУ Подъемники с кольцевыми траверсами имеют три конст руктивные разновидности: с верхней подвижной траверсой (рис. 2,а), нижней подвижной траверсой (рис. 2,6) и с пла вающими траверсами (рис. 2, в). Первая и вторая конструк ции состоят из подвижной траверсы /, неподвижной траверсы 3 и силовых гидроцилиндров 2. У подъемников с нижней под вижной траверсой неподвижная траверса 3 связана с корпу сом ПБУ порталом 4. Подъемник с плавающими траверсами (рис. 2, в) имеет две траверсы 1 и 3, связанные между собой силовыми гидроцилиндрами 2, Траверсы с гидроцилиндрами расположены внутри портала 4, связанного с корпусом ПБУ. Эти подъемники применяются главным образом в сочета нии с цилиндрическими колоннами, так как в этом случае до стигается более рациональное распределение напряжений в отдельных сечениях траверсы. Подъемник ПБУ «Апшерон» выполнен по схеме а, ПБУ «Азербайджан» по схеме б. Анализируя конструкции и работу гидравлических подъем ников с кольцевыми траверсами, можно отметить, что они имеют общие недостатки, которые заключаются в следующем: сложность изготовления траверс массой более 20 т при относи тельно сложной конфигурации детали; трудоемкость механи ческой обработки; большой объем сварочных работ и необхо димость термообработки; наличие несущего портала б и в (рис. 2), имеющего большую массу и затрудняющего доступ к основным элементам подъемника для выполнения монтаж ных работ и обслуживания во время эксплуатации; потеря времени на холостые ходы. В подъемниках этого типа для обеспечения задавливання опорных колонн двойной нагрузкой грузоподъемность подъем ника должна быть равна половине массы полностью нагружен ного корпуса. Существуют конструкции подъемников, у кото рых перехватывающая группа захватов также подвижна и свя зана с порталом подъемника через силовые гидроцилиндры равной грузоподъемности с гидроцилиндрами перемещающей группы захватов. Ход перехватывающей группы захватов принимается обыч но несколько большим шага рейки опорной колонны. Ход пе ремещающей группы захватов вдвое больше, чем ход перехва тывающей группы. Обычно такие подъемники выполняются в виде приставных и используются в сочетании с четырехгранными опорными ко лоннами пространственной конструкции, например подъемни ки ПБУ «Хазар», «Иль дэ Франс» и др. 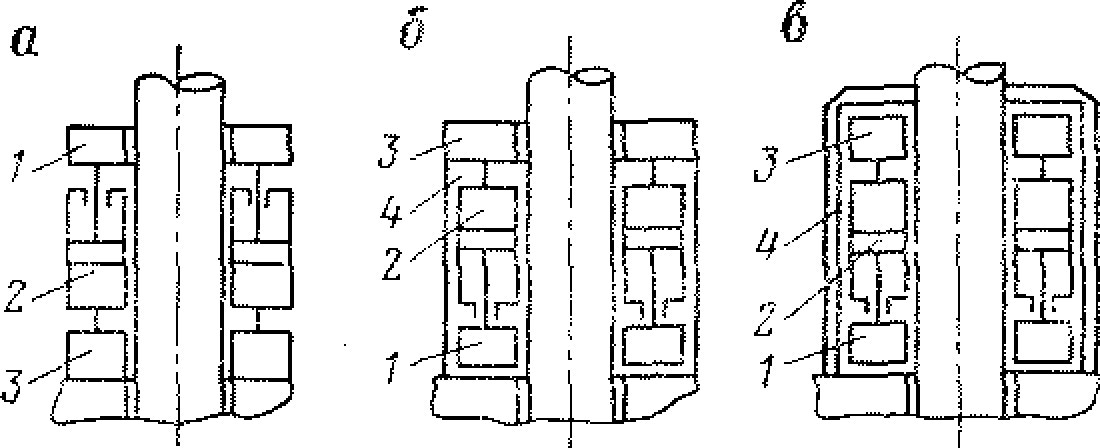 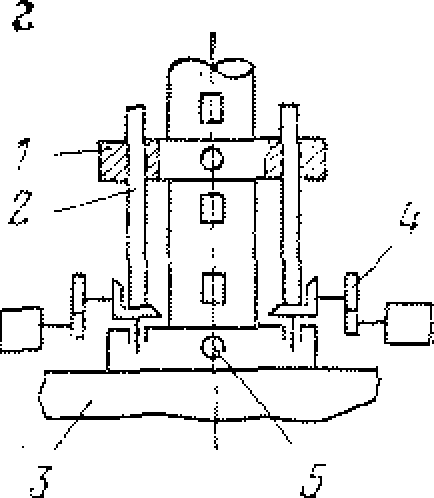 Рис. 2. Подъемники ПБУ с кольцевыми- траверсам л:« a— с верхней подвижной траверсой: б - с нижней подвижеюй траверсой; в— с плавающими траверсами; г —с верхней подвижной траверсой (с байтовым механизмом). В таких подъемниках номинальная грузоподъемность обес печивается при работе одной перемещающей группы захватов,, а максимальная (двойная), необходимая при «задавлнвантга» и «выдергивании» опорных колонн, — одновременной работой обеих групп захватов. В этом случае силовые гидроцилиндры обеих групп соединяются параллельно. Кроме того, наличие регулируемых по высоте перехватывающих захватов позволя ет одновременно совершать рабочий ход и перехват всеми подъемниками ПБУ. Механические подъемники выполняются двух типов: с вин товым механизмом (рис. 2,а) и с зубчатым механизмом пе ремещения опорных колонн. Эксплуатируемые в настоящее время самоподъемные установки с механическим подъемным устройством оснащены в основном подъемниками с зубчатой передачей. Около половины построенных в мире самоподъем ных плавучих буровых установок имеет подъемники с зубча тыми механизмами. Однако несмотря на это только две аме риканские фирмы —«Ле Турно» и «Армко» — располагают технологической оснасткой для изготовления крупномодульных -зубчатых передач — шестерен и реек. Эти фирмы комплектуют ими свои установки и поставляют другим фирмам, строящим ПБУ. Недостатком подъемников этого типа является наличие большого числа двигателей и передаточных механизмов, а также проблема равномерного нагружения приводов. Другим недостатком следует считать сложность технологии производ ства— трудоемкость изготовления реек с большим модулем зуба, изготовляемого с помощью огневой резки без дополни тельной механической обработки. Механические подъемники типа «Ле Турно» или «Армко; позволяют осуществлять непрерывный подъем или спуск без потери времени на холостые ходы, как это происходит в вин товом подъемнике. Механические подъемники удобны в об служивании и просты в эксплуатации. Винтовые подъемники (рис. 2, г) встречаются весьма редко и применяются главным образом в конструкциях малонагруженных ПБУ, используемых для небольших глубин буре ния на малых глубинах моря. Они относятся к типу подъем ников с кольцевыми траверсами и каждый из них состоит из подвижной траверсы /, винтов 2, неподвижной траверсы 3, ме ханизма привода 4 и захватов 5. Работа подъемника анало гична описанной выше работе гидроподъемника, приведенного на рис. 2, а. 1 2 |