диплом ромео. Курсовая работа стратегия и тактика местного гидроакустического поиска объектов промысла по курсу поиск объектов промысла
 Скачать 3.89 Mb. Скачать 3.89 Mb.
|

1.2Основные эксплуатационно–технические характеристики рыболокатора “Сарган–ГМ”Рабочая частота: низкая Ширина диаграммы направленности на уровне –3 дБ на низкой частоте: Коэффициент осевой концентрации антенны на низкой частоте γ = 130. Максимальная мощность излучения антенны на низкой частоте Максимальная длительность зондирующего импульса на низкой частоте τ = 30 Полоса пропускания частот усилительного тракта на низкой частоте при длительности зондирующего сигнала 30 Частота посылок зондирующих импульсов на диапазонах 0 – 1200 Поисковая скорость разворота антенны: 3 скорость обратного хода антенны: Дальность обнаружения косяка рыбы с акустическим поперечным сечением рассеяния 2Теоретическое введение2.1Основные положения теории поиска объектовПоиск объектов промысла в настоящее время ведётся гидроакустическими поисковыми средствами и является случайным процессом, зависящим от многих факторов. Первым из них является сам факт наличия объектов промысла в поисковой зоне. Ранее этой задачей была занята промразведка. На сегодняшний день главными источниками информации являются индивидуальные знания капитана о районе промысла и радиоперехват, что, конечно же, снижает эффективность поиска. Но и наличие объектов в районе поиска не дает полной гарантии обнаружения. На обнаружение объектов промысла влияют вероятности попадания объектов в зону обнаружения, получения энергетического контакта, приёма эхосигналов и отделения их из от помех. Теория поиска объясняет процесс поиска на основе вышеперечисленных вероятностей, используя раздел высшей математики – теорию вероятностей. Судоводитель должен выбирать режимы и параметры работы рыболокатора так, чтобы вероятность попадания объекта в зону эхоконтакта и вероятность облучения объекта зондирующими импульсами были наибольшими, что увеличивает вероятность обнаружения объекта, которая должна быть не меньше заданной. Главная задача теории поиска объектов – разработка способов поиска и повышения эффективности поисковых действий. Выбор оптимального способа поиска производится на основе показателей успешности поисковых действий, или критериев эффективности поиска. Все критерии эффективности поиска подразделяется на две группы: производительные и вероятностные. Производительные критерии – это, например, теоретическая производительность поиска, т.е. площадь, обследуемая в единицу времени, с помощью которой и определяется оптимальная поисковая скорость. Вероятностные критерии – те, которые рассчитаны с помощью теории вероятности. Они позволяют предугадывать результаты поиска. К ним относятся: вероятность обнаружения Основным гидроакустическим средством для поиска пелагической рыбы является рыболокатор горизонтального поиска, который позволяет быстро обследовать значительные площади района поиска. Различают два типа рыболокаторов горизонтального поиска: последовательного и одновременного обзора. Последовательный обзор водного пространства – есть медленный разворот антенны в азимутальной плоскости с одновременным эхозондированием водной среды по направлениям разворота антенны. По характеру разворота антенны в последовательном обзоре разделяют три вида обзора: обзор на оба борта, на один борт, обзор к носу. В отечественной промышленности используется последовательный обзор на один борт. При таком обзоре антенна медленно разворачивается на один борт, а затем быстро возвращается в исходную позицию. По эффективности из всех видов последовательного обзора он на втором месте, после обзора к носу. Схемы обзоров представлены на рисунке 2.1. При подготовке к ведению поиска объектов промысла рыболокатором следует определиться со способом перемещения судна по району. Из теории поиска объектов известно, что среднеожидаемое время обнаружения малоподвижных объектов намного меньше при планомерном галсировании с целью одноразового просмотра объёма для обнаружения объектов. Построение схемы такого галсирования базируется на выводах теории поиска объектов промысла. 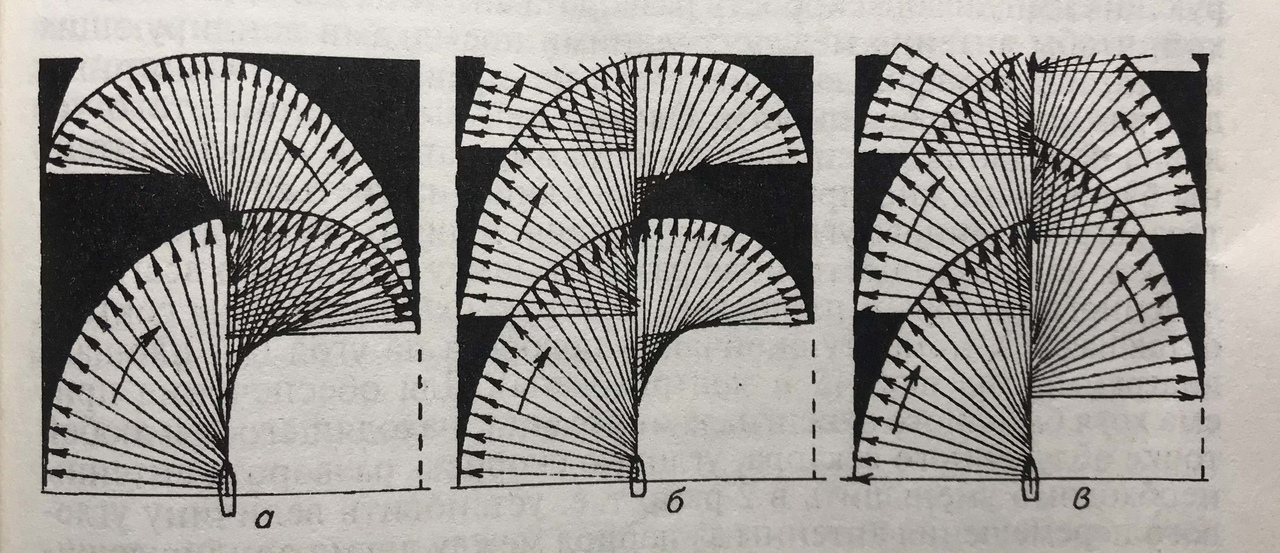 Рисунок 2.1 – Способы последовательного обзора: а – обзор на оба борта; б – обзор на один борт, в – обзор к носу (необлучаемые зоны затушеваны) 2.2Расчётные соотношения по стратегии и тактике местного гидроакустического поиска объектов промысла применительно к рыболокаторам последовательного обзора на один борт. Обоснование стратегии и планирование поисковых работ Разработка сетки поисковых галсов или стратегия поисковых работ производится на основе следующего. Из теории поиска объектов следует, что поиск малоподвижных и не уклоняющихся от обнаружения объектов, к которым относятся объекты промысла, следует осуществлять упорядоченным галсированием по району с целью одноразового просмотра возможных мест нахождения объектов, так как среднеожидаемое время обнаружения объектов в два раза меньше при планомерном поиске, чем при хаотичном. Для этого решается задача выбора межгалсовых расстояний. Если рыболокатор при движении судна обеспечивает поиском полосу шириной
где Для вероятности пересечения 95% и интервала пересечения, равного
Сетку галсов необходимо планировать в виде параллельных прямых. Начало галсирования определяется исходной позицией судна: Сетку галсов наносят на планшет, вычерченный в масштабе 1:50000. Сетку параллелей и меридианов на планшете наносят с дискретом в 2.5 км. В реальной ситуации существует масса рекомендаций по выбору схем поисковых галсов (рисунок 2.2). Например, так как объекты промысла в своей жизнедеятельности придерживаются определенных температур, то поисковые галсы целесообразно располагать перпендикулярно изотермам. Поисковые галсы следует стараться располагать так, чтобы они пересекали струи возможных течений, зоны свалов глубин, общее направление изобат. Следует также учитывать гидрометеорологическую обстановку. При планировании поисковых галсов обязательно надо учитывать особенности распределения и поведения объектов промысла в разные периоды их жизненного цикла. Так, при работе на зимующих скоплениях особое внимание надо уделять акватории с оптимальными температурами для данного вида рыб. В период нагула поисковые галсы следует намечать там, где более богата кормовая база. Скопления донных рыб часто вытянуты вдоль изобат, поэтому поисковые галсы также целесообразно располагать с расчетом пересечения ими изобат. Немаловажное значение для поиска пелагической рыбы имеет учет местных признаков наличия рыбы. Днем – это всплески на поверхности воды, характерная рябь, темно–бурые пятна, наблюдаемые визуально, ночью – это свечение воды. 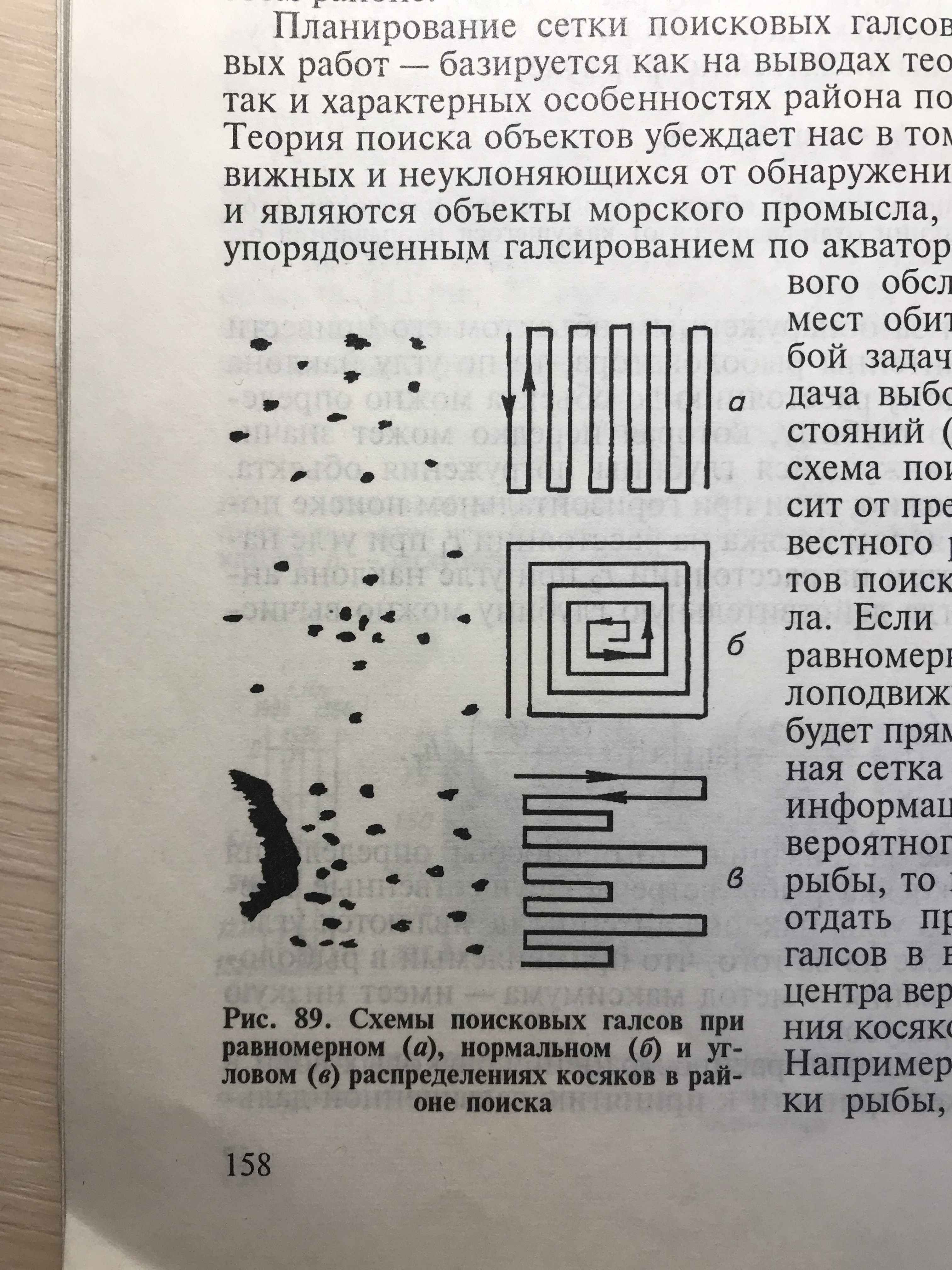 Рисунок 2.2 – Схемы поисковых галсов при равномерном (а), нормальном (б) и угловом (в) распределениях косяков в районе поиска В нашей ситуации, учитывая особенности программного обеспечения, то есть косяки неподвижны и их распределение равновероятно по всей акватории, задача становится проще. Выбор определяется лишь начальным местоположением судна, известным из начальных условий. В данном случае началом координат является угол планшета, значит, схема поисковых галсов – прямолинейная равномерная сетка. |