СИИС курсовая. КР СИИС ПРИМЕР ОФОРМЛЕНИЯ. Курсовая работа "Судовая система аварийнопредупредительной сигнализации" по дисциплине "Судовые информационноизмерительные системы"
 Скачать 1.38 Mb. Скачать 1.38 Mb.
|

| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Наименование параметра | Диапазон измерения и контроля | Тип датчика | Выходной сигнал датчика/преобразователя | количество |
| Температура выпускных газов | 0…600оС | Термопара типа J | термоЭДС | 9 |
| Температура охлаждающей воды на выходе из цилиндров | 0…200оС | Терморезистор типа Ni 120 | Сопротивление, ток 4…20 мА | 9 |
| Температура охлаждающего масла на выходе из поршней | 0…100оС | Терморезистор типа Ni 120 | Сопротивление, ток 4…20 мА | 9 |
| Температура подшипников | 0…100оС | Термопара типа K | Сопротивление, термоЭДС, ток 4…20 мА | 9 |
| Частота вращения ГТН | 0…20000 1/мин | индукционный | импульсы | 1 |
4.6 Другие исходные данные и требования - в соответствии с методическими указаниями.
Задание принял к исполнению: Ивинов И.И.
Руководитель проектирования Самойленко А.Ю.
“ ” 2019 г.
Основные требования к системе аварийно-предупредительной сигнализации (АПС)
Система АПС (англ. – Alarm & MonitoringSystem) является информационно-измерительной системой, предназначенной для автоматического дистанционного сбора информации о работе энергетического оборудования, ее централизованной обработки и представления человеку.
Система аварийно-предупредительной сигнализации должна:
обеспечивать подачу звукового сигнала в центральном или местном посту управления главными механизмами и визуальную индикацию каждого сигнала в соответствующем месте;
быть связана с общественными помещениями механиков, а также с каждой из кают механиков через селекторный переключатель, обеспечивающий связь по меньшей мере с одной из этих кают. Администрация может разрешить равноценные устройства;
при возникновении любой ситуации, требующей действий или внимания вахтенного помощника, приводить в действие звуковую и световую аварийно-предупредительную сигнализацию на ходовом мостике;
насколько это практически возможно должна быть спроектирована таким образом, чтобы при отказе отдельных элементов обеспечивалась безопасность контролируемой установки;
приводить в действие сигнализацию вызова механиков, требуемую правилом II-1/38, если аварийно-предупредительный сигнал не привлек внимания в месте его подачи в течение определенного периода времени.
Система аварийно-предупредительной сигнализации должна непрерывно обеспечиваться питанием с автоматическим переключением на резервный источник в случае прекращения нормального питания.
Должна быть предусмотрена подача аварийно-предупредительного сигнала, указывающего на прекращение нормального питания системы аварийно-предупредительной сигнализации.
Система аварийно-предупредительной сигнализации должна обеспечивать одновременное указание более чем одной неисправности, причем принятие одного сигнала не должно препятствовать принятию другого.
Принятие на посту любого аварийно-предупредительного сигнала должно указываться в местах его визуальной индикации. Аварийно-предупредительные сигналы должны подаваться до тех пор, пока они не будут приняты, а визуальная индикация каждого отдельного сигнала должна сохраняться до устранения неисправности, после чего система аварийно-предупредительной сигнализации должна автоматически переходить на нормальный режим работы.
Различают системы с индивидуальными сигналами для каждого механизма или для групп механизмов, последние называются централизованными. Централизованные системы, как правило, применяют для главных двигателей, дизель-генераторов, судовых систем, а также вспомогательных механизмов.
Таким образом, система аварийно-предупредительной сигнализации обеспечивает в рулевой рубке на пульте обобщенную аварийно-предупредительную сигнализацию о неисправности технических средств. Система аварийно-предупредительной сигнализации обеспечивает представление сигналов (в виде мнемосхемы в рулевой рубке и МО) по всем контролируемым параметрам энергетической установки, электроэнергетической установки, вспомогательных механизмов, общесудовых систем и устройств. В каютах всех механиков, канцелярии и столовой предусматриваются панели обобщенной аварийно-предупредительной сигнализации.
Общая характеристика серии аппаратных средств, использованных для комплектации системы АПС
АПС состоит из трех уровней:
Уровень датчиков;
Уровень контроллеров;
Уровень панелей оператора.
Системы АПС современных морских судов создаются на базе микропроцессорных блоков. Каждый из них и система в целом характеризуется двумя компонентами – аппаратным и программным. В настоящей работе решается задача разработки аппаратной части системы АПС. Она решается путем использования промышленно выпускаемых микропроцессорных модулей для систем удаленного ввода/вывода. Наборы таких модулей выпускаются как зарубежными, так и отечественными фирмами. Это модули серии ADAM 4000 фирмы Advantech, серии I 7000 фирмы ICP DAS, серии NL отечественной фирмы RLDA [3…5].
В данной работе для создания системы АПС используются модули серии NL, которые являются интеллектуальными компонентами распределенной системы сбора данных и управления. Они обеспечивают аналого-цифровое, цифро-аналоговое преобразование информации и ввод-вывод дискретных сигналов, счет импульсов, измерение частоты, преобразование интерфейсов и другие функции, необходимые для построения эффективных систем управления производственными процессами в жестких условиях эксплуатации. Модули соединяются между собой, а также с управляющим компьютером или контроллером с помощью промышленной сети. Основным назначением модулей NL-8TI является усиление, преобразование в цифровой код и ввод в управляющий компьютер или контроллер измеренных значений температуры, тока или напряжения, поступающего от устройств нормализации сигналов или непосредственно от разнообразных датчиков на основе интерфейса RS-485. Согласно задания на курсовую работу, в компьютере используется порт RS-232. Для подключения модуля к этому компьютеру необходим преобразователь интерфейса RS-232 в RS-485 (NL-232C, NL-485C, NL-422C - конвертеры интерфейсов).
Все модули серии NL программно и аппаратно совместимы с модулями аналогичного назначения ADAM, ICPDAS, NuDAM и др., однако отличаются количеством и качеством защиты от небрежного использования и аварийных режимов работы системы (11 видов защиты), диапазоном рабочих температур, модули NL-8AI и NL-8TI позволяют устанавливать для каждого канала свой диапазон измерений или тип датчиков.
Модуль может быть использован для удаленного сбора данных, диспетчерского управления, в системах безопасности, для лабораторной автоматизации, автоматизации зданий, тестирования продукции. Примерами может быть применение модулей для решения следующих задач: автоматическое управление исполнительными механизмами (печами, электродвигателями, клапанами, задвижками, фрамугами и т.п.) с обратной связью и без; управление освещением, кондиционированием воздуха, котельными, тепловыми пунктами и т.п.; контроль и регистрация температуры в теплицах, элеваторах, печах для закалки стали, испытательных камерах тепла и холода, в различных технологических процессах; стабилизация температуры в термостатах, термошкафах, котлах; автоматизация стендов для приемо-сдаточных и других испытаний продукции, для диагностики неисправностей при ремонте, для автоматизированной генерации паспортных данных неидентичной продукции.
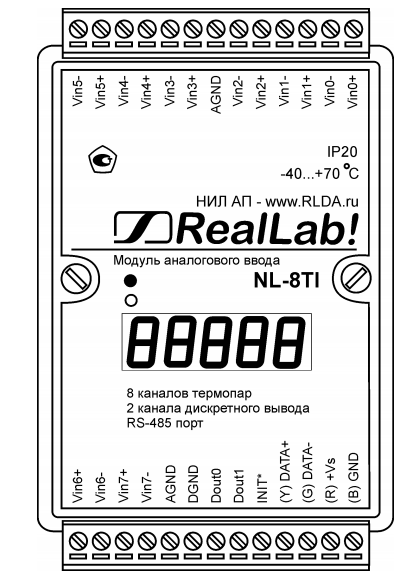
М
Рисунок 1. Вид сверху
на модуль
NL-8TI
одуль состоит из основания, печатной платы и крышки, которая прикрепляется к основанию двумя винтами, и съемных клеммных колодок. Крышка не предназначена для съема потребителем. Съемные клеммные колодки позволяют выполнить быструю замену модуля без отсоединения подведенных к нему проводов. Для отсоединения клеммной колодки нужно силой вытащить колодку из ответной части, остающейся в модуле. Корпус выполнен из ударопрочного полистирола методом литья под давлением. В
 нутри корпуса находится печатная плата. Монтаж платы выполнен по технологии монтажа на поверхность. Для крепления на DIN-рейке используют пружинящую защелку, которую оттягивают в сторону от корпуса с помощью отвертки, затем надевают корпус на 35-мм DIN-рейку и защелку отпускают. Для крепления к стене можно использовать отрезок ДИН-рейки, которая закрепляется двумя шурупами на стене, затем не ней закрепляется модуль с помощью его защелки. Модули можно также крепить один сверху другого.
нутри корпуса находится печатная плата. Монтаж платы выполнен по технологии монтажа на поверхность. Для крепления на DIN-рейке используют пружинящую защелку, которую оттягивают в сторону от корпуса с помощью отвертки, затем надевают корпус на 35-мм DIN-рейку и защелку отпускают. Для крепления к стене можно использовать отрезок ДИН-рейки, которая закрепляется двумя шурупами на стене, затем не ней закрепляется модуль с помощью его защелки. Модули можно также крепить один сверху другого. Удобной особенностью сети на основе стандарта RS-485 является возможность отключения любого ведомого устройства без нарушения работы всей сети. Это позволяет делать "горячую" замену неисправных устройств.
Применение модулей серии NL в промышленной сети на основе интерфейса RS-485 позволяет расположить модули в непосредственной близости к контролируемому оборудованию и таким образом уменьшить общую длину проводов и величину паразитных наводок на входные цепи.
Структурная схема системы АПС
Рисунок 2. Структурная схема системы АПС
Для контроля температуры выпускных газов и температуры подшипников с помощью термопар J и K типа соответственно используем модули NL-8TI. Термопара является нелинейным преобразователем температуры в напряжение. Для компенсации нелинейности в модулях NL-8TI используется поправочная таблица, взятая из ГОСТ Р 8.585 для термопар типа K, J, B, L, E, S, R, N, T и занесенная в ЭППЗУ модуля. Микроконтроллер, имеющийся в модуле, вносит поправки в результат измерения, пользуясь этой таблицей. Поэтому модуль выдает через порт RS-485 значение, пропорциональное температуре. Напряжение на зажимах термопары зависит не от абсолютного значения температуры, а от разности температур горячего и холодного спая. Температура холодного спая в модуле измеряется линейным полупроводниковым датчиком температуры, а погрешность, вносимая ненулевой температурой холодного спая, компенсируется программно, в контроллере модуля. NL-8TI имеет 8 каналов ввода сигналов термопар , 2 дискретных выхода, так что нам будет достаточно использование 2 модулей.
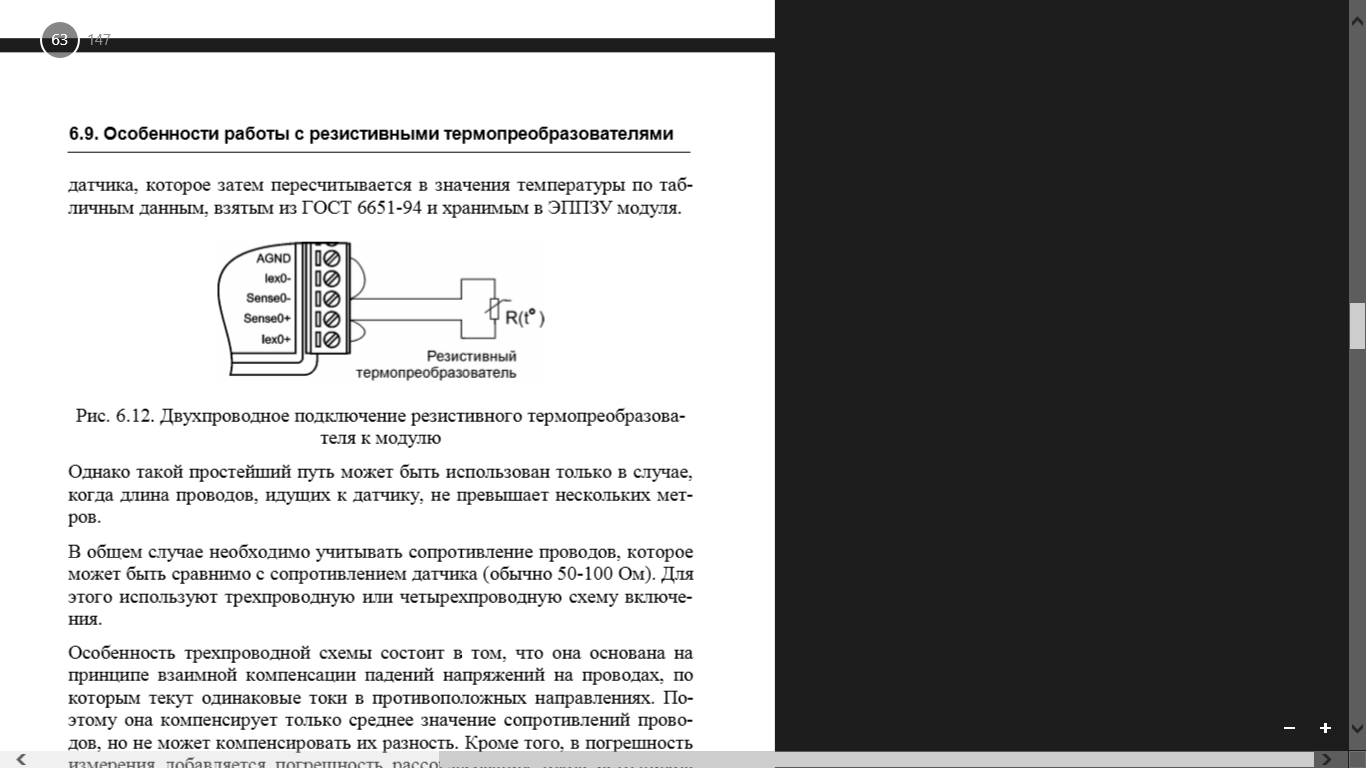
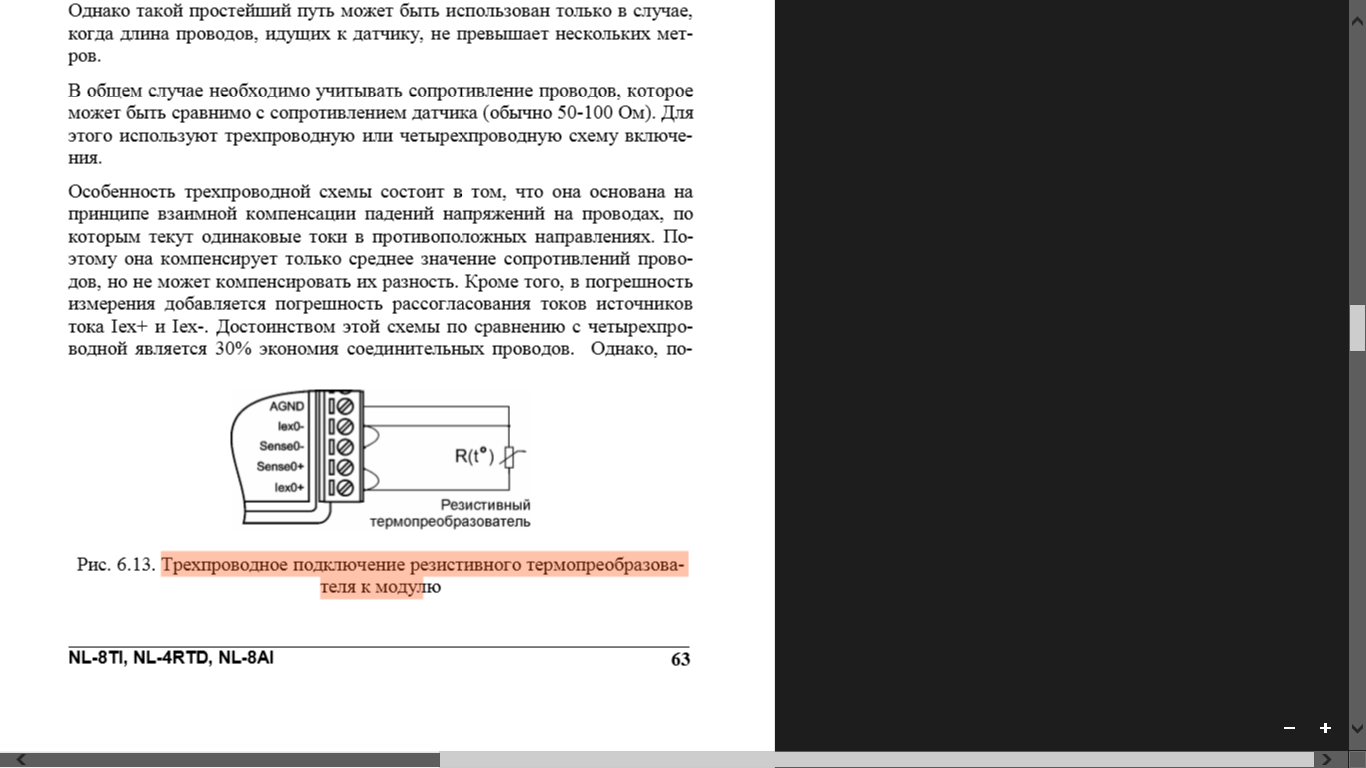
Для контроля температуры охлаждающей воды на выходе из цилиндров и температуры охлаждающего масла на выходе из поршней, используя терморезистор типа Ni120 используем модули NL-4RTD. Для измерения сопротивления из модуля в термопреобразователь задают ток с помощью "идеальных" источников тока Iex+ и Iex- и снимают величину падения напряжения на датчике с помощью потенциальных входов модуля Sense+ и Sense-. При фиксированном токе падение напряжения прямо пропорционально сопротивлению датчика, которое затем пересчитывается в значения температуры по табличным данным, взятым из ГОСТ 6651-94 и хранимым в ЭППЗУ модуля. Однако такой простейший путь может быть использован только в случае, когда длина проводов, идущих к датчику, не превышает нескольких метров. В общем случае необходимо учитывать сопротивление проводов, которое может быть сравнимо с сопротивлением датчика (обычно 50-100 Ом). Для этого используют трехпроводную или четырехпроводную схему включения. Особенность трехпроводной схемы состоит в том, что она основана на принципе взаимной компенсации падений напряжений на проводах, по которым текут одинаковые токи в противоположных направлениях. Поэтому она компенсирует только среднее значение сопротивлений проводов, но не может компенсировать их разность. Кроме того, в погрешность измерения добавляется погрешность рассогласования токов источников тока Iex+ и Iex-. Достоинством этой схемы по сравнению с четырехпроводной является 30% экономия соединительных проводов. Поскольку модуль NL-4RTD имеет 6 генераторов тока, к нему можно подключить только 3 датчика по такой схеме. Четырехпроводная схема использует только один источник тока. Поэтому исключается погрешность рассогласования токов Iex0+ и Iex0-. Четырехпроводная схема не использует принцип компенсации сопротивлений и поэтому позволяет исключить влияние проводов независимо от величины рассогласования их сопротивлений. Для этого напряжение измеряется непосредственно на выводах датчика. Эта схема измерения является наиболее точной. Она позволяет подключить 4 датчика. Таким образом, используем 3 модуля NL-4RTD для контроля вышеприведенных параметров с помощью терморезисторов.
Еще один контролируемый параметр – частота вращения газо-турбонагнетателя. Для приема и обработки выходного импульса индукционного датчика используем один модуль NL-2C. Он имеет два изолированных входа для подключения источников импульсных сигналов. Каждый из входов имеет вход разрешения счета (Gate), однако он может быть отключен программно, поэтому входы разрешения можно никуда не подключать, если в этом нет необходимости.
Перечень модулей ввода
| Наименование параметра | Модуль | Диапазон измерения и контроля | Тип датчика | Выходной сигнал датчика/преобразователя | количество |
| Температура выпускных газов | NL-8TI | 0…600оС | Термопара типа J | термоЭДС | 2 |
| Температура охлаждающей воды на выходе из цилиндров | NL-4RTD | 0…200оС | Терморезистор типа Ni 120 | Сопротивление, ток 4…20 мА | 3 |
| Температура охлаждающего масла на выходе из поршней | NL-4RTD | 0…100оС | Терморезистор типа Ni 120 | Сопротивление, ток 4…20 мА | 3 |
| Температура подшипников | NL-8TI | 0…100оС | Термопара типа K | Сопротивление, термоЭДС, ток 4…20 мА | 2 |
| Частота вращения ГТН | NL-2C | 0…20000 1/мин | индукционный | импульсы | 1 |
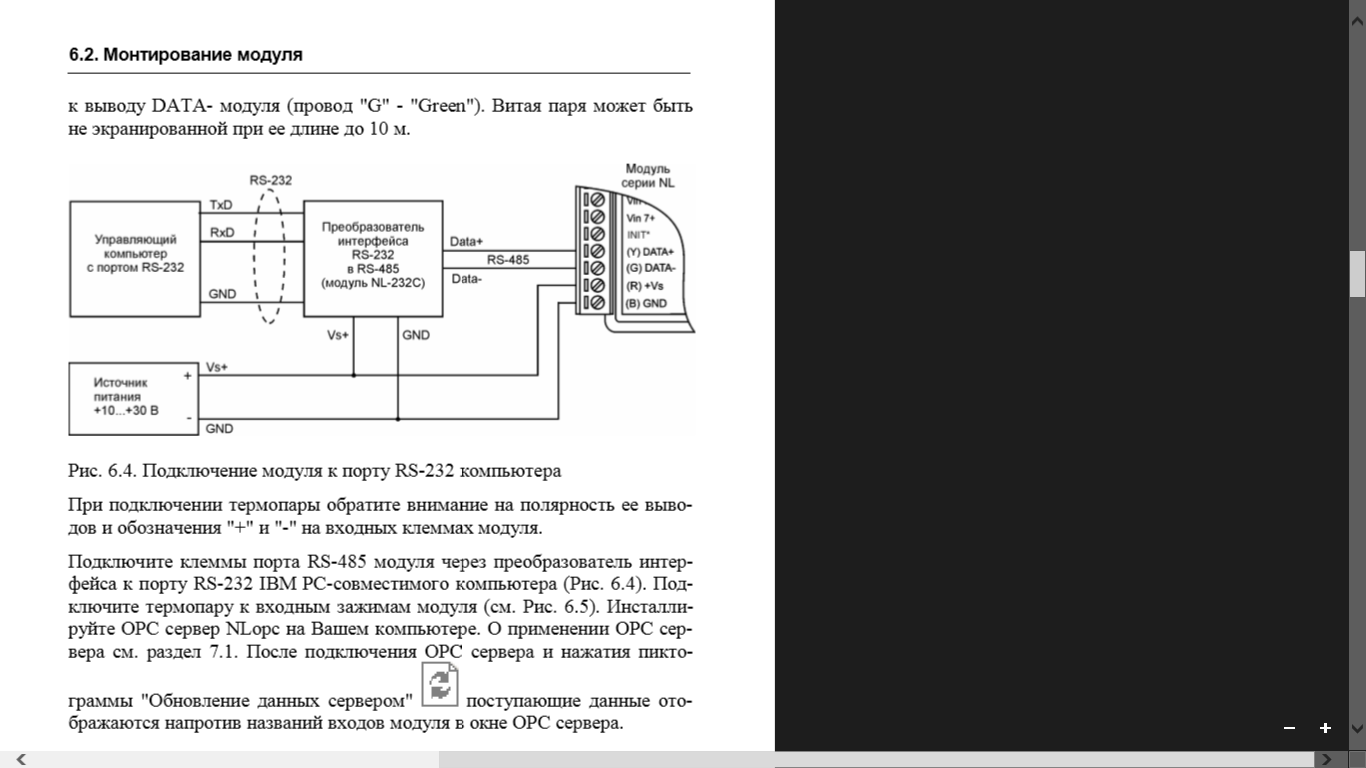
Рисунок 3. Схема подключения преобразователя интерфейсов
Согласно исходным данным используемый компьютер имеет порт RS-232. Для использования модулей серии NL необходим порт компьютера RS-485. Для решения этой проблемы применяем преобразователь интерфейса, схема подключения которого показана на рисунке.
Основным назначением модулей NL-8TI и NL-4RTD является усиление, преобразование в цифровой код и ввод в управляющий компьютер или контроллер измеренных значений температуры, тока или напряжения, поступающего от устройств нормализации сигналов или непосредственно от разнообразных датчиков. Для работы с токовыми сигналами параллельно входам модуля подключают прецизионный резистор сопротивлением 125 Ом.
Применение АЦП, специально спроектированных для работы с термопарами и резистивными преобразователями, позволило реализовать процедуру автоматического тестирования обрыва датчика без применения дополнительных микросхем.
Р
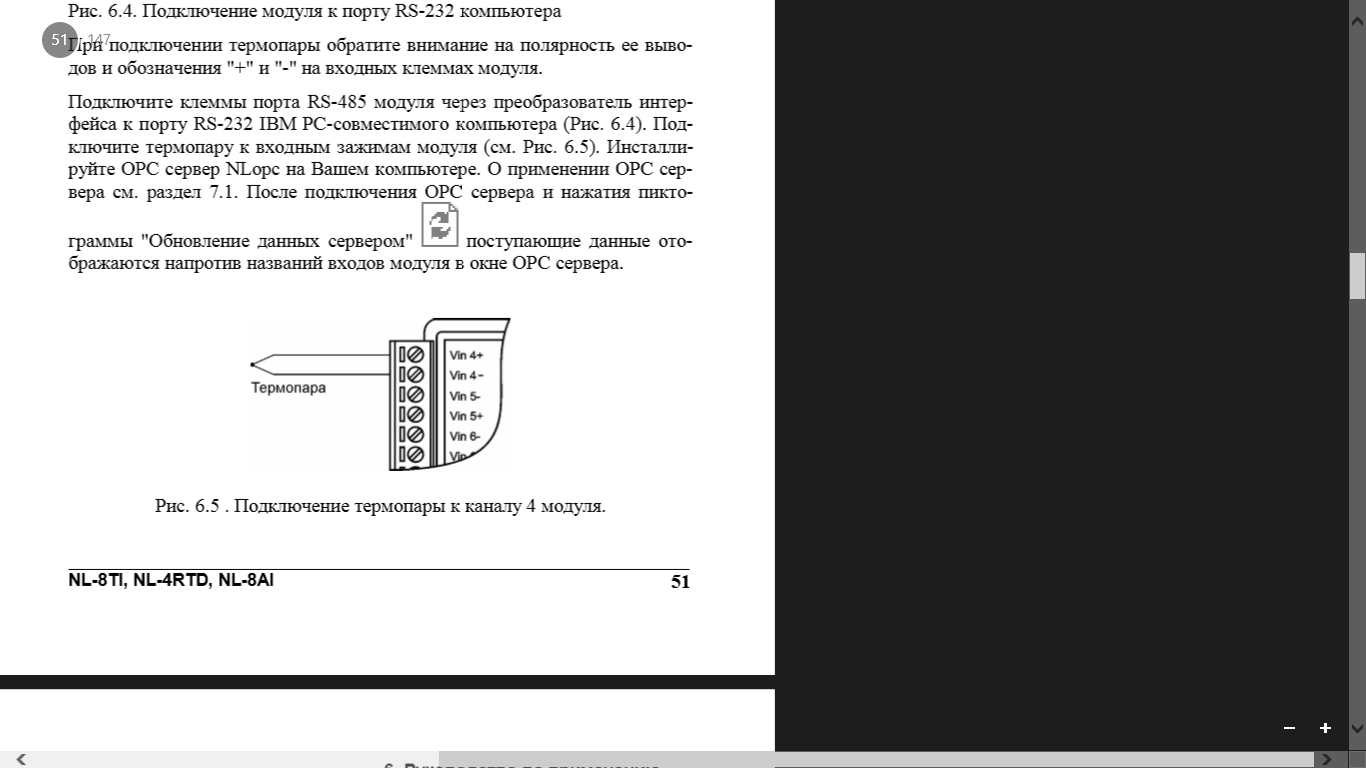 исунок 4. Схема подключения термопары
исунок 4. Схема подключения термопарыДля контроля температуры выпускных газов и температуры подшипников с помощью термопар J и K типа соответственно используем модули NL-8TI. Принцип работы описан в предыдущем разделе. При подключении термопары необходимо обратить внимание на полярность ее выводов и обозначения "+" и "-" на входных клеммах модуля.
Д
ля ввода данных с терморезисторов типа Ni120 применяем модули NL-4RTD. Принцип работы и устройство также описаны в предыдущем разделе.
Рисунок 5.Двухпроводная схема подключения терморезистора
П
одключение терморезисторов возможно двумя способами: с двухпроводным и трехпроводным подключениями. Наиболее точными измерения получаются, применяя четырехпроводное подключение терморезистора к модулю.
Рисунок 6. Трехпроводное подкдючение терморезистора
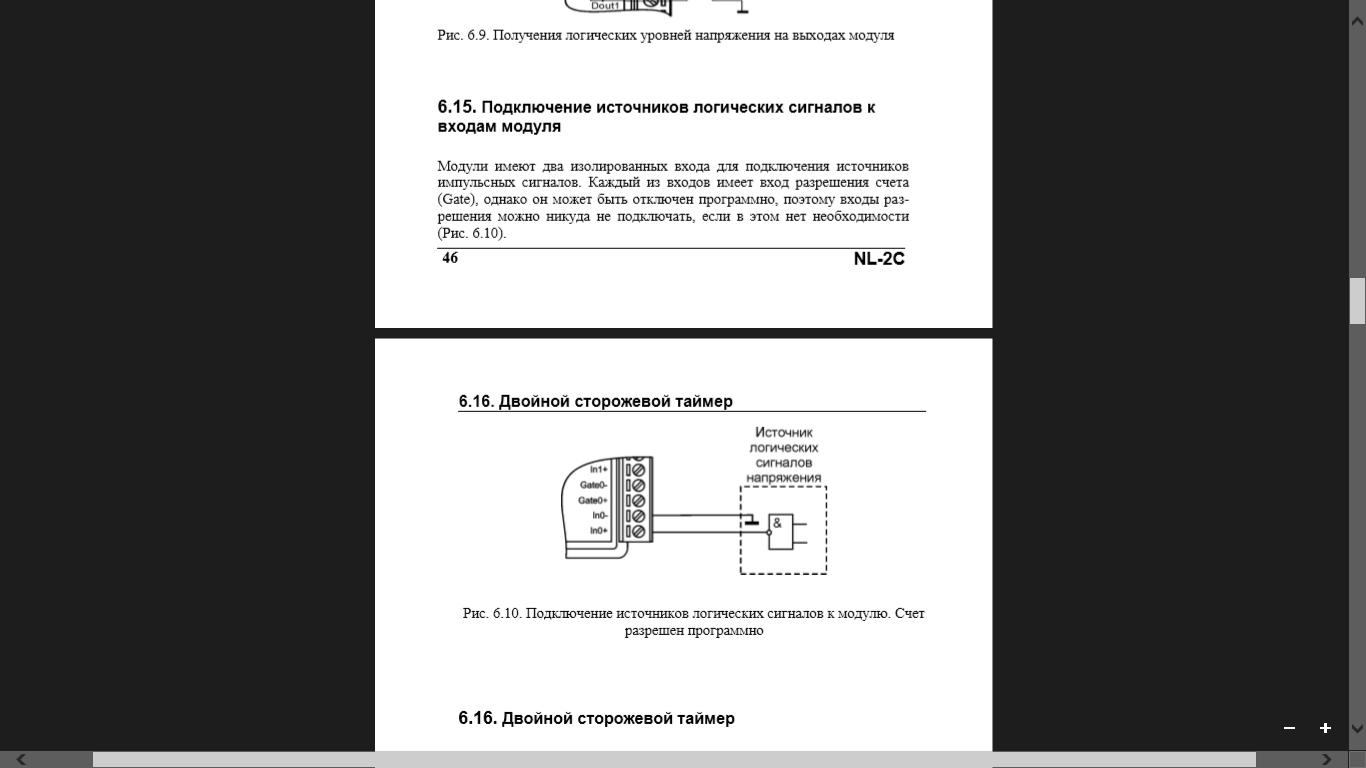
Рисунок 7. Схема подключения логических сигналов к модулю
Д
Характеристика модуля NL-8TI
Модуль NL-8TI является интеллектуальными (микропроцессорными) компонентом распределенной системы сбора данных и управления. Он обеспечивают аналого-цифровое , цифро-аналоговое преобразование информации и ввод-вывод дискретных сигналов, то есть функции, необходимые для построения эффективных систем управления производственными процессами в жестких условиях эксплуатации. Управление модулем осуществляется через порт RS-485 с помощью набора команд в ASCII кодах. Имеет режим программной калибровки и может быть использованы в качестве средств измерений. Все настройки модулей выполняются программно из управляющего компьютера (контроллера). Программно устанавливаются: диапазон измерения, формат данных, адрес модуля, скорость обмена, наличие бита контрольной суммы, параметры калибровки. Настроечные параметры запоминаются в ЭППЗУ и сохраняются при выключении питания. Данный модуль имеют два сторожевых таймера, один из которых перезапускает модуль в случае его "зависания" или провалов напряжения питания, второй переводит выходы модуля в безопасные состояния при "зависании" управляющего компьютера. Набор команд каждого модуля состоит из примерно 20...50 различных команд. Команды передаются в стандартных ASCII кодах, что позволяет программировать модули с помощью практически любого языка программирования высокого уровня. Модуль NL-8TI позволяет устанавливать для каждого канала свой диапазон измерений или тип датчиков.
Основным назначением модуля является усиление, преобразование в цифровой код и ввод в управляющий компьютер или контроллер измеренных значений температуры, тока или напряжения, поступающего от устройств нормализации сигналов или непосредственно от разнообразных датчиков. Для работы с токовыми сигналами параллельно входам модуля подключают прецизионный резистор сопротивлением 125 Ом. Модуль может быть использован для удаленного сбора данных, диспетчерского управления, в системах безопасности, для лабораторной автоматизации, автоматизации зданий, тестирования продукции.
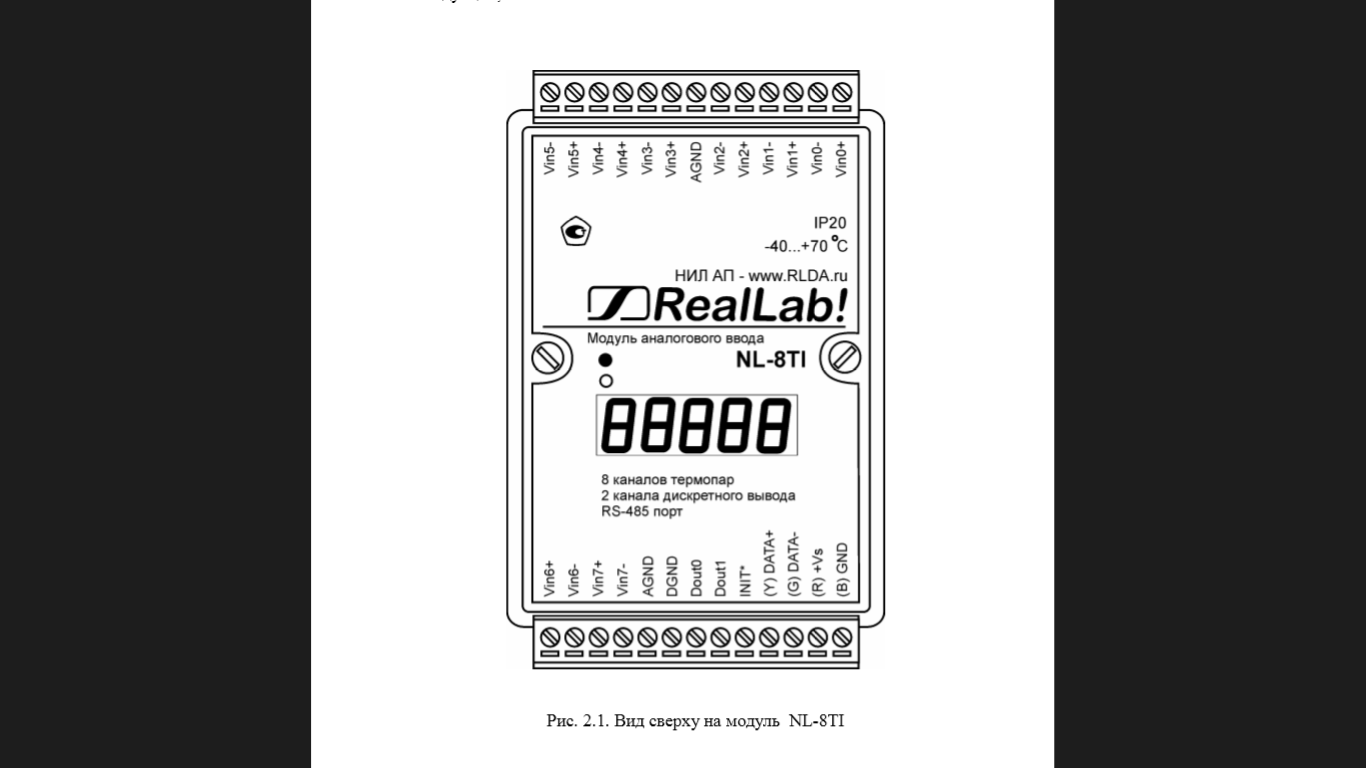
Рисунок 8. Внешний вид модуля
Модуль состоит из основания, печатной платы и крышки, которая прикрепляется к основанию двумя винтами, и съемных клеммных колодок. Крышка не предназначена для съема потребителем. Съемные клеммные колодки позволяют выполнить быструю замену модуля без отсоединения подведенных к нему проводов. Для отсоединения клеммной колодки нужно силой вытащить колодку из ответной части, остающейся в модуле. Корпус выполнен из ударопрочного полистирола методом литья под давлением. Внутри корпуса находится печатная плата. Монтаж платы выполнен по технологии монтажа на поверхность. Для крепления на DIN-рейке используют пружинящую защелку, которую оттягивают в сторону от корпуса с помощью отв
ертки, затем надевают корпус на 35-мм DIN-рейку и защелку отпускают. Для крепления к стене можно использовать отрезок ДИН-рейки, которая закрепляется двумя шурупами на стене, затем не ней закрепляется модуль с помощью его защелки. Модули можно также крепить один сверху другого.
Модуль имеет дифференциальные входы, к которым могут подключаться любые источники аналоговых сигналов напряжения и источники токовых сигналов в диапазоне 0-20 и 4-20 мА. Сигналы с входа модуля подаются на вход АЦП через аналоговый коммутатор (мультиплексор) и преобразуются в цифровой 24-разрядный код. АЦП имеет встроенный цифровой фильтр и усилитель с цифроуправляемым коэффициентом усиления. Это позволяет программно изменять полосу пропускания модуля и диапазон входных напряжений. Число разрядов АЦП уменьшается при увеличении усиления. Поэтому для работы с термопарами число разрядов было уменьшено до 16, что позволило получить максимальное усиление. Цифровой сигнал с выхода АЦП поступает в микроконтроллер через изолирующий повторитель с магнитной связью. Изолированная часть модуля, содержащая АЦП, питается через развязывающий преобразователь постоянного напряжения, чем обеспечивается полная гальваническая изоляция входов от блока питания и интерфейсной части.
Назначение входов и выходов
NL-8TI имеет 8 каналов ввода сигналов термопар и 2 дискретных выхода. Системы промышленной автоматизации являются аналогоцифровыми. Поэтому одним из источников погрешностей аналоговой части является помеха, создаваемая цифровой частью системы. Для исключения прохождения помех через цепи заземления цифровую и аналоговую землю выполняют в виде несвязанных проводников, соединённых вместе только в одной общей точке. Для этого модули ввода/вывода и промышленные контроллеры имеют отдельные выводы аналоговой земли (AGND) и цифровой (DGND).
| Наименование входа/выхода | Назначение |
| Vin5- и Vin5+ | Ввод сигналов с термопар |
| Vin4- и Vin4+ | Ввод сигналов с термопар |
| Vin3- и Vin3+ | Ввод сигналов с термопар |
| Vin2- и Vin2+ | Ввод сигналов с термопар |
| Vin1- и Vin1+ | Ввод сигналов с термопар |
| Vin0- и Vin0+ | Ввод сигналов с термопар |
| Vin6- и Vin6+ | Ввод сигналов с термопар |
| Vin7- и Vin7+ | Ввод сигналов с термопар |
| AGND | Аналоговая земля |
| DGND | Цифровая земля |
| Dout0 и Dout1 | Дискретные выходы (для управляющего воздействия на исполнительное устройство, например, на нагреватель или на охладитель) |
| INIT* | Вывод для применения режима INIT (для изменения скорости обмена или бита контрольной суммы, а также в случае, когда пользователь забыл ранее установленные параметры конфигурации модуля) |
| (Y) DATA+ и (G) DATA- | Подключение к промышленной сети на основе интерфейса сети RS-485 (выполняется экранированной витой парой – Y (yellow) желтый провод и G (green) зеленый првод) |
| (R) +Vs | Подключение к источнику питания положительный полюс (красный провод (red)) |
| (B) GND | Земля (подключается черным проводом (black)) |
Модуль имеет дифференциальные входы, к которым могут подключаться любые источники аналоговых сигналов напряжения и источники токовых сигналов в диапазоне 0-20 и 4-20 мА. Сигналы с входа модуля подаются на вход АЦП через аналоговый коммутатор (мультиплексор) и преобразуются в цифровой 24-разрядный код. АЦП имеет встроенный цифровой фильтр и усилитель с цифроуправляемым коэффициентом усиления. Это позволяет программно изменять полосу пропускания модуля и диапазон входных напряжений. Число разрядов АЦП уменьшается при увеличении усиления. Поэтому число разрядов было уменьшено до 16, что позволило реализовать максимальное усиление 128, что необходимо, например, при работе с термопарами.
Цифровой сигнал с выхода АЦП поступает в микроконтроллер через изолирующий повторитель с магнитной связью. Изолированная часть модуля, содержащая АЦП, питается через развязывающий преобразователь постоянного напряжения, чем обеспечивается полная гальваническая изоляция входов от блока питания и интерфейсной части. Микроконтроллер модуля выполняет следующие функции: исполняет команды, посылаемые из управляющего компьютера; компенсирует нелинейности термопар и резистивных термопреобразователей с помощью записанной в ЭППЗУ калибровочной таблицы; выполняет калибровку модулей; реализует протокол обмена через интерфейс RS-485.
В состав модуля входит сторожевой таймер, вырабатывающий сигнал сброса, если микроконтроллер перестает вырабатывать периодический сигнал, подтверждающий, что микроконтроллер не "завис". Второй сторожевой таймер внутри микроконтроллера переводит выходы модуля в безопасные состояния, если из управляющего компьютера перестает приходить сигнал, подтверждающий его работоспособность. Обычно безопасными состояниями считаются те, которые получаются на выходах модуля при отключении питания. В описываемых модулях это высокоомные состояния. Однако выходам модуля можно назначить любые состояния, которые в конкретных условиях применения считаются безопасными.
Схема питания модулей содержит вторичный импульсный источник питания, позволяющий преобразовывать напряжение питания в диапазоне от +10 до +30 В в напряжение +5 В. Модули содержат также изолирующий преобразователь напряжения из +5В в ±15В для питания аналоговой части и второй изолирующий преобразователь для питания выходных каскадов модуля. Для питания АЦП используется линейный стабилизатор напряжения, преобразующий +15 В в +5 В.
Для получения дискретных выходов с высокой степенью защиты использованы интеллектуальные МОП ключи фирмы International Rectifier.
Интерфейс RS-485 выполнен на стандартных микросхемах фирмы Analog Devices, удовлетворяющих стандартам EIA для интерфейсов RS-485 и RS-422 и имеющих защиту от электростатических зарядов, от выбросов на линии связи, от короткого замыкания и от перенапряжения. Дополнительно в модуле использована позисторная защита от перенапряжения на клеммах порта RS-485. Аналогичная защита использована для входа источника питания.
Для построения сети рекомендуется использовать экранированную витую пару проводов. Модули подключаются к сети с помощью клемм DATA+ и DATA-.
Любые разрывы зависимости импеданса линии от пространственной координаты вызывают отражения и искажения сигналов. Чтобы избежать отражений на концах линии, к ним подключают согласующие резисторы. Сопротивление резисторов должно быть равно волновому сопротивлению линии передачи сигнала. Если на конце линии сосредоточено много приемников сигнала, то при выборе сопротивления согласующего резистора надо учитывать, что входные сопротивления приемников оказываются соединенными параллельно между собой и параллельно согласующему резистору. В этом случае суммарное сопротивление приемников сигнала и согласующего резистора должно быть равно волновому сопротивлению линии. Поэтому на рисунке сопротивление R=120 Ом, хотя волновое сопротивление линии равно 100 Ом . Чем больше приемников сигнала на конце линии, тем большее сопротивление должен иметь терминальный резистор.
Наилучшей топологией сети является длинная линия, к которой в разных местах подключены адресуемые устройства. Структура сети в виде звезды не рекомендуется в связи со множественностью отражений сигналов и проблемами ее согласования.
Установка конфигурации модуля
Прежде чем подключить модуль к сети, его необходимо сконфигурировать, т.е. задать скорость обмена данными, установить бит контрольной суммы, адрес, номер входного диапазона и формат данных.
Команды, посылаемые управляющим компьютером в модуль, имеют следующую синтаксическую структуру:
[разделительный символ][адрес][команда][данные][CHK][cr],
где CHK - контрольная сумма из двух символов (в контрольную сумму не включается код символа возврата каретки); cr - возврат каретки (ASCII код 0Dh).
Каждая команда начинается разделительным символом , в качестве которого могут быть использованы знаки: $, #, %, @, *, в ответах модуля используются знаки , !, ?, >.
Адрес модуля состоит из двух символов и передается в шестнадцатеричной системе счисления. За некоторыми командами следуют данные, но их может и не быть. Контрольная сумма, состоящая из двух букв, может быть или отсутствовать. Каждая команда должна оканчиваться символом возврата каретки (CR). ВСЕ КОМАНДЫ ДОЛЖНЫ БЫТЬ НАБРАНЫ В ВЕРХНЕМ РЕГИСТРЕ! При использовании ОРС сервера NLopc символы можно набирать в любом регистре , поскольку сервер автоматически переводит все символы команд в верхний регистр перед пересылкой в модуль .
Команды, используемые в серии NL, делятся на 4 типа:
• команды модулей аналогового ввода;
• команды модулей аналогового вывода;
• команды дискретного ввода-вывода;
• команды счетчиков/таймеров.
Несмотря на то, что для разных модулей команды могут выглядеть одинаково, реакция модулей на них может быть различной. Поэтому необходимо обращать внимание на сноску под описанием команды, в которой может быть указано, к каким типам модулей она применима.
Синтаксис: %AANNTTCCFF[CHK](cr), где
AA- адрес (от 00 до FF);
NN- новый адрес (от 00 до FF): 3110 – 1F16;
TT - код входного диапазона или типа датчика: термопара J – «OE»;
CC- скорость работы на RS-485: 19200 бит/с – «07»;
FF - новый формат данных:
инженерный формат данных – «00»
контрольная сумма – отключена;
В верхней строке таблицы проставлены номера битов в 8-битовом слове, в нижней строке указаны их коды, под таблицей - соответствия между кодами и их смыслом.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| *1 | *2 | 0 | 0 | 0 | 0 | *3 | |
*1 - Выбор фильтра: 0 - 60Hz; 1 - 50Hz;
*2 - Контрольная сумма: 0 – Выключена; l – Включена;
*3 - Формат данных: 00 - инженерные единицы;
01 - проценты;
10 = шестнадцатеричный формат; 11 – Омы (Только для NL-4RTD)
Тогда получим: 100000002=8016
Значит, в позиции FF запишем – «80».
Таким образом, команда для конфигурирования модуля примет вид:
%011FOE0780(cr)
Список используемой литературы
СОЛАС – ИМО 1997 г. ГЛАВА II-1 - Правило 51 Система аварийно-предупредительной сигнализации.
Самойленко А.Ю. Электронные и микропроцессорные средства судовых систем управления. Учебное пособие. 3-е издание, перераб. и доп.– Новороссийск: ГМУ им. адм. Ф.Ф.Ушакова, 2014. – 210 с.
Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. - М.: Горячая линия-Телеком, 2009.-608 с.
Модули удаленного ввода вывода серии NL. Техническое описание. Материалы интернет-сайта.