Обработка тела вращения. 10.04 ПЗ Вариант 12. Курсовой проект по дисциплине Автоматизация транспортировки, загрузки и сборки изделий
 Скачать 0.92 Mb. Скачать 0.92 Mb.
|

127. Описание позиции загрузки-выгрузкиС учётом времени обработки на данном станке (Tшк = 35 мин) для позиции загрузки и выгрузки был взят стол, с установленными на него ограничителями для базирования заготовок. Стол для загрузки имеет 13 позиций загрузки, а стол для выгрузки также 13 позиций для готовых деталей. Расстояния между ограничителями 50 мм. Для удобства загрузки-выгрузки заготовок и готовых деталей промышленным роботом, Стол имеет габаритные размеры: 2300х900х1200мм 138. Система управление РТК13.1.18.1 СЧПУ станкаНа станке МЦ800 используется СЧПУ «2С85» Структурная схема СЧПУ 2С85 представлена на рисунке 9. Основной областью применения устройства является управление многоцелевыми станками. [4] 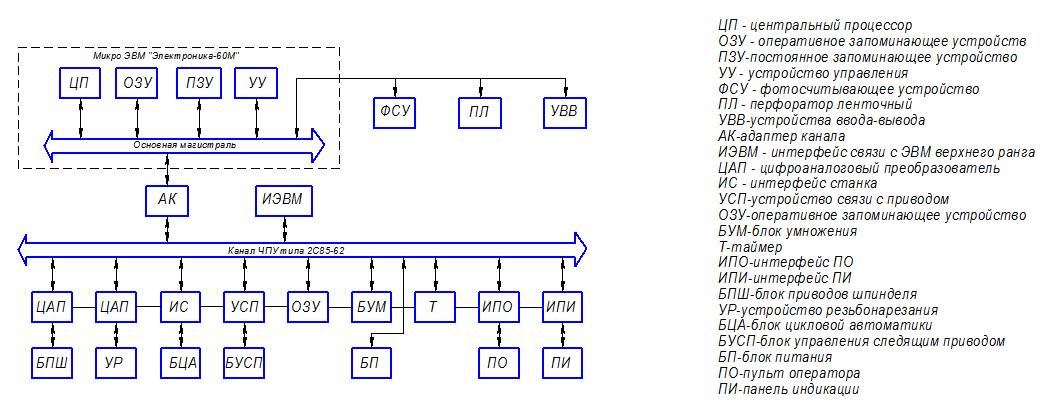 Рисунок 9.1 - Структурная схема СЧПУ 2С85 13.28.2 СЧПУ промышленного роботаПромышленный робот М20П.405.01 использует СЧПУ позиционного управление УПМ-772. Структурная схема представлена на рисунке 9.2. Числовые системы позиционного управления типа УПМ комплектуются с ПР, обслуживающими металлорежущие станки, подъемно-транспортные операции, простейшие сборочные работы и др. Технологическая информация включает до шести-десяти команд, программирование осуществляется методом обучения. Информация с пульта обучения и пульта управления записывается в оперативную память устройства, для длительного хранения ее можно переписать на магнитную ленту кассетного накопителя.[5]  Рисунок 9.2 - Структурная схема УПМ-772 13.2.18.3 Алгоритм работы промышленного роботаАлгоритм работы ПР представлен на рисунке 9.3.    Рисунок 9.3 - Алгоритм работы ПР 14ЗаключениеВ данном курсовом проекте была робото-технологический комплекс для автоматизированной механической обработки детали “Упор” на базе токарно-винторезного станка с ЧПУ 16А20Ф3С39. Для РТК был взят промышленный робот напольного типа модели М20П.40.01. Для него было спроектирована конструкция специального быстросменного схвата с поворотными зажимными губками для плоских деталей. На позиции загрузки и выгрузки использовались столы с ограничителями-пластинами. Для захватного устройства был произведён расчёт усилия зажима, усилия привода и контактных напряжений. Так же для ПР был разработан алгоритм работы. 15Список использованной литературыСправочник технолога - машиностроителя: Т.2./под редакцией А.Г. Косиловой - М.: Машиностроение, 1986 - 496 с. Справочник инструментальщика / Ординарцев И.А. и др. – Л.: Машиностроение, 1987 – 846с "Справочник технолога машиностроителя". Справочник в двух томах; Том 2. Под редакцией А.Г. Косиловой, Р.Е. Мещерякова. - 4-е издание, переработанное и дополненное. – М.: "Машиностроение", 1986. - 496с. Роботизированные технологические комплексы и гибкие производственные системы в машиностроении: Альбом схем и чертежей: Учеб. пособие для вузов/Ю. М. Соломенцев, К. П. Жуков, Ю. А. Павлов и др.; Под общ. ред. Ю. М. Соломенцева. – М.: Машиностроение, 1989. – 192 с.; ил. Промышленные роботы в машиностроении: Альбом схем и чертежей: Учеб. пособие для вузов/ Ю. М. Соломенцев, К. П. Жуков, Ю. А. Павлов и др.; Под общ. ред. Ю. М. Соломенцева. – М.: Машиностроение, 1989. – 192 с.; ил. Локтева С.Е. Станки с программным управлением и промышленные роботы. – М.: Машиностроение, 1986, – 320 с. Современные промышленные роботы: Каталог/ Под ред. Ю. Г. Козырева, Я. А. Шифрина. – М.: Машиностроение, 1984. – 152 с.; ил. (Автоматические манипуляторы и робототехнические системы). Суслов А.Г. Технология машиностроения: Учебник для студентов машиностроительных специальностей вузов. – 2-е изд. перераб. и доп. М.: Машиностроение, 2007. 430 с. Под ред. Зубченко А.С.: Марочник сталей и сплавов. Справочник. - Справочник. – М.: Машиностроение, 2003. – 784 с. |