Матвеев 2.0. Курсовой проект по дисциплине Автоматизированные системы управления судовых энергетических установок
 Скачать 1.18 Mb. Скачать 1.18 Mb.
|

1.7 Функциональная схема системы автоматического регулирования Ф 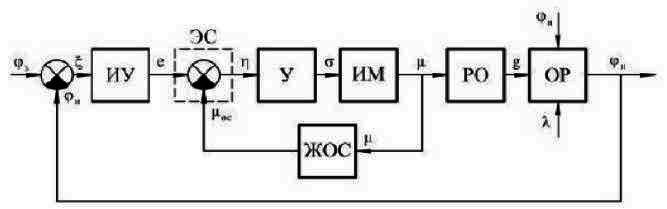 ункциональная схема системы автоматического регулирования представляет собой совокупность функциональных блоков (рисунок 2), выполняющих определенные функции. ункциональная схема системы автоматического регулирования представляет собой совокупность функциональных блоков (рисунок 2), выполняющих определенные функции.Рис. 7. Функциональная схема системы автоматического регулирования. Главными элементами системы автоматического регулирования являются следующие функциональные блоки: Измерительное устройство (ИУ) - вычисляет разность £ между заданным фз и измеренным фи значениями регулируемой величины (уровень воды в пароводяном барабане котла) и формирует ошибку регулирования ц (угол поворота валика мембранного измерительного устройства); Усилитель (У) - за счет энергии внешнего источника (вода подаваемая в усилительное водяное реле) усиливает сигнал ошибки регулирования п, до величины а (давление на выходе из приемных сопел усилительного водяное реле), достаточной для управления исполнительным устройством (поршневым сервомотором); Исполнительный механизм (ИМ) - преобразует выходной сигнал усилителя а в перемещение регулирующего органа g(перемещение поршня сервомотора); Регулирующий орган (РО) - воздействует (перемещение штока клапана подачи питательной воды) на объект регулирования путем изменения его пропускной способности g; Объект регулирования (ОР) - устройство (пароводяной барабан котла), в котором осуществляется технический процесс, подлежащий регулированию. Жесткая обратная связь (ЖОС) - связь (пружина, контролирующая действие усилительного водяного реле), при которой в любой момент времени на вход усилителя (усилительного водяного реле) поступает сигнал цос пропорциональный выходному сигналу исполнительного механизма (поршня сервомотора) g. Выбор оптимальных параметров системы автоматического регулирования 1.8 Получение передаточных функций объекта регулирования На отклонение уровня воды в пароводяном барабане котла одновременно влияют материальный и энергетический балансы. Поэтому с достаточной для решения практических задач точностью судовой паровой котел, как объект регулирования, может рассматриваться как двухъемкостный объект, состоящий из двух параллельно соединенных функциональных блоков (рисунок 3): Интегрирующий блок (ИБ) - блок в котором входной величиной является баланс подвода воды gи отвода пара X, а выходной величиной является уровень воды в пароводяном барабане котла фв1; Апериодический блок (АПБ) - блок в котором входной величиной является изменение давления пара фп, а выходной величиной является уровень воды в пароводяном барабане котла фв2. 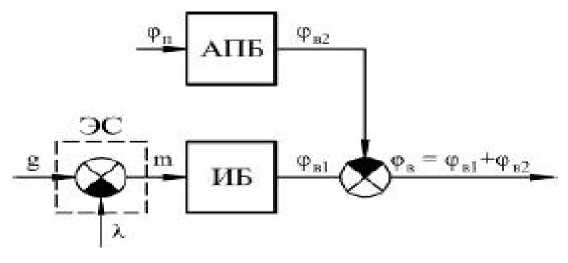 Рис. 8. Функциональная схема объекта регулирования. ередаточная функция элемента сравнения может быть представлена следующим операторным уравнением:  Передаточная функция интегрирующего блока может быть представлена следующим операторным уравнением: Передаточная функция интегрирующего блока может быть представлена следующим операторным уравнением: Передаточная функция апериодического блока может быть представлена следующим операторным уравнением: Передаточная функция апериодического блока может быть представлена следующим операторным уравнением:В результате динамика уровня воды в пароводяном барабане котла может быть описана следующим операторным уравнением: Т1 ∗𝑝∗ (𝑇2 ∗𝑝 + 1) ∗𝜑в = (Т2 ∗𝑝 + 1) ∗𝐾эс∗ (𝑔 – 𝜆) − 𝐾∗𝑇1 ∗𝑝∗𝜑n  Динамика уровня воды в пароводяном барабане котла может быть описана следующим дифференциальным уравнением: Динамика уровня воды в пароводяном барабане котла может быть описана следующим дифференциальным уравнением:В вышеприведенных уравнениях: фв - относительное приращение уровня воды впароводяном барабане котла; фп - относительное приращение давления пара на выходе из котла; g- относительное изменение пропускной способности питательного клапана котла (влияет на количество воды поступающей в котел); X - относительное изменение пропускной способности маневрового клапана турбины (влияет на количество пара уходящего из котла); Т i- время разгона котла по уровню воды; Т 2 - время разгона котла по набуханию; K- безразмерный коэффициент усиления, связывающий перемещение маневрового клапана турбины со скоростью парообразования; Кэс - безразмерный коэффициент усиления элемента сравнения. Расчет численных коэффициентов передаточных функций объекта Регулирования Основными численными коэффициентами, входящими в состав передаточных функций объекта регулирования, являются безразмерные коэффициенты усиления K и Кэс, время разгона котла по уровню воды T1, а также время разгона котла по набуханию Т2. Коэффициент усиления К=0,90 – принимается из опыта эксплуатации Коэффициент усиления Кэс=1,00 – принимается из опыта эксплуатации Время разгона котла по уровню воды – максимальное время, на которое хватит объема, заключенного между верхним и нижним допустимыми уровнями воды в котле, при максимальном расходе пара и отсутствии подачи воды. Паропроизводительность котла, D: D = 250 кг / ч – задано по условию. Паропроизводительность зеркала испарения котла, R: R = 740,00 кг /(м2 × ч) – задано по условию. Коэффициент нагруженности котла, d: d = 50,00 % – задано по условию. Максимальное изменение уровня котловой воды, Δh: Dh = 0,8м – задано по условию. Плотность котловой воды, ρв: 900,00 кг / м3 в r = – принимается из опыта эксплуатации. Плотность перегретого пара, ρп: 5,00 кг / м3 п r = – принимается из опыта эксплуатации. Площадь зеркала испарения котла, F: F =  * * = 0.16 м2 = 0.16 м2Время разгона котла по уровню воды, Т1: Т1 = F*  =0.968ч =3483 с =0.968ч =3483 сВремя разгона котла по набуханию – максимальное время, необходимое на изменение уровня воды в котле вследствие изменения объема пароводяной смеси при резком нарушении режима работы котла. Объем пара под зеркалом испарения котла, V: V = F × ∆h = 0,43× 0,50 ≈ 0,135 м3 . Время разгона котла по набуханию, Т2: Т2 = V*  =0.876 ч =3154 с =0.876 ч =3154 сПередаточная функция интегрирующего блока: Wέὰ =  Передаточная функция апериодического блока: Wὰά =  На основании вышесказанного следует отметить, что изменение давления пара существенно влияет на уровень воды в пароводяном барабане котла, тогда как изменение уровня воды на давление пара в котле не влияет. Следовательно, свойством саморегулирования по уровню воды судовой паровой котел не обладает. Получение передаточных функций регулятора В соответствии с функциональной схемой регулятора системы автоматического регулирования (рисунок 4) могут быть получены передаточные функции его элементов. В соответствии с функциональной схемой регулятора системы автоматического регулирования (рисунок 4) могут быть получены передаточные функции его элементов. 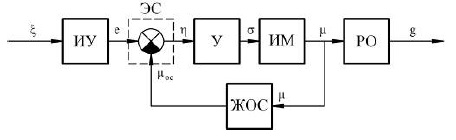 Рисунок 9. Функциональная схема регулятора. Динамика измерительного устройства может быть описана следующим операторным уравнением: е=Kцу*ξ Динамика элемента сравнения может быть описана следующим операторным уравнением: η=Кэс*(е-µос) Динамика усилителя может быть описана следующим операторным уравнением: =Ку*η Динамика исполнительного механизма может быть описана следующим операторным уравнением: Тим*р*µ= Динамика регулирующего органа может быть описана следующим операторным уравнением: g=Kpo*µ Динамика жесткой обратной связи может быть описана следующим операторным уравнением: µoc=Koc*µ Передаточная функция измерительного устройства имеет вид: W иу(p) = K иу Передаточная функция элемента сравнения имеет вид: W эс(p) = K эс Передаточная функция усилителя имеет вид: Wy(p)= Ky Передаточная функция исполнительного механизма имеет вид:  Передаточная функция регулирующего органа имеет вид: W ро(p) = K ро Передаточная функция жесткой обратной связи имеет вид: W оc(p) = K оc Расчет численных коэффициентов передаточных функций регулятора Основными численными коэффициентами, входящими в состав передаточных функций регулятора, являются безразмерные коэффициенты усиления Киу, Кэс, Ку, Кро, Кос, и время перемещения поршня сервомотора Тим. Коэффициент усиления, Киу: Kиу = 15,00 - принимается из опыта эксплуатации. Коэффициент усиления, Кэс: Kэс = 1,00- принимается из опыта эксплуатации. Коэффициент усиления, Ку: Kу = 50,00- принимается из опыта эксплуатации. Коэффициент усиления, Кро: Kро = 1,00- принимается из опыта эксплуатации. Коэффициент усиления, Кос: K Tим = 25,00 c- принимается из опыта. ос = 1,00- принимается из опыта эксплуатации. Время перемещения поршня сервомотора, Тим: Возможные неисправности регулятора системы автоматического регулирования и способы их устранения Наиболее характерным эксплуатационным износом элементов регулятора системы автоматического регулирования является увеличение их нечувствительности ввиду загрязнения или повреждения подшипниковых узлов, нарушения плотности клапанов сальников и т.д. Старение пружин регулятора приводит к потере их упругих свойств. Планово-предупредительные осмотры и ремонты регулятора системы автоматического регулирования производятся для своевременного обнаружения повреждений и дефектов. Различают: ежедневные осмотры, ежемесячные осмотры, полугодовые осмотры и ремонты, ежегодные осмотры и ремонты. Если регулятор поддерживает слишком высокой уровень воды в котле, хотя его перенастройка не производилась, это означает, что порвана мембрана уровня воды и ее следует заменить.Настройка регулятора системы автоматического регулирования заключается в регулировании величины настроечного параметра и приведение его к норме, установленной в ходе наладки опытных образцов. Возможные неисправности регулятора системы автоматического регулирования: Утечки рабочих жидкостей вследствие неисправности уплотнений трубопроводов; Заедание поршня сервомотора; Износ трущихся частей; Загрязнение каналов грязью. Наладка регулятора системы автоматического регулирования Для наладки регулятора системы автоматического регулирования используется алгоритмический метод. Порядок наладки регулятора системы автоматического регулирования: Объект регулирования с включенным регулятором выводится на постоянную нагрузку Ро |