Матвеев 2.0. Курсовой проект по дисциплине Автоматизированные системы управления судовых энергетических установок
 Скачать 1.18 Mb. Скачать 1.18 Mb.
|

Измерители уровняДля измерения уровня жидкости применяются различные измерительные устройства в зависимости от типа объекта и характера протекающих процессов. Наиболее простым является поплавковый измеритель уровня. Изменение уровня жидкости  h в резервуаре приводит к изменению положения поплавка Выходным сигналом ЧЭ является перемещение h в резервуаре приводит к изменению положения поплавка Выходным сигналом ЧЭ является перемещение свободного конца рфяага 2, разворачивающегося относительно опоры 3. свободного конца рфяага 2, разворачивающегося относительно опоры 3.Мембранный измеритель уровня (рис. 7, б) получил ши- рокое распространение на судах отечественной постройки при ав- томатизации паровых котлов. ЧЭ уровня воды в барабане котла является мембрана 5, разделяющая корпус измерителя на две по- лости. К жесткому центру мембраны подвешен груз 6. Нижняя по- лость корпуса через дроссельный клапан 7 соединена с конденса- ционным сосудом 2, уровень в котором поддерживается постоян- ным за счет обратного слива конденсата в котел через перепускную трубу, и на мембрану снизу действует столб воды.hο . Верхняя по лость соединена с водяным пространством барабана котла 1: на мембрану сверху действует столб воды.h1 . Сила, действующая на мембрану от перепада уровней воды h= hο - h1 уравновешивается суммой сил от массы груза 6и настроечной пружины 3: h hpqfa =  + +  q– ускорение силы тяжести (ускорение свободного падения); fа – активная площадь мембраны; Fм – сила действия массы груза; 1 – передаточный коэффициент; си zо – жесткость и предварительный затяг настроечной пружины. Груз 6подвешивают к жесткому центру мембраны для уменьше- ния статической неравномерности измерителя и снижения влияния крена судна. Обычно массой груза уравновешивают 80% силы от перепада уровней, а остальные 20% силы компенсируют действием пружины 3. Статическую настройку измерителя на заданное значе- ние уровня производят изменением ее предварительного затяга zо. Изменение уровня воды в котле hприводит к нарушению равенства сил, действующих на мембрану, ее прогибу, развороту рычага 4и пропорциональному перемещению у его выходного конца. Достоинством мембранных измерителей является их высокая чувствительность и отсутствие тепловой инерционности. На работу этого измерителя не влияет изменение давления в котле, так как оно действует на мембрану с обеих сторон. Влияние качки на рабо- ту измерителя можно снизить установкой на импульсные каналы дроссельных шайб 7. 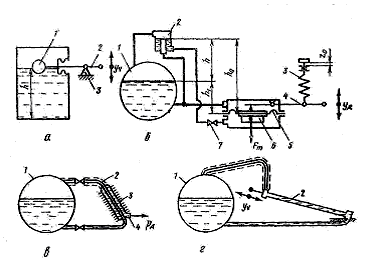 Рис. 7. Измерители уровня: а– поплавковый; б– мембранный; в– термогидравлический; г– термостатический Термогидравлический измеритель уровня, стоящий из ЧЭ (рис. 7, в) и измерителя давления, применяется в паровых кот- лах. ЧЭ уровня представляет собой генератор, состоящий из сталь- ной трубки 2, закрепленной внутри кожуха 3 с ребрами. Верхний конец трубки 2 соединен с паровым, а нижний – с водяным про- странством пароводяного барабана котла 1, поэтому согласно свой- ству сообщающихся сосудов уровень воды в них всегда одинаков. Пространство между трубкой 2 и кожухом 3 заполнено конденса- том и соединяется трубкой 4с измерителем давления или мембранным сервомотором, управляющим питательным клапаном кот- ла. ЧЭ устанавливается так, чтобы угол наклона его к горизонтальной оси барабана котла был равен приблизительно 30°, а его середина соответствовала нормальному уровню воды в барабане. При изменении уровня воды в барабане котла изменяется соот- ношение между площадями поверхностей трубки 2, омываемыми водой и паром. Из термодинамики известно, что теплоотдача пара выше, чем воды при одинаковой их температуре, поэтому количе- ство тепла, передаваемого водой и паром через трубки 2 конденса- ту, заполняющему кольцевое пространство датчика, будет различ- ным. Изменение количества тепла, подводимого к конденсату, вы- зовет его испарение (при понижении уровня воды) или конденса- цию за счет отдачи тепла через ребра кожуха 3 в окружающую сре- ду (при повышении уровня воды). Это приводит соответственно к пропорциональному повышению или понижению давления паров конденсата Рд на выходе ЧЭ. От ЧЭ давление конденсата по им- пульсной трубке передается измерителю давления, выходным сиг- налом которого является перемещение. Термогидравлический измеритель уровня малочувствителен к качке, что объясняется его большой тепловой инерционностью, обладает малой статической нечувствительностью из-за отсутствия механических соединений и значительной величиной выходного сигнала, прост по конструкции и удобен в эксплуатации. Однако он имеет ряд существенных недостатков, из-за которых его примене- ние ограничено. Изменение параметров пара в котле и температуры окружающей среды приводит к изменению выходного сигнала из- мерителя. Нарушение герметичности импульсной магистрали или датчика может привести к утечке конденсата и аварии котла. Большая тепловая инерционность ЧЭ вызывает замедленную реак- цию измерителя на резкое изменение уровня воды в котле при глу- боких изменениях нагрузки, поэтому его применяют при автомати- зации малонапряженных котлов. Термостатический измеритель уровня (рис. 7, г) представляет собой трубку 2 из стали с большим коэффициентом ли- нейного расширения. Установка термостатического датчика произ- водится аналогично термогидравлическому. Нижний конец трубки 2, закреплен неподвижно, а верхний свободный конец может пере- мещаться. При изменении уровня воды в барабане котла 1 изменя- ется длина участков трубки, заполненных паром и водой. Из-за различных коэффициентов теплоотдачи пара и воды из- меняется температура и длина термостатической трубки 2. Перемещение свободного конца трубки Уч пропорционально изменению уровня и является выходным сигналом измерителя. Термостатический измеритель прост по устройству, удобен в эксплуатации, имеет большой срок службы. Из-за большой тепло- вой инерционности прибор слабо реагирует на качку, однако по этой же причине не может быть установлен на высоконапряженных котлах с малым водосодержанием и широкого распространения на судах не получил. В системах автоматического контроля уровня выходной пара- метр ЧЭ преобразуется в сигнал, удобный для дистанционной пе- редачи. В качестве дистанционных указателей уровня в судовых паро- вых котлах применяются указатели с мембранными ЧЭ 4(рис. 8). Изменение уровня hприводит к пропорциональному перемещению выходного рычага 5и связанного с ним движка реохорда R1, включенного в измерительную цепь логометра 3. 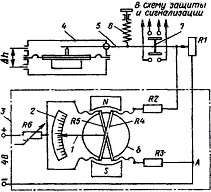 Рис. 8. Схема мембранного логометрического измерителя уровня Принцип действия логометра основан на измерении сопротивления мостовой схемой с температурной компенсацией. Подвижная часть логометра состоит из двух скрещенных под углом рамок с катушками индуктивности, обладающими активными сопротивлениями R4 и R5, ток к которым подводится через спиральные волосковые пружины. На оси рамок закреплена стрелка 1, перемещающаяся вдоль шкалы прибора 2. Рамки вращаются между сердечником 8 и полюсами N и S постоянного магнита в пространстве, где напряженность магнитного поля различна из-за переменного воз- душного зазора магнитной системы. Согласно упрощенной принципиальной схеме прибора ток от стабилизированного источника питания разветвляется в точке А и идет по цепям с сопротивлениями R3 + R5 и R1 + R2 + R4. Ток, проходя по рамкам, создает вокруг них магнитные поля, которые взаимодействуют с полем постоянного магнита, образуя два вращающих момента. Рамки включены таким образом, что эти моменты направлены навстречу друг другу и один из них является вращающим, а другой – противодействующим. При установившемся режиме моменты от взаимодействия полей уравновешены и рамка неподвижна. При смещении движка реохорда изменяются сопротивление R1и сила тока в цепи и нарушается равновесие моментов сил, под действием разности которых происходит разворот рамки и стрелки. В результате рамка с большим током смещается в область слабого магнитного поля, а с меньшим током – в область сильного магнитного поля, а рамка с меньшим током – в область сильного магнитного поля постоянного магнита. По мере разворота рамок равенство моментов восстанавливается и движение прекращается. В рассмотренном измерителе изменение уровня h вызывает пропорциональное смещение движка реохорда, изменение сопротивления его плеча R1 и перемещение стрелки прибора.Сопротивление R6 изменяется при изменении температуры окружающей среды и компенсирует ее влияние на показания логометра. Соответствие между значением уровня по водомерному стеклу котла и показанием логометра регулируется изменением предвари- тельного затяга настроечной пружины 6 измерителя уровня. При предельном снижении или повышении уровня якорь 7, закрепленный на рычаге 5, замыкает контакты цепей защиты и сигнализации, вызывая их срабатывание. Настройка на предельные значения уровня производится изменением зазоров между якорем и контактами – смещением последних. Для измерения уровня воды, топлива, масла либо других жидкостей в цистернах и танках применяются электронные измерители уровня с емкостными датчиками. Принцип действия дистанционного емкостного измерителя уровня рассмотрим по упрощенной принципиальной схеме (рис. 9). Датчик уровня представляет собой конденсатор Сд, одной обкладкой которого является поверхность стенок металлического резервуара 1, а другой – поверхность проводника зонда 2, вертикально закрепленного в резервуаре. 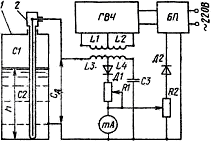 Рис. 9. Схема емкостного измерителя уровня Проводник зонда помещен в герметичную изоляционную оболочку из фторопласта. Емкость датчика Сд зависит от уровня жидкости в резервуаре, складываясь из емкости части датчика С1, рас- положенной выше поверхности жидкости, и емкости С2, расположенной ниже. Жидкость и воздух либо смесь газов над ее поверхностью обладают различными диэлектрическими свойствами, однако суммарная емкость датчика Сд = С1 + С2 линейно зависит от уровня жидкости и является его выходным параметром. Принцип действия измерительной части прибора основан на мостовом методе измерения емкости датчика Сд. С блока питания БПпи- тание подается на генератор высокой частоты ГВЧ, от которого ток высокой частоты поступает в катушки индуктивности L1 и L2. От этих катушек индуктируются высокочастотные колебания в катушках LЗ и L4, образующих два плеча моста переменного тока. Другие два плеча образованы конденсаторами Сд и СЗ. В диагональ моста по- дается переменный высокочастотный ток, который выпрямляется диодом Д1 и через резистор R1 идет на миллиамперметр (показывающий прибор). Шкала прибора градуирована в единицах уровня либо в процентах. Для установки стрелки на «0» при нулевом значении уровня жидкости в резервуаре предусмотрена подача тока на прибор в обратном направлении от БПчерез переменный резистор R2, позволяющая свести к нулю результирующий ток прибора. При повышении уровня жидкости в резервуаре изменяется емкость датчика Сд, нарушается равновесие токов и стрелка показывающего прибора отклоняется на величину, пропорциональную их разности. Несоответствие показаний прибора при максимальном значении уровня необходимо устранять корректировкой с помощью переменного резистора R1и последующей корректировкой нуля с помощью резистора R2. При смене сорта жидкости в резервуаре необходимо производить корректировку измерителя. При работе с вязкими средами наблюдается «облипание» зонда, что приводит к увеличению погрешностей измерения. Для устранения этого следует периодически очищать зонд. Для измерения уровня жидкости в балластных и топливных танках широкое распространение получили пневмеркаторные системы (рис. 10). 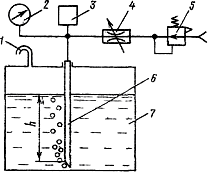 Рис. 10. Схема пневмеркаторной системы измерения уровня Роль ЧЭ измерителя уровня выполняет вертикальная труба 6, нижним свободным концом установленная вблизи днища танка 7. Через редуктор 5 и дроссель 4 к ее верхнему концу подводится сжа- тый воздух. Жидкость вытесняется из трубы 6 воздухом, который в виде пузырьков поднимается на поверхность и отводится через трубку 1в атмосферу. При постоянной плотности жидкости ρ давление воздуха Рв в трубе 6однозначно характеризуется уровнем жидкости в танке h, то есть Рв = hρ Это давление измеряется манометром 2 со шкалой, градуированной в единицах измерения уровня. Шкала каждого прибора градуируется определенной плотности жидкости с указанием ее значения. Для измерения уровня в топливно-балластных танках прибор может быть снабжен двумя шкалами, по одной из которых определяют уровень топлива, по другой – воды. Точность измерения зависит от того, насколько различаются плот- ности жидкости, заполняющей цистерну, и жидкости, на которую рассчитан прибор, а также от интенсивности движения потока воз- духа через трубу 6. Подача воздуха регулируется настройкой редук- тора 5 и должна быть минимальной (выход от одного до трех пу- зырьков воздуха в секунду) при максимальном уровне жидкости в танке. Информацию о максимальном значении уровня можно полу- чить установкой реле максимального давления 3. Библиографический список Печененко В.И., Козьминых Г.В. Основы автоматики и комплексная автоматизация судовых пароэнергетических установок. - М.: Транспорт, 1979. Сыромятников В.Ф. Основы автоматики и комплексная автоматизация судовых пароэнергетических установок. - М.: Транспорт, 1983. Сыромятников В.Ф. Наладка автоматики судовых энергетических установок. - Л.: Судостроение, 1990. Журенко М.А., Таранчук Н.В. Технические средства автоматизации судовых энергетических установок. - М.: Транспорт, 1990. Борисов, Н.Н «Основные требования к дипломным проектам и их оформлению». Методические указания. / Н.Н. Борисов, В.В. Колыванов, М.Ю. Храмов, М.Х. Садеков. - Н. Новгород: Изд-во ФГБОУ ВО «ВГУВТ», 2015. - 68с. Садеков М.Х. Судовые котельные установки. Атлас конструкций: метод. пособие по самост. изучению конструкций соврем. судовых котельных уст./ М.Х. Садеков, М.Ю. Храмов.- Н.Новгород: Изд-во ФБОУ ВПО «ВГАВТ», 2011 Воронов А.А. Основы теории автоматического регулирования и управления. - М.: Высшая школа, 1977. Садеков М.Х. Судовые котельные установки: описание конструкций: приложение к атласу/ М.Х. Садеков, М.Ю. Храмов.- Н.Новгород: Изд-во ФБОУ ВПО «ВГАВТ», 2012 Королев В.И. Методические указания, расчеты и примеры выполнения курсовой работы по автоматике. - Новороссийск: МГА им. адм. Ф.Ф.Ушакова, 2010. Ким Д.П. Теория автоматического управления. - М.: Физматлит, 2003. Толшин В. И. Автоматизация судовых энергетических установок: учебник / В. И Толшин, В. А Сизых; 2ое изд., перераб. и доп. -М.: Р Консульт, 2003. Онасенко В. САвтоматизация судовых энергетических установок / В. С Онасенко. - М.: Транспорт, 1981. Автоматизация судовых энергетических установок: метод. указания / сост. В. И Беспалов, М. Ю Храмов. - Н. Новгород изд. - ФГОУ ВПО “ВГАВТ”, 2007. Судовые энергетические установки: конспект лекций для студ. оч. и заоч. обуч. / В. И Беспалов, В. В Колыванов. - Н.Новгород: изд-во ФБОУ ВПО “ВГАВТ”, 2012. Конаков Г. А, Васильев Б. В. Судовые энергетические установки и техническая эксплуатация флота. Учебник для вузов водн. трансп. - М: Транспорт, 1980. Расчет и выбор основного оборудования судовой энергетической установки: метод. указания к дипломному и курсовому проекту для студентов оч. и заочн. обучения / В. И Беспалов, Ю. В Варечкин, М. Х Садеков. - Н. Новгород: изд. ФГОУ ВПО “ВГАВТ”, 2005. Обозначения условные графические в схемах судовых систем и систем энергетических установок. ОСТ 5Р. 5613-2001. Енин В.И., Денисенко Н.И., Костылев И.И. Судовые котельные установки. - М.: Транспорт, 1993. http://www.vsuwt.ru/newsite/departments/library/ http://www.rucont.ru http://elibrary.ru http://biblioclub.ru |