Л абораторная работа 1
 Скачать 1.85 Mb. Скачать 1.85 Mb.
|

Моделирование нелинейных систем автоматического управленияИсследуйте влияние величины входного сигнала Х на колебания нелинейной системы. Выберите соответствующие решатели для моделирования. 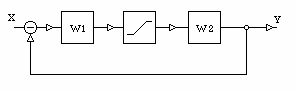 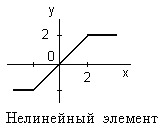 Вариант 1 ____________________________________________________________________________ 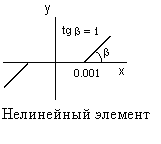 В 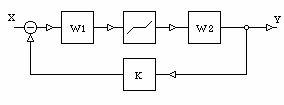 ариант 2 ариант 2K = 2.3  ; T2 = 0.4 c; T3 = 25 мc. ; T2 = 0.4 c; T3 = 25 мc.____________________________________________________________________________ 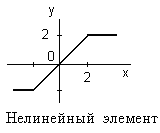 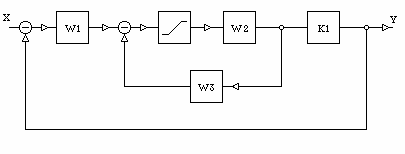 Вариант 3 K1 = 0.005; _ 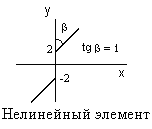 ___________________________________________________________________________ ___________________________________________________________________________В ариант 4K1 = 0.01; _ 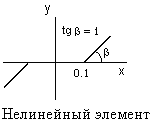 ___________________________________________________________________________ ___________________________________________________________________________ Вариант 5 ; T2 = 0.4 c; T3 = 0.025 c.____________________________________________________________________________ 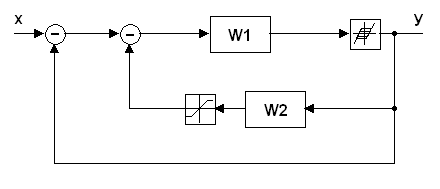 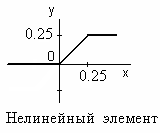 Вариант 6 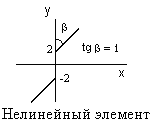 ; T1 = 0.1 c; K1 = 40 ; T1 = 0.1 c; K1 = 40____________________________________________________________________________ В   ариант 7 ариант 7ДОПОЛНЕНИЕ |