Л абораторная работа 1
 Скачать 1.85 Mb. Скачать 1.85 Mb.
|

ДОПОЛНЕНИЕПреобразование координат dq →abc  Гистерезисный ШИМ  Лабораторная работа № 10Моделирование системы векторного управления асинхронным двигателем1) Построить систему векторного управления асинхронным двигателем. Параметры двигателя известны. Четные варианты с разомкнутый ШИМ с вертикальным управлением, нечетные - замкнутый гистерезисный ШИМ. f = 50 Гц; р = 2
2) Проверить как наброс нагрузки влияет на работу двигателя. ДОПОЛНЕНИЕПреобразование координат
Определение тока статора i1q Поток сцепления ротора скольжение  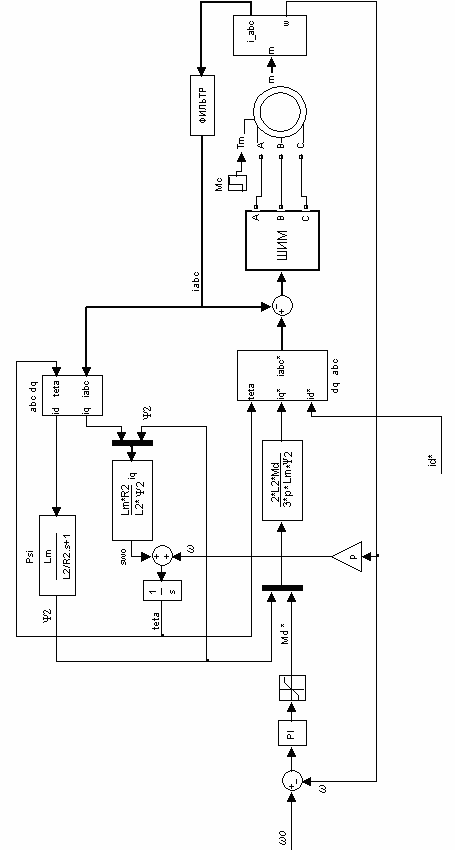 Лабораторная РАБОТА № 11 Моделирование цифровой системы управленияПараметры электрического двигателя известны. 1. Воспользовшись моделью синхронного двигателя с постоянными магнитами в SimPowerSystem, постройте двухконтурную векторную систему подчиненного регулирования с ПИ регулятором (см. рис.). 2. Воспользовшись блоком MATLAB Function замените часть системы управления на “микропроцессорную”. Обратите внимание, как влияет частота дискретизации на характер переходного процесса и установившееся состояние. Параметры электрических двигателей:
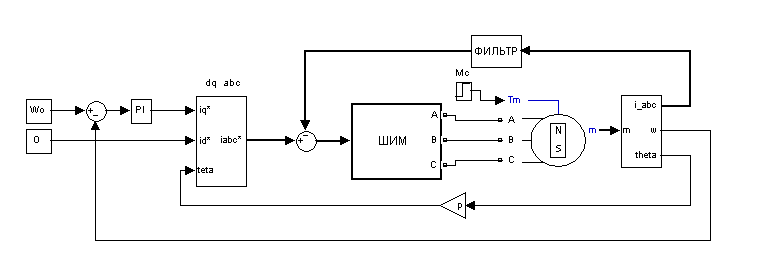 Векторное управление синхронной машины с постоянными магнитами. Схема построена из блоков Simulink и SimPowerSystem. 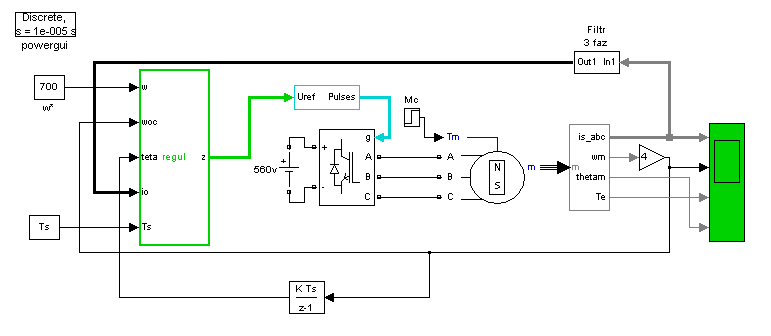 Возможная схема векторного управления синхронной машины с постоянными магнитами с блоком MATLAB Function имитирующим микропроцессорное управление. Период дискретизации Ts. ДОПОЛНЕНИЕ а. Сигнал разности ωо - ω скоростей заданной ωо и скорости двигателя ω, поступает на Pi регулятор. Сигнал на выходе регулятора считается заданным током iq*; ток id* равен нулю. Далее dq токи преобразуются в токи abc. Для этого потребуется электрический угол поворота ротора θе = pθ, где р – число пар полюсов:  б. Пример программы для двухконтурной систему подчиненного регулирования двигателем постоянного тока с ПИ регуляторами: function z = regul(w,woc,i,Ts) - описание функции persistent v1 v2 - объявление глобальных переменных Ki1=78.2847; Ki2=11.8764; - объявление констант Kp1=61.6200; Kp2=370.5724; if isempty(v1,v2) - инициализация устойчивых переменных v1=0; v2=0; end; dw=w-woc; - вычисление разности скоростей x1=v1+dw*Ts; - интегрирование методом Эйлера v1=x1; io=Kp1*dw+Ki1*v1; - пи регулятор первый if io>=40 - ограничение тока io=40; end; if io<=0 io=0; end; di=io-i; - вычисление разности токов x2=v2+di*Ts; - интегирование методом Эйлера v2=x2; uo=Kp2*di+Ki2*v2; - пи регулятор второй if uo<=0 - ограничение напряжения uo=0; end; if uo>=400 uo=400; end; z=uo; - значение напряжения 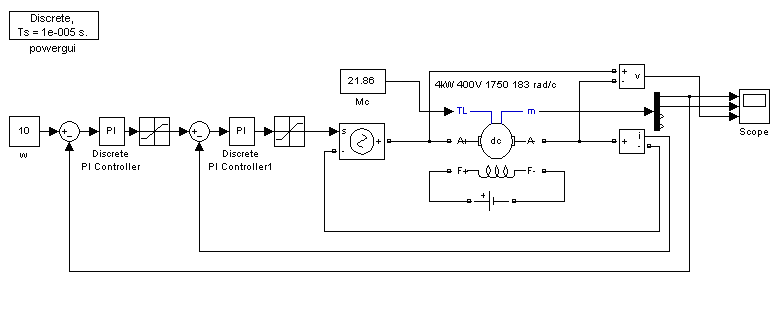 Двухконтурная система подчиненного регулирования двигателем постоянного тока с ПИ регуляторами. Схема построена из блоков Simulink и SimPowerSystem. 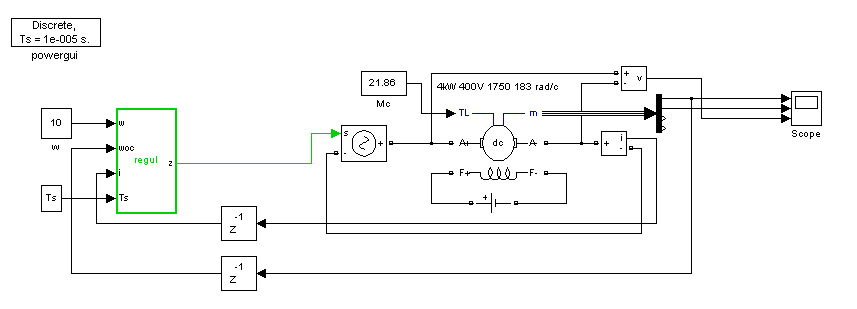 Та же схема с блоком MATLAB Function имитирующим микропроцессорное управление. Период дискретизации Ts. ЗаключениеМы коснулись только основных разделов привода и решали при этом задачи анализа. Не менее важные и, как правило, более сложными являются задачи синтеза – проектирования и разработки новых систем. Автор надеется, что в дальнейшем будут рассмотрены и задачи проектирования. Библиографический список 1. Фурсов, В. Б. Моделирование электропривода [Текст]: учеб. пособие / В.Б. Фурсов - Воронеж: Воронеж. гос. техн. ун-т; 2008. 105 с. 2. Черных, И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSysem и Simulink [Текст]: монография / И. В. Черных – М.ДМК Пресс; СПб.: Питер, 2008. – 288 с 3. Дьяконов, В. Simulink 4. Специальный справочник [Текст]: монография / В. Дьяконов. - СПб: Питер, 2002. – 528 с. 4. Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0 [Текст]: учеб. пособие / С.Г. Герман-Галкин – СПб.: КОРОНА принт, 2001. – 230 с. 5. Power Sysem Blockset . For Use with Simulink. 2001. The Math Works, Inc. [Текст]/ пер. с англ. П. Гнедина, 2006. – 488 с 6. Черных И. В. Simulink: среда создания инженерных приложений [Текст]: монография / И. В. Черных - М.: ДИАЛОГ-МИФИ, 2003. – 496 с  Библиографический список……………………………….………………………………………………………..………. 61 Учебное издание Фурсов Владимир Борисович Моделирование электроприводОВ: ЛАБОРАТОРНЫй практикум В авторской редакции Компьютерный набор В.Б. Фурсова Подписано к изданию 25.09.2014. Объем данных 2,0 Мб ФГБОУ ВПО «Воронежский государственный технический университет» 394026 Воронеж, Московский просп., 14 |