Л абораторная работа 1
 Скачать 1.85 Mb. Скачать 1.85 Mb.
|

Лабораторная работа № 7системы подчиненного регулирования:двигатель постоянного тока; синхронная машина с постоянными магнитамиПостроить систему подчиненного регулирования двигателем постоянного тока (ДПТ). Параметры двигателей приведены в таблице заданий к работе 4. Первоначально настройку можно произвести по упрощенной схеме, используя управляемый источник напряжения, а затем заменить управляемый источник напряжения на управляемый трехфазный тиристорный выпрямитель. Настройка ПИ регуляторов традиционными методами на технический оптимум или симметричный оптимум достаточно трудоемкая задача, поэтому воспользуйтесь значениями пропорциональных коэффициентов kp1 и kp2 в интервале 20 – 5000: пусковой ток в двигателе не должен превышать трехкратного номинального; желательно, чтобы перерегулирование по скорости не превышало 10%, статическая ошибка 1% при минимальном для данного типа двигателя времени переходного процесса; каков диапазон регулирования. Во всем ли диапазоне регулирования удовлетворяется качество регулирования? 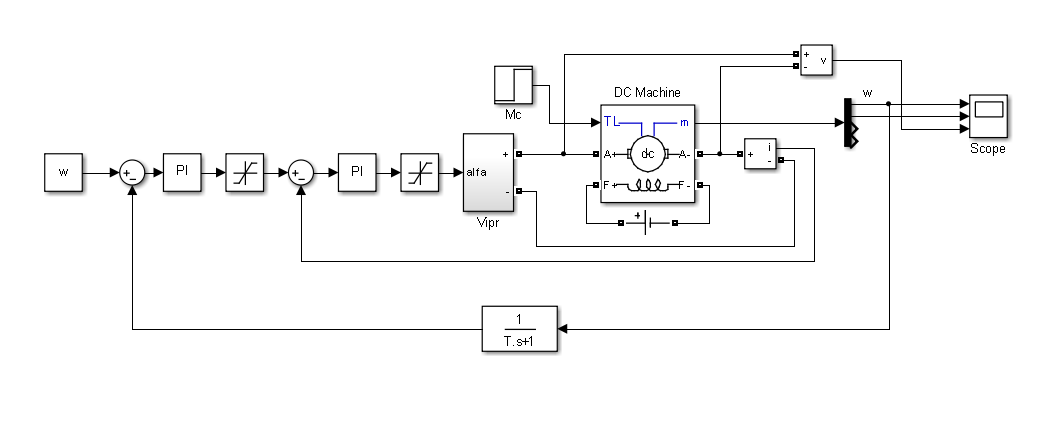 Построить систему подчиненного регулирования синхронным двигателем с постоянными магнитами (СДПМ). Параметры двигателей приведены в таблице заданий к работе 5. 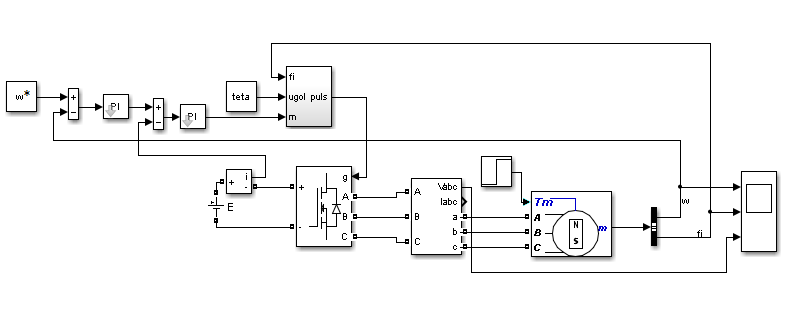 Замечание. В Simulink есть приложения, которые позволяют достаточно точно настроить и оптимизировать и сами регуляторы и выбрать структуру корректирующего устройства, как линейных SISO Design Tool, так и любых Simulink Design Optimization. Это будет изучаться в курсах Автоматизированного роектирвания. Лабораторная РАБОТА № 8Моделирование системы скалярного регулирования асинхронным двигателемПостроить систему скалярного (частотного) регулирования асинхронным двигателем с основными законами управления: Мс = const, P = const и вентилляротная нагрузка. Параметры двигателя известны. Провести численный эксперимент для различных законов регулирования и разных параметрах заданий Мс, Рн и скорости ω. Как ведет себя система при пуске, в установившемся состочнии. f = 50 Гц; р = 2
|