|
|
Л абораторная работа 1
ДОПОЛНЕНИЕ
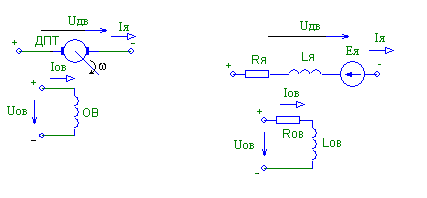
Простейшие уравнения ДПТ включают электрическую и механическую части. На рисунке приведены условное обозначение ДПТ и его электрическая схема замещения. Уравнения двигателя в системе единиц СИ:
электрическая часть
 (1) (1)
механическая часть
 , (2) , (2)
где Lя, Rя – индуктивность и активное сопротивление цепи якоря; может включать в себя не только обмотку якоря, но и дополнительные и компенсационные обмотки; [L] = Гн, [R] = Ом;
Eя(iя) – противоэдс якорной цепи, зависящее от скорости ω и магнитного потока Ф:
обычно можно считать, что
Eя = kФω.
[E] = В; [i] = А; [Ф] = Вб; [ω] = рад/с; [k] = безразмерный;
J – полный момент инерции якоря двигателя и всего, что соединено с осью якоря, приведенное к скорости якоря; [J] = кгм2;
М – момент создаваемый двигателем; т.к. действует на одни и те же проводники с током, то
M = kФiя
Мс – момент сопротивления или нагрузки; [M] = Hм.
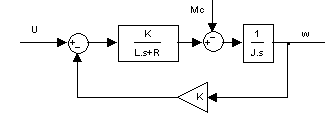
В операторной форме эти два уравнения:
где K = kФ, дают следующую структурную схему:
Двухмассовая нагрузка
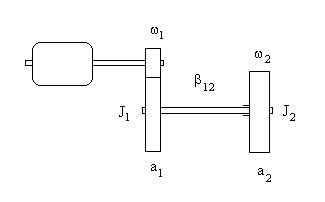
Уравнения Ньютона для этой системы:
где
J – момент инерции первой и второй масс; Мдв – вращающий момент двигателя; а – внешний коэффициент вязкого трения; с – коэффициент упругости вала; β – внутренний коэффициент вязкого трения; Мс – момент сопротивления; ω - угловая скорость; - угол.
Модель нагрузки:
Отметим, что подключение “напрямую” двухмассовой нагрузки к двигателю приведет к ошибке. Дело в том, что момент инерции J1 и момент инерции двигателя Jдв нельзя разделить. Кроме того, именно нагрузкой двигателя является сумма (отрицательная часть первого уравнения) Мс дв =  . .
 Замечание Обозначения ниже из описания SimPowerSystem Замечание Обозначения ниже из описания SimPowerSystem
 DC Machine DC Machine
Машина постоянного тока с независимым возбуждением или возбуждением от постоянного магнита. Обмотку возбуждения (F+, F-) можно подключать параллельно, последовательно и независимо. Цепь якоря (A+, A-) состоит из индуктивности La и резистора Ra, последовательно соединенных с противоэдс E, пропорциональной скорости машины
KE является коэффициентом между напряжением и ω - скоростью машины.
В модели машины постоянного тока с независимым возбуждением КЕ пропорциональна току возбуждения
где Laf является взаимной индуктивностью между якорем и обмоткой возбуждения.
Электромеханический крутящий момент создаваемый машиной постоянного тока пропорционален току якоря Iа
где КТ является постоянной крутящего момента. Соглашение знака для Te
Te > 0 : генератор
Te < 0 : мотор
Момент сухого трения прикладывается внешне TL.
Постоянная крутящего момента равна константе КЕ
KT = KE
Цепь якоря связана между А+ и А- блока DC Machine соединением Series RLC Branch последовательно с регулируемым источником напряжения и блоком Current Measurement.
Цепь возбуждения представлена RL цепью между F + и F - портами блока DC Machine.
Параметры ввода
Show detailed parameters (Показать детализированно параметры)
Если выбрано, маска показывает детальные параметры блока DC Machine. Детальные параметры могут быть изменены независимо заданной модели, которую Вы выбрали в списке Preset Model.
Измерения
Четыре внутренних сигнала выделяются на уровне Simulink:
Скорость ротора в рад/с
Ток якоря в А
Ток возбуждения в А
Электромеханический крутящий момент в Н.м.
Armature resistance and inductance [Ra (ohms) La (H)]
Сопротивление и индуктивность обмотки якоря [Ra (Ом) La (Гн)]
Field resistance and inductance [Rf (ohms) Lf (H)]
Сопротивление и индуктивность обмотки возбуждения [Rf (Ом) Lf (Гн)]
Field-armature mutual inductance Laf (H):
Взаимная индуктивность якоря и обмотки возбуждения Laf (Гн):
Total inertia J (kg.m^2)
Момент инерции J (кг. м2)
Viscous friction coefficient Bm (N.m.s)
Коэффициент вязкого трения (Н.м.с)
Coulomb friction torque Tf (N.m)
Момент сухого трения Tf (Н.м)
Initial speed (rad/s)
Начальная скорость (рад/с)
Определяет начальную скорость машины постоянного тока при моделировании. Чтобы моделировать установившееся состояние, начальное значение крутящего момента на входе TL должно быть пропорционально начальной скорости.
|
|
|
 Скачать 1.85 Mb.
Скачать 1.85 Mb.