Л абораторная работа 1
 Скачать 1.85 Mb. Скачать 1.85 Mb.
|

Моделирование пуска реактивного двигателяЗадание 2В синхронном двигателе с постоянными магнитами ротор заменили анизотропной железной болванкой. Индуктивность по оси q в 10 раз меньше, чем по оси d. Считая, что индуктивность примерно в 10 раз больше, а поток сцепления отсутствует произвести моделирование аналогичное предыдущему случаю. Остальные параметры электрического двигателя не изменились. При каком угле сдвига оси ротора относительно вращающегося поля статора возникает максимальный момент на валу? Как это объяснить? Определить развиваемую мощность. |
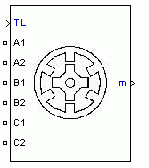 Задание 3
Задание 3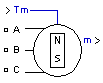
| Lq, Ld | q и d индуктивности по осям q,d |
| R | Сопротивление обмоток статора |
| iq, id | Токи по q и d осям |
| vq, vd | Напряжения по q и d осям |
| ωr | Угловая скорость ротора |
| λ | Амплитуда потока постоянных магнитов ротора в фазах статора |
| p | Число пар полюса |
| Te | Электромагнитный вращающий момент |
Трапециевидная модель электрической системы
Эти уравнения записаны в трехфазных координатах (фаз АВС).
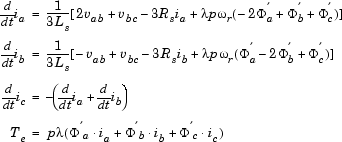
где электродвижущая сила Φ' представлена
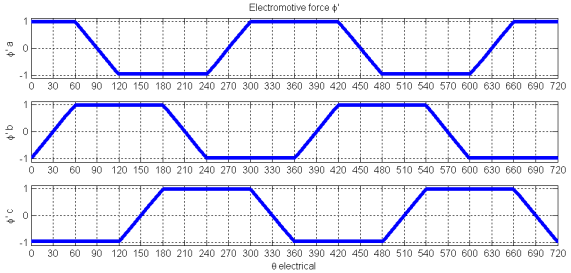
и
| Ls | Индуктивность обмоток статора |
| R | Сопротивление обмоток статора |
| ia, ib, ic | a, b и c фазовые электрические токи |
| Фa', Фb', Фc' | a, b и c фазовые электродвижущие силы |
| vab, vbc | Vab и Vbc линейные напряжения |
| ωr | Угловая скорость ротора |
| λ | Амплитуда потока постоянных магнитов ротора в фазах статора |
| p | Число пар полюса |
| Te | Электромагнитный вращающий момент |
Механическая система (для обеих моделей)
| J | Объединенная инерция ротора и нагрузки |
| F | Объединенное вязкое трение ротора и нагрузки |
| Θ | Угол поворота ротора |
| Tм. | Механический вращающий момент на валу |
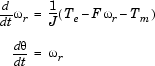
где