Л абораторная работа 1
 Скачать 1.85 Mb. Скачать 1.85 Mb.
|

ДОПОЛНЕНИЕСкалярное регулирование предполагает, фактически, работу системы в установившемся состоянии – в статике. Если обычно при моделировании входное воздействие задавалось скачком, то теперь потребуется устройство плавного пуска – его называют задатчиком интенсивности. В этом случае динамический момент Jdω/dt почти не ощущается при пуске – он много меньше момента нагрузки Мс. Нужно отметить, что линейно нарастающий сигнал по частоте не является наилучшим, т.к. при переходе к установившемуся состоянию происходит скачок скорости, поэтому идеальным сигналом является экспонента плавно переходящая в установившееся состояние. В модели можно использовать функцию пользователя или математические функции, последние работают быстрее. Трем классическим видам нагрузок на валу машины соответствуют следующие законы регулирования, да и то с некоторыми допущениями:  Таким образом, для первого случая – постоянство момента нагрузки – требуется задание напряжения питания инвертора зависящее от частоты 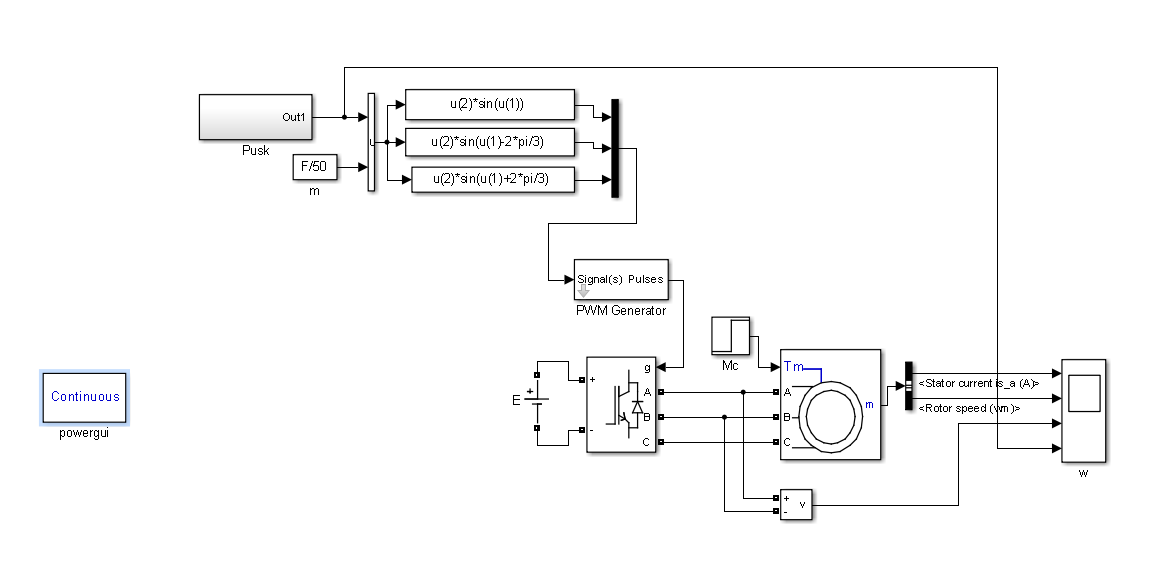 На рисунке одна из возможных моделей скалярного регулирования АД при постоянстве момента нагрузки: блок Pusk – экспоненцтальная кривая плавного изменения угла u(1); m - коэффициент заполнения ШИМ, не должен превышать 1. В данном случае максимальная скорость двигателя 3000 об/мин, поэтому при F = 50 Гц коэффициент заполнения m = 1. Можно сделать регулируемым напряжение питания транзисторного моста Е, но это значительно усложнит схему и теряется преимущество ШИМ. Для упрощения модели величину F вводим в выражения в буквенной форме, а само значение в командном окне Matlab. В двух других законах управления момент нагрузки должен зависеть от скорости вала двигателя, поэтому вводится обратная связь по скорости для момента нагрузки. Лабораторная РАБОТА № 9Моделирование системы векторного управления синхронным двигателем с постоянными магнитами (СДПМ)Построить систему векторного управления синхронным двигателем с постоянными магнитами. Параметры двигателя известны.
В схеме векторного управления СДПМ для создания наибольшего момента используется система координат dq. Ось d направлена по полю постоянного магнита ротора, поэтому ток “катушки d“ устанавливается нулевым, зато ток двигателя должен быть током “катушки q”. Преобразование координат dq →abc создает рабочие токи фаз abc. Обратная связь по току наиболее эффетивна при использовании гистерезисного ШИМ, но можно и обычный PWM генератор. 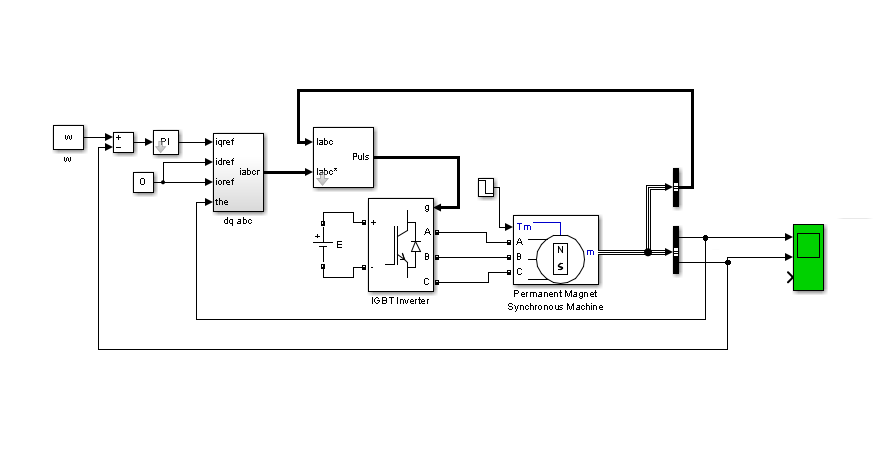 |