Курс лекций ТМФВ курс (Кучерова). Лекция 1. Введение в теорию физической культуры. Основные категории (понятия) физической культуры План лекции
 Скачать 0.96 Mb. Скачать 0.96 Mb.
|

|
Подходы к пониманию механизмов двигательного навыка. К настоящему времени накоплен обширный материал по проблеме построения движений в процессе двигательных действий человека. В разработке проблемы сталкивались и дополняли друг друга различные школы физиологов и психологов. Долгое время между некоторыми из них возникали, казалось бы, непримиримые противоречивые отношения (как, например, между взглядами Н.А.Бернштейна и его последователей, с одной стороны, и сторонников учения И.П.Павлова – с другой). В настоящее время, большинство исследователей пришло к мнению, что по сути дела между этими подходами существенны не столько противоречия, сколько то, что их объединяет и чем они дополняют друг друга. Анализ формирования методологических основ теории обучения двигательным действиям в историческом аспекте важен потому, что позволяет выяснить роль отечественной науки в психолого-педагогических и физиологических концепциях обучения движениям. В первоначальных установках системы обучения движениям лежало подражание. Поэтому в самых ранних дидактических системах подчеркивается необходимость показа и повторения. В России проблему научения с позиции физиологии рассматривал И.М.Сеченов. Он показал, что рефлекс, лежащий в основе двигательного акта, должен быть соотнесен с «чувствованием», которое, по его мнению, «… повсюду имеет значение регулятора движений». Идеи И.М.Сеченова послужили основой работ И.П.Павлова и В.Бехтерева. В лабораториях И.П.Павлова возникла условнорефлекторная теория произвольных движений, на основе которых в дальнейшем развивалось направление по изучению двигательных рефлексов, которые являлись моделью двигательных навыков человека. Учеником Павлова А.Н.Крестовниковым была заложена физиологическая теория двигательного навыка в физическом воспитании и спорте. В его основу легло учение о высшей нервной деятельности, и в частности о "динамическом стереотипе". Им было показано, что в результате повторения формируется динамический стереотип в двигательной зоне больших полушарий. Формирование проходит три стадии: стадия иррадиации – внешне выражается в наличии «лишних» движений; стадия концентрации – процессы возбуждения и торможения концентрируются до оптимальных размеров; стадия стабилизации – стабильно существуют и чередуются очаги возбуждения и торможения в коре головного мозга. Дальнейшее развитие теории двигательного навыка в свете учения Павлова о высшей нервной деятельности продолжал ряд исследователей (М.А.Алексеев, Л.Г.Воронин, Е.Н.Соколов, Н.В.Зимкин, С.В.Янанис, М.В.Тимофеев, В.Д.Мазниченко и другие). Наряду с теорией, объясняющей механизмы двигательных действий с позиции И.П.Павлова о высшей нервной деятельности, развивал свое учение о построении движений и теорию биологической активности Н.А.Бернштейн. Согласно его теории, в основе управления движениями лежит не приспособление к условиям внешней среды, не ответы на внешние стимулы, а осознанное подчинение среды, ее перестройка в соответствии с потребностями индивидуума. Он выдвинул понятие о кольцевом управлении движениями посредствам "сенсорных коррекций". Н.А.Берштейн приходит к выводу, что движение программируется смыслом, который выступает как основа «образа потребного будущего». Н.А.Берштейн не только объяснил принцип управления движением, но и показал механизм его формирования. Формируясь, движение проходит три стадии, для которых характерно: 1)невысокая скорость движений; 2)постепенное исчезновение напряженности, становление четкой мышечной координации, повышение скорости и точности двигательного акта; 3) снижение доли участия активных мышечных усилий в осуществлении движения за счет использования сил тяжести, инерции, центробежных сил, что обеспечивает экономичность энерготрат. К настоящему моменту рефлекторная теория получила дальнейшее развитие в связи с серьезными успехами современной нейрофизиологии и биокибернетики. Наиболее ярко это выражено у П.К.Анохина в его концепции функциональных систем поведенческих актов. П.К.Анохин обосновал понятия «акцептора действия» и «обратной афферентации», что позволило объяснить способность предвидеть результат действия и корректировать его по ходу выполнения. Концепция функциональных систем поведенческих актов объясняет проявление целой совокупности функциональных механизмов и процессов, складывающихся в ходе и в результате построения действия при ведущей роли высших отделов центральной нервной системы (ЦНС) и обеспечивающих консолидацию функций всех организменных систем, участвующих в его осуществлении, в том числе физиологических механизмов программирования действия, эффекторных и обратных связей в управлении движениями, сличении параметров действия с заданной программой, выявления рассогласований и коррекции действия. Различные подходы к рассмотрению механизмов формирования и проявления двигательных умений и навыков не исключают, а дополняют друг друга. Учение о кольцевом управлении движениями Н.А.Бернштейна и теория функциональных систем П.К.Анохина представляют собой дальнейшее развитие биокибернетических представлений о вскрытых школой И.П.Павлова закономерностях центральной регуляции рефлекторной деятельности. Для современного понимания механизмов двигательного навыка характерно следующее.
2. Перенос двигательных умений и навыков и его виды Весьма существенное значение для рационального построения процесса обучения двигательным действиям имеют закономерности так называемого переноса двигательных умений и навыков. Любое двигательное умение или навык формируется не на пустом месте, а всегда включает в себя те либо иные компоненты других, ранее сложившихся умений и навыков, которые влияют определенным образом на становление и проявление нового умения или навыка. Все эти отношения могут иметь различный характер: быть односторонне направленными и обоюдными, положительными и отрицательными, прямыми и косвенными. Различают два типа переноса навыков. Первый такой тип – когда процесс обучения навыку облегчает обучение тому же самому навыку, но выполняемому другой частью тела. Например, если двигательный навык (скажем, ведение мяча) усвоен одной рукой, то другая рука тоже овладеет этим навыком без упражнения. Данное благоприятное явление установлено для переноса двигательного навыка с ведущей (чаще правой) руки на другую (неведущую, чаще левую). Но как быть в случае с переносом навыка с неведущей (левой) руки на ведущую (правую)? Касается ли процесс переноса навыка не только рук, но и ног, и других частей тела? Эти вопросы, пожалуй, впервые отчетливо сформулировал В.В.Белинович еще в 1949 г. в своей капитальной монографии «Обучение физическим упражнениям» (М.: ФиС, М. –Л., С. 25–29) – вопросы, на которые еще до сих пор не найдены окончательные ответы. Второй тип переноса навыков – когда обучение одному навыку влияет на обучение другому навыку. Такое влияние может быть положительным, отрицательным и нейтральным. Во всех отраслях практической педагогики, в частности в процессе физического воспитания при обучении двигательным действиям, стараются максимально использовать «положительный перенос». Например, навыки метания камней, снежков, малого мяча помогают освоить метание спортивных снарядов (копья, гранаты). Положительным переносом навыков называется такое их взаимодействие, при котором ранее сформированное умение или навык содействуют формированию, становлению других, облегчают процесс изучения и совершенствования последующих двигательных действий. Например, навык метания малого теннисного мяча помогает освоить метание копья. Отрицательным переносом навыков называется такое их взаимодействие, при котором ранее сформированное умение или навык препятствуют формированию других, вносят в них искажения, как бы конкурируют с ними, тем самым затрудняют процесс изучения и закрепления последующих двигательных действий (интерфекренция). Например, навык выполнения сальто назад в спортивной акробатике может замедлить освоение переворота назад, или, например, в легкой атлетике бегунам на средние дистанции не рекомендуется развивать свои функциональные возможности в упражнениях педалирования на велоэргометре в силу различных двигательных и координационных структур циклических навыков. Односторонний перенос навыков проявляется в тех случаях, когда формирование одного навыка содействует становлению другого, а обратного влияния не обнаруживается. Взаимный перенос навыков приводит к ускоренному освоению двигательных навыков в условиях взаимного двустороннего влияния, когда наблюдаются обоюдное совершенствование координационных и двигательных структур. Прямой перенос навыка характеризуется тем, что формирование одного навыка оказывает непосредственное влияние на становление другого в движениях со сходной координационной и двигательной структурой. Косвенный (опосредованный) перенос навыков – результат формирования навыка вначале не обнаруживается, а затем, спустя некоторое время, эффект проявляется через промежуточные связи — например, использование средств ОФП в целях увеличения базы неспецифических двигательных умений и навыков в избранном виде спорта на этапе начальной подготовки. Тип переноса двигательных умений и навыков зависит как от особенностей содержания и структуры двигательных действий, а так же от стадии и условий их формирования. Вероятность положительного переноса тем больше, чем значительнее сходство смысловой основы и главных звеньев техники двигательных действий. Исходя из этого, учебный материал необходимо группировать и последовательно распределять в зависимости от степени существенной общности двигательных действий - по смысловой основе, по структуре, чтобы по возможности максимально использовать положительный перенос умений, навыков, и исключить тормозящий эффект отрицательного переноса. Характер взаимодействия навыков необходимо учитывать:
На различных стадиях формирования двигательных умений и навыков возможность переноса неодинакова. В начале формирования двигательного умения перенос осуществляется преимущественно на уровне ООД, при этом возможности переноса увеличиваются в случае, когда ООД достаточно полная и обобщенная. По мере формирования и упрочения двигательного навыка возрастающую роль в его положительных или отрицательных взаимодействиях с другими навыками играет степень совпадения или различий двигательных автоматизмов, входящих в их состав. В зависимости от стадии формирования двигательных действий может меняться характер переноса умений и навыков. К примеру, проявлявшийся вначале отрицательный перенос навыка может быть, по мере его упрочения, исключен и в дальнейшем превращен в положительный фактор. Так, при одновременном формировании навыков в таких легкоатлетических упражнениях, как прыжок в высоту перешагиванием и барьерный бег, в начальном периоде обычно наблюдаются отрицательные взаимовлияния, однако затем сформированные навыки дифференцируются и не вступают в отрицательные взаимодействия. Все это означает, что перенос умений и навыков было бы неверно рассматривать как нечто неизменное. Одна из центральных проблем теории и практики обучения двигательным действиям состоит именно в том, чтобы полноценно использовать эффект положительного переноса двигательных умений и навыков, ограничить эффект отрицательного переноса и превратить его по возможности в позитивный фактор. Решение этой непростой проблемы предполагает тщательное программирование учебного материала с учетом закономерностей переноса двигательных умений и навыков, соблюдение определенного порядка в сочетании и распределении упражнений во времени, оптимальное построение процесса обучения двигательным действиям в целом. 3. Предпосылки и структура процесса обучения Процесс обучения и совершенствования двигательного действия принято представлять как последовательный переход от знаний и представлений о действии к умению выполнить его, а затем от умения к навыку. Естественно, что возможность научиться рациональным двигательным действиям связана с полнотой знаний о выполняемом движении, но превращение знаний в действие может произойти лишь на основе его практического выполнения. В любом действии можно выделить при укрупнении три части: ориентировочную, собственно-иснолнительную и контрольную (М. Я, Гальперин и др.), которые реально неотделимы друг от друга, одновременно представлены в процессе его выполнения. 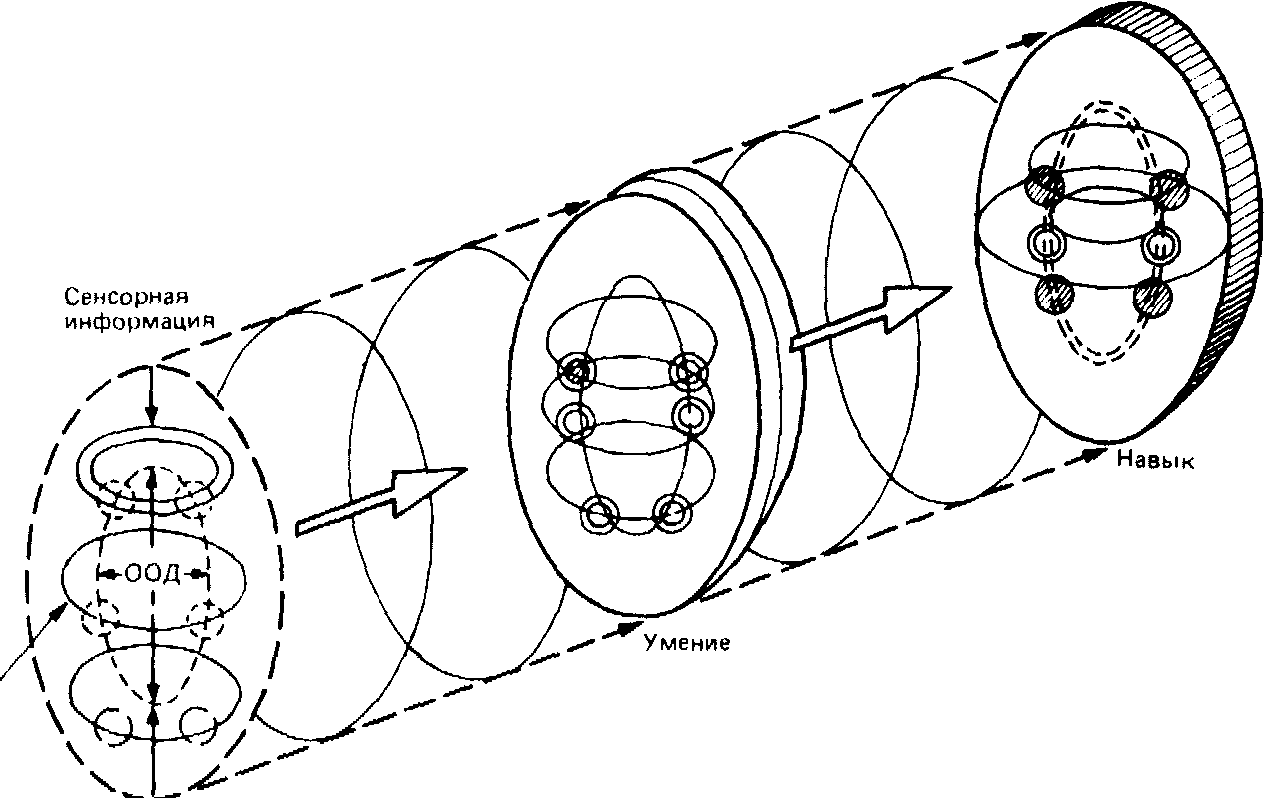 Двигательный опыт Рис. 1. Схема формирования двигательного действия как процесса перехода от его исходных предпосылок к двигательному умению и навыку; ООД - ориентировочная основа действия, вокруг обозначающего ее контура малыми кругами показаны входящие в нее «опорные точки» (незаштрихованные — осознаваемые, заштрихованные – выполняемые на уровне подсознания). Осмысленное построение действия начинается с направленного формирования его ориентировочной части - ориентировочной основы действия (ООД). Полноценная ООД возникает в том случае, если в нее включаются необходимые и достаточные представления о задаче, способе и условиях выполнения движения, конкретизированные в виде основных опорных точек - ООТ. Основные опорные точки» (ООТ) – это объекты, требующие концентрации внимания при исполнении действия, то есть те элементы изучаемого действия, на которые должен обратить внимание ученика учитель. Согласно М.М.Богену, сюда относятся не только особенности двигательного действия, но и особенности условий двигательной задачи: жесткость опоры, свойства снарядов, поведение соперника и т.п. Совокупность ООТ, составляющую программу действия, П.Я.Гальперин и М.М.Боген называют «ориентировочной основой действия» (ООД). Например, основные опорные точки при изучении техники старта и стартового разгона в легкой атлетике – ООТ-1: первоочередный отрыв рук от опоры в момент старта; ООТ-2: мощное отталкивание двумя ногами; ООТ-3: опережающая быстрая постановка на дорожку задней опорной ноги с минимально возможным сгибанием в колене и низким проносом стопы и др. Изучение основ техники спринтерского бега предусматривает формирование следующих опорных точек: ООТ-1: Соблюдать правильную осанку (динамическую позу) в беге, при которой голова поднята, взгляд направлен в сторону финиша, выпрямленное туловище слегка наклонено вперед так, чтобы тяжесть тела при постановке ног ощущалась на кончиках пальцев; стопы ставить носками прямо-вперед, движение идет по прямой линии без отклонений; ООТ-2: Руки, согнутые в локтевых суставах, быстро движутся вперед-назад в едином ритме с движением ног; перекрестное активное движение локтевого сустава вперед несколько внутрь, назад – несколько наружу; кисти рук полусжаты или разомкнуты; энергичные движения руками не должны вызывать подъем плеч и сутулость; ООТ-3: Опускать ноги на дорожку быстро, с энергичным сведением бедер; активным маховым движением бедра вниз-назад пружинистая постановка, ближе к проекции ОЦТ, взятой «на себя» стопы; отталкиваясь стопой, активно проводить ногу назад, как бы продвигая загребающим движением подвижную дорожку. При стихийном формировании действия путем проб и ошибок выработка относительно целесообразной ООД происходит замедленно, с излишними затратами времени и сил; при системно организованном же обучении сроки формирования ООД сокращаются, она приобретает полноценные качества, что решающим образом сказывается на всем процессе формирования действия и его эффективности. Важное значение в создании ориентировочной основы двигательного действия имеет ранее накопленный двигательный опыт, идеомоторные представления и кинестетические ощущения, появляющиеся уже при первых попытках выполнения действия. Если сформирована достаточно полная ООД и созданы другие необходимые предпосылки к овладению действием, оно может быть совершенно, хотя бы в упрощенной форме. Обычно двигательное действие выполняется вначале с повышенным напряжением и лишними движениями, вынужденными задержками, скованно и замедленно по сравнению с его целевыми параметрами. Это обусловлено неотлаженностью операций и отсутствием прочных связей между ними, необходимостью детально контролировать движения и концентрировать внимание на всех опорных точках ООД, а также другими особенностями управления движениями, характерными для начальной стадии формирования двигательного действия. В этой стадии действие воспроизводится со значительными отклонениями от заданной программы (т.е. неоправданно вариативно), относительно легко нарушается под влиянием различного рода сбивающих факторов (в частности при изменении внешних условий, под влиянием утомления и даже при сравнительно небольших перерывах в повторении действия). |