Лекции_Вычислительные машины_new. Лекция История развития вычислительной техники
 Скачать 5.16 Mb. Скачать 5.16 Mb.
|

Многопроцессорные системы с локальной памятью и многомашинные системыСуществуют два различных способа построения крупномасштабных систем с распределенной памятью. Простейший способ заключается в том, чтобы исключить аппаратные механизмы, обеспечивающие когерентность кэш-памяти, и сосредоточить внимание на создании масштабируемой системы памяти. Несколько компаний разработали такого типа машины. Наиболее известным примером такой системы является компьютер T3D компании Cray Research. В этих машинах память распределяется между узлами (процессорными элементами) и все узлы соединяются между собой посредством того или иного типа сети. Доступ к памяти может быть локальным или удаленным. Специальные контроллеры, размещаемые в узлах сети, могут на основе анализа адреса обращения принять решение о том, находятся ли требуемые данные в локальной памяти данного узла, или размещаются в памяти удаленного узла. В последнем случае контроллеру удаленной памяти посылается сообщение для обращения к требуемым данным. Чтобы обойти проблемы когерентности, разделяемые (общие) данные не кэшируются. Конечно, с помощью программного обеспечения можно реализовать некоторую схему кэширования разделяемых данных путем их копирования из общего адресного пространства в локальную память конкретного узла. В этом случае когерентностью памяти также будет управлять программное обеспечение. Преимуществом такого подхода является практически минимальная необходимая поддержка со стороны аппаратуры, хотя наличие, например, таких возможностей как блочное (групповое) копирование данных было бы весьма полезным. Недостатком такой организации является то, что механизмы программной поддержки когерентности подобного рода кэш-памяти компилятором весьма ограничены. Существующая в настоящее время методика в основном подходит для программ с хорошо структурированным параллелизмом на уровне программного цикла. Машины с архитектурой, подобной Cray T3D, называют процессорами (машинами) с массовым параллелизмом (MPP Massively Parallel Processor). К машинам с массовым параллелизмом предъявляются взаимно исключающие требования. Чем больше объем устройства, тем большее число процессоров можно расположить в нем, тем длиннее каналы передачи управления и данных, а значит и меньше тактовая частота. Происшедшее возрастание нормы массивности для больших машин до 512 и даже 64К процессоров обусловлено не ростом размеров машины, а повышением степени интеграции схем, позволившей за последние годы резко повысить плотность размещения элементов в устройствах. Топология сети обмена между процессорами в такого рода системах может быть различной. На рис. 10.5 приведены характеристики сети обмена для некоторых коммерческих MPP. Для построения крупномасштабных систем альтернативой рассмотренному в предыдущем разделе протоколу наблюдения может служить протокол на основе справочника, который отслеживает состояние кэшей. Такой подход предполагает, что логически единый справочник хранит состояние каждого блока памяти, который может кэшироваться. В справочнике обычно содержится информация о том, в каких кэшах имеются копии данного блока, модифицировался ли данный блок и т.д. В существующих реализациях этого направления справочник размещается рядом с памятью. Имеются также протоколы, в которых часть информации размещается в кэш-памяти. Положительной стороной хранения всей информации в едином справочнике является простота протокола, связанная с тем, что вся необходимая информация сосредоточена в одном месте. Недостатком такого рода справочников является его размер, который пропорционален общему объему памяти, а не размеру кэш-памяти. Это не составляет проблемы для машин, состоящих, например, из нескольких сотен процессоров, поскольку связанные с реализацией такого справочника накладные расходы можно преодолеть. Но для машин большего размера необходима методика, позволяющая эффективно масштабировать структуру справочника.
Рис. 10.5. Характеристики межсоединений некоторых коммерческих MPP 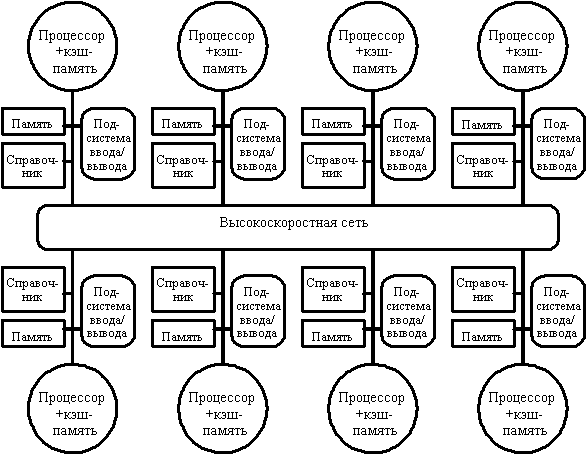 Рис. 10.6. Архитектура системы с распределенной внешней памятью и распределенным по узлам справочником ТЕМА 9. Организация микроконтроллеров Лекция 20: Многопроцессорное ядро и память микроконтроллера Основной особенностью современного этапа развития МПС является завершение перехода от систем, выполненных на основе нескольких больших ИС, к однокристальным МК, которые объединяют в одном кристалле все основные элементы МПС: центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), порты ввода/выводы, таймеры. 4.1. Классификация и структура микроконтроллеров В настоящее время выпускается целый ряд типов МК. Все эти приборы можно условно разделить на три основных класса: 8-разрядные МК для встраиваемых приложений; 16- и 32-разрядные МК; цифровые сигнальные процессоры (DSP). Наиболее распространенным представителем семейства МК являются 8-разрядные приборы, широко используемые в промышленности, бытовой и компьютерной технике. Они прошли в своем развитии путь от простейших приборов с относительно слаборазвитой периферией до современных многофункциональных контроллеров, обеспечивающих реализацию сложных алгоритмов управления в реальном масштабе времени. Причиной жизнеспособности 8-разрядных МК является использование их для управления реальными объектами, где применяются, в основном, алгоритмы с преобладанием логических операций, скорость обработки которых практически не зависит от разрядности процессора. Росту популярности 8-разрядных МК способствует постоянное расширение номенклатуры изделий, выпускаемых такими известными фирмами, как Motorola, Microchip, Intel, Zilog, Atmel и многими другими. Современные 8-разрядные МК обладают, как правило, рядом отличительных признаков. Перечислим основные из них: модульная организация, при которой на базе одного процессорного ядра (центрального процессора) проектируется ряд (линейка) МК, различающихся объемом и типом памяти программ, объемом памяти данных, набором периферийных модулей, частотой синхронизации; использование закрытой архитектуры МК, которая характеризуется отсутствием линий магистралей адреса и данных на выводах корпуса МК. Таким образом, МК представляет собой законченную систему обработки данных, наращивание возможностей которой с использованием параллельных магистралей адреса и данных не предполагается; использование типовых функциональных периферийных модулей (таймеры, процессоры событий, контроллеры последовательных интерфейсов, аналого-цифровые преобразователи и др.), имеющих незначительные отличия в алгоритмах работы в МК различных производителей; расширение числа режимов работы периферийных модулей, которые задаются в процессе инициализации регистров специальных функций МК. При модульном принципе построения все МК одного семейства содержат процессорное ядро, одинаковое для всех МК данного семейства, и изменяемый функциональный блок, который отличает МК разных моделей. Структура модульного МК приведена на рис. 4.1. Процессорное ядро включает в себя: центральный процессор; внутреннюю контроллерную магистраль (ВКМ) в составе шин адреса, данных и управления; схему синхронизации МК; схему управления режимами работы МК, включая поддержку режимов пониженного энергопотребления, начального запуска (сброса) и т.д. Изменяемый функциональный блок включает в себя модули памяти различного типа и объема, порты ввода/вывода, модули тактовых генераторов (Г), таймеры. В относительно простых МК модуль обработки прерываний входит в состав процессорного ядра. В более сложных МК он представляет собой отдельный модуль с развитыми возможностями. В состав изменяемого функционального блока могут входить и такие дополнительные модули как компараторы напряжения, аналого-цифровые преобразователи (АЦП) и другие. Каждый модуль проектируется для работы в составе МК с учетом протокола ВКМ. Данный подход позволяет создавать разнообразные по структуре МК в пределах одного семейства. 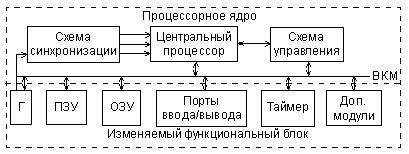 Рис. 4.1. Модульная организация МК. 4.2. Процессорное ядро микроконтроллера 4.2.1. Структура процессорного ядра МК Основными характеристиками, определяющими производительность процессорного ядра МК, являются: набор регистров для хранения промежуточных данных; система команд процессора; способы адресации операндов в пространстве памяти; организация процессов выборки и исполнения команды. С точки зрения системы команд и способов адресации операндов процессорное ядро современных 8-разрядных МК реализует один из двух принципов построения процессоров: процессоры с CISC-архитектурой, реализующие так называемую полную систему команд (Complicated Instruction Set Computer); процессоры с RISC-архитектурой, реализующие сокращенную систему команд (Reduced Instruction Set Computer). CISC-процессоры выполняют большой набор команд с развитыми возможностями адресации, давая разработчику возможность выбрать наиболее подходящую команду для выполнения необходимой операции. В применении к 8-разрядным МК процессор с CISC-архитектурой может иметь однобайтовый, двухбайтовый и трехбайтовый (редко четырехбайтовый) формат команд. При этом система команд, как правило, неортогональна, то есть не все команды могут использовать любой из способов адресации применительно к любому из регистров процессора. Выборка команды на исполнение осуществляется побайтно в течение нескольких циклов работы МК. Время выполнения команды может составлять от 1 до 12 циклов. К МК с CISC-архитектурой относятся МК фирмы Intel с ядром MCS-51, которые поддерживаются в настоящее время целым рядом производителей, МК семейств НС05, НС08 и НС11 фирмы Motorola и ряд других. В процессорах с RISC-архитектурой набор исполняемых команд сокращен до минимума. Для реализации более сложных операций приходится комбинировать команды. При этом все команды имеют формат фиксированной длины (например, 12, 14 или 16 бит), выборка команды из памяти и ее исполнение осуществляется за один цикл (такт) синхронизации. Система команд RISC-процессора предполагает возможность равноправного использования всех регистров процессора. Это обеспечивает дополнительную гибкость при выполнении ряда операций. К МК с RISC-процессором относятся МК AVR фирмы Atmel, МК PIC16 и PIC17 фирмы Microchip и другие. На первый взгляд, МК с RISC-процессором должны иметь более высокую производительность по сравнению с CISC МК при одной и той же тактовой частоте внутренней магистрали. Однако на практике вопрос о производительности более сложен и неоднозначен. Во-первых, оценка производительности МК по времени выполнения команд различных систем (RISC и CISC) не совсем корректна. Обычно производительность МП и МК принято оценивать числом операций пересылки «регистр-регистр», которые могут быть выполнены в течение одной секунды. В МК с CISC-процессором время выполнения операции «регистр-регистр» составляет от 1 до 3 циклов, что, казалось бы, уступает производительности МК с RISC-процессором. Однако стремление к сокращению формата команд при сохранении ортогональности системы команд RISC-процессора приводит к вынужденному ограничению числа доступных в одной команде регистров. Так, например, системой команд МК PIC16 предусмотрена возможность пересылки результата операции только в один из двух регистров — регистр-источник операнда f или рабочий регистр W. Таким образом, операция пересылки содержимого одного из доступных регистров в другой (не источник операнда и не рабочий) потребует использования двух команд. Такая необходимость часто возникает при пересылке содержимого одного из регистров общего назначения (РОН) в один из портов МК. В то же время, в системе команд большинства CISC-процессоров присутствуют команды пересылки содержимого РОН в один из портов ввода/вывода. То есть более сложная система команд иногда позволяет реализовать более эффективный способ выполнения операции. Во-вторых, оценка производительности МК по скорости пересылки «регистр-регистр» не учитывает особенностей конкретного реализуемого алгоритма управления. Так, при разработке быстродействующих устройств автоматизированного управления основное внимание следует уделять времени выполнения операций умножения и деления при реализации уравнений различных передаточных функций. А при реализации пульта дистанционного управления бытовой техникой следует оценивать время выполнения логических функций, которые используются при опросе клавиатуры и генерации последовательной кодовой посылки управления. Поэтому в критических ситуациях, требующих высокого быстродействия, следует оценивать производительность на множестве тех операций, которые преимущественно используются в алгоритме управления и имеют ограничения по времени выполнения. В-третьих, необходимо еще учитывать, что указанные в справочных данных на МК частоты синхронизации обычно соответствуют частоте подключаемого кварцевого резонатора, в то время как длительность цикла центрального процессора определяется частотой обмена по ВКМ. Соотношение этих частот индивидуально для каждого МК и должно быть принято в расчет при сравнении производительности различных моделей контроллеров. С точки зрения организации процессов выборки и исполнения команды в современных 8-разрядных МК применяется одна из двух уже упоминавшихся архитектур МПС: фон-неймановская (принстонская) или гарвардская. Основной особенностью фон-неймановской архитектуры является использование общей памяти для хранения программ и данных, как показано на рис. 4.2. 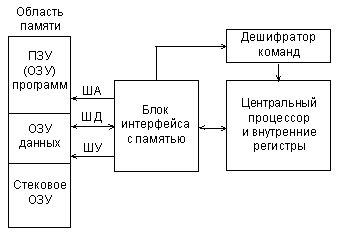 Рис. 4.2. Структура МПС с фон-неймановской архитектурой. Основное преимущество архитектуры Фон-Неймана – упрощение устройства МПС, так как реализуется обращение только к одной общей памяти. Кроме того, использование единой области памяти позволяло оперативно перераспределять ресурсы между областями программ и данных, что существенно повышало гибкость МПС с точки зрения разработчика программного обеспечения. Размещение стека в общей памяти облегчало доступ к его содержимому. Неслучайно поэтому фон-неймановская архитектура стала основной архитектурой универсальных компьютеров, включая персональные компьютеры. Основной особенностью гарвардской архитектуры является использование раздельных адресных пространств для хранения команд и данных, как показано на рис. 4.3. 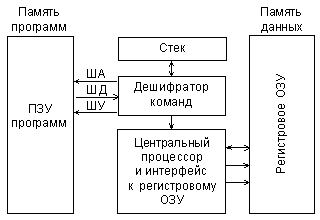 Рис. 4.3. Структура МПС с гарвардской архитектурой Гарвардская архитектура почти не использовалась до конца 70-х годов, пока производители МК не поняли, что она дает определенные преимущества разработчикам автономных систем управления. Дело в том, что, судя по опыту использования МПС для управления различными объектами, для реализации большинства алгоритмов управления такие преимущества фон-неймановской архитектуры как гибкость и универсальность не имеют большого значения. Анализ реальных программ управления показал, что необходимый объем памяти данных МК, используемый для хранения промежуточных результатов, как правило, на порядок меньше требуемого объема памяти программ. В этих условиях использование единого адресного пространства приводило к увеличению формата команд за счет увеличения числа разрядов для адресации операндов. Применение отдельной небольшой по объему памяти данных способствовало сокращению длины команд и ускорению поиска информации в памяти данных. Кроме того, гарвардская архитектура обеспечивает потенциально более высокую скорость выполнения программы по сравнению с фон-неймановской за счет возможности реализации параллельных операций. Выборка следующей команды может происходить одновременно с выполнением предыдущей, и нет необходимости останавливать процессор на время выборки команды. Этот метод реализации операций позволяет обеспечивать выполнение различных команд за одинаковое число тактов, что дает возможность более просто определить время выполнения циклов и критичных участков программы. Большинство производителей современных 8-разрядных МК используют гарвардскую архитектуру. Однако гарвардская архитектура является недостаточно гибкой для реализации некоторых программных процедур. Поэтому сравнение МК, выполненных по разным архитектурам, следует проводить применительно к конретному приложению. 4.2.2. Система команд процессора МК Так же, как и в любой микропроцессорной системе, набор команд процессора МК включает в себя четыре основные группы команд: команды пересылки данных; арифметические команды; логические команды; команды переходов. Для реализации возможности независимого управления разрядами портов (регистров) в большинстве современных МК предусмотрена также группа команд битового управления (булевый или битовый процессор). Наличие команд битового процессора позволяет существенно сократить объем кода управляющих программ и время их выполнения. В ряде МК выделяют также группу команд управления ресурсами контроллера, используемую для настройки режимов работы портов ввода/вывода, управления таймером и т.п. В большинстве современных МК внутренние ресурсы контроллера отображаются на память данных, поэтому для целей управления ресурсами используются команды пересылки данных. Система команд МК по сравнению с системой команд универсального МП имеет, как правило, менее развитые группы арифметических и логических команд, зато более мощные группы команд пересылки данных и управления. Эта особенность связана со сферой применения МК, требующей, прежде всего, контроля окружающей обстановки и формирования управляющих воздействий. 4.2.3. Схема синхронизации МК Схема синхронизации МК обеспечивает формирование сигналов синхронизации, необходимых для выполнения командных циклов центрального процессора, а также обмена информацией по внутренней магистрали. В зависимости от исполнения центрального процессора командный цикл может включать в себя от одного до нескольких (4 – 6) тактов синхронизации. Схема синхронизации формирует также метки времени, необходимые для работы таймеров МК. В состав схемы синхронизации входят делители частоты, которые формируют необходимые последовательности синхросигналов. Лекция 21: Память программ и данных МК В МК используется три основных вида памяти. Память программ представляет собой постоянную память (ПЗУ), предназначенную для хранения программного кода (команд) и констант. Ее содержимое в ходе выполнения программы не изменяется. Память данных предназначена для хранения переменных в процессе выполнения программы и представляет собой ОЗУ. Регистры МК – этот вид памяти включает в себя внутренние регистры процессора и регистры, которые служат для управления периферийными устройствами (регистры специальных функций). 4.3.1. Память программ Основным свойством памяти программ является ее энергонезависимость, то есть возможность хранения программы при отсутствии питания. С точки зрения пользователей МК следует различать следующие типы энергонезависимой памяти программ: ПЗУ масочного типа – mask-ROM. Содержимое ячеек ПЗУ этого типа заносится при ее изготовлении с помощью масок и не может быть впоследствии заменено или допрограммировано. Поэтому МК с таким типом памяти программ следует использовать только после достаточно длительной опытной эксплуатации. Основным недостатком данной памяти является необходимость значительных затрат на создание нового комплекта фотошаблонов и их внедрение в производство. Обычно такой процесс занимает 2-3 месяца и является экономически выгодным только при выпуске десятков тысяч приборов. ПЗУ масочного типа обеспечивают высокую надежность хранения информации по причине программирования в заводских условиях с последующим контролем результата. ПЗУ, программируемые пользователем, с ультрафиолетовым стиранием — EPROM (Erasable Programmable ROM). ПЗУ данного типа программируются электрическими сигналами и стираются с помощью ультрафиолетового облучения. Ячейка памяти EPROM представляет собой МОП-транзистор с «плавающим» затвором, заряд на который переносится с управляющего затвора при подаче соответствующих электрических сигналов. Для стирания содержимого ячейки она облучается ультрафиолетовым светом, который сообщает заряду на плавающем затворе энергию, достаточную для преодоления потенциального барьера и стекания на подложку. Этот процесс может занимать от нескольких секунд до нескольких минут. МК с EPROM допускают многократное программирование и выпускаются в керамическом корпусе с кварцевым окошком для доступа ультрафиолетового света. Такой корпус стоит довольно дорого, что значительно увеличивает стоимость МК. Для уменьшения стоимости МК с EPROM его заключают в корпус без окошка (версия EPROM с однократным программированием). ПЗУ, однократно программируемые пользователем, — OTPROM (One-Time Programmable ROM). Представляют собой версию EPROM, выполненную в корпусе без окошка для уменьшения стоимости МК на его основе. Сокращение стоимости при использовании таких корпусов настолько значительно, что в последнее время эти версии EPROM часто используют вместо масочных ПЗУ. ПЗУ, программируемые пользователем, с электрическим стиранием — EEPROM (Electrically Erasable Programmable ROM). ПЗУ данного типа можно считать новым поколением EPROM, в которых стирание ячеек памяти производится также электрическими сигналами за счет использования туннельных механизмов. Применение EEPROM позволяет стирать и программировать МК, не снимая его с платы. Таким способом можно производить отладку и модернизацию программного обеспечения. Это дает огромный выигрыш на начальных стадиях разработки микроконтроллерных систем или в процессе их изучения, когда много времени уходит на поиск причин неработоспособности системы и выполнение циклов стирания-программирования памяти программ. По цене EEPROM занимают среднее положение между OTPROM и EPROM. Технология программирования памяти EEPROM допускает побайтовое стирание и программирование ячеек. Несмотря на очевидные преимущества EEPROM, только в редких моделях МК такая память используется для хранения программ. Связано это с тем, что, во-первых, EEPROM имеют ограниченный объем памяти. Во-вторых, почти одновременно с EEPROM появились Flash-ПЗУ, которые при сходных потребительских характеристиках имеют более низкую стоимость; ПЗУ с электрическим стиранием типа Flash — Flash-ROM. Функционально Flash-память мало отличается от EEPROM. Основное различие состоит в способе стирания записанной информации. В памяти EEPROM стирание производится отдельно для каждой ячейки, а во Flash-памяти стирать можно только целыми блоками. Если необходимо изменить содержимое одной ячейки Flash-памяти, потребуется перепрограммировать весь блок. Упрощение декодирующих схем по сравнению с EEPROM привело к тому, что МК с Flash-памятью становятся конкурентоспособными по отношению не только к МК с однократно программируемыми ПЗУ, но и с масочными ПЗУ также. 4.3.2. Память данных Память данных МК выполняется, как правило, на основе статического ОЗУ. Термин «статическое» означает, что содержимое ячеек ОЗУ сохраняется при снижении тактовой частоты МК до сколь угодно малых значений (с целью снижения энергопотребления). Большинство МК имеют такой параметр, как «напряжение хранения информации» — USTANDBY. При снижении напряжения питания ниже минимально допустимого уровня UDDMIN, но выше уровня USTANDBY работа программы МК выполняться не будет, но информация в ОЗУ сохраняется. При восстановлении напряжения питания можно будет сбросить МК и продолжить выполнение программы без потери данных. Уровень напряжения хранения составляет обычно около 1 В, что позволяет в случае необходимости перевести МК на питание от автономного источника (батареи) и сохранить в этом режиме данные ОЗУ. Объем памяти данных МК, как правило, невелик и составляет обычно десятки и сотни байт. Это обстоятельство необходимо учитывать при разработке программ для МК. Так, при программировании МК константы, если возможно, не хранятся как переменные, а заносятся в ПЗУ программ. Максимально используются аппаратные возможности МК, в частности, таймеры. Прикладные программы должны ориентироваться на работу без использования больших массивов данных. 4.3.3. Регистры МК Как и все МПС, МК имеют набор регистров, которые используются для управления его ресурсами. В число этих регистров входят обычно регистры процессора (аккумулятор, регистры состояния, индексные регистры), регистры управления (регистры управления прерываниями, таймером), регистры, обеспечивающие ввод/вывод данных (регистры данных портов, регистры управления параллельным, последовательным или аналоговым вводом/выводом). Обращение к этим регистрам может производиться по-разному. В МК с RISC-процессором все регистры (часто и аккумулятор) располагаются по явно задаваемым адресам. Это обеспечивает более высокую гибкость при работе процессора. Одним из важных вопросов является размещение регистров в адресном пространстве МК. В некоторых МК все регистры и память данных располагаются в одном адресном пространстве. Это означает, что память данных совмещена с регистрами. Такой подход называется «отображением ресурсов МК на память». В других МК адресное пространство устройств ввода/вывода отделено от общего пространства памяти. Отдельное пространство ввода/вывода дает некоторое преимущество процессорам с гарвардской архитектурой, обеспечивая возможность считывать команду во время обращения к регистру ввода/вывода. 4.3.4. Стек МК В микроконтроллерах ОЗУ данных используется также для организации вызова подпрограмм и обработки прерываний. При этих операциях содержимое программного счетчика и основных регистров (аккумулятор, регистр состояния и другие) сохраняется и затем восстанавливается при возврате к основной программе. В фон-неймановской архитектуре единая область памяти используется, в том числе, и для реализации стека. При этом снижается производительность устройства, так как одновременный доступ к различным видам памяти невозможен. В частности, при выполнении команды вызова подпрограммы следующая команда выбирается после того, как в стек будет помещено содержимое программного счетчика. В гарвардской архитектуре стековые операции производятся в специально выделенной для этой цели памяти. Это означает, что при выполнении программы вызова подпрограмм процессор с гарвардской архитектурой производит несколько действий одновременно. Необходимо помнить, что МК обеих архитектур имеют ограниченную емкость памяти для хранения данных. Если в процессоре имеется отдельный стек и объем записанных в него данных превышает его емкость, то происходит циклическое изменение содержимого указателя стека, и он начинает ссылаться на ранее заполненную ячейку стека. Это означает, что после слишком большого количества вызовов подпрограмм в стеке окажется неправильный адрес возврата. Если МК использует общую область памяти для размещения данных и стека, то существует опасность, что при переполнении стека произойдет запись в область данных либо будет сделана попытка записи загружаемых в стек данных в область ПЗУ. 4.3.5. Внешняя память Несмотря на существующую тенденцию по переходу к закрытой архитектуре МК, в некоторых случаях возникает необходимость подключения дополнительной внешней памяти (как памяти программ, так и данных). Если МК содержит специальные аппаратные средства для подключения внешней памяти, то эта операция производится штатным способом (как для МП). Второй, более универсальный, способ заключается в том, чтобы использовать порты ввода/вывода для подключения внешней памяти и реализовать обращение к памяти программными средствами. Такой способ позволяет задействовать простые устройства ввода/вывода без реализации сложных шинных интерфейсов, однако приводит к снижению быстродействия системы при обращении к внешней памяти. |