|
ПРАКТИКА теоретическая механика. Литература. Основные задачи статики. План решения задач статики. Сила, способы задания. Система сил. Классификация сил. Проецирование силы на оси координат. Понятие связи. Аксиома связей. Связи и их реакции
Раздел: СТАТИКА.
Глава 1: Основные понятия и аксиомы статики.
Введение в теоретическую механику. Литература.
Основные задачи статики.
План решения задач статики.
Сила, способы задания. Система сил. Классификация сил. Проецирование силы на оси координат.
Понятие связи. Аксиома связей. Связи и их реакции.
Компетенции, полученные при изучении главы.
Примеры.

|
|
|

|

|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Глава 2: Система сходящихся сил.
Основные понятия.
Условия равновесия тел под действием системы сходящихся сил.
Теорема о трех силах.
Компетенции, полученные при изучении главы.
Примеры.
|

|
|

|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
|
Глава 3: Момент силы относительно центра и оси. Пара сил.
Алгебраический момент силы относительно центра. Способы вычисления алгебраического момента силы (пример).
Момент силы относительно оси. Способы вычисления момента силы относительно оси (геометрический и аналитический). Примеры на вычисление момента силы относительно оси геометрическим (1, 2) и аналитическим способами.
Компетенции, полученные при изучении главы.
Глава 4: Основная теорема статики. Условия равновесия твердого тела.
Основная теорема статики. Главный вектор и главный момент. Вычисление главного вектора и главного момента (пример).
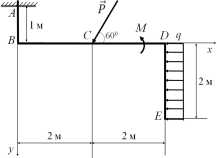
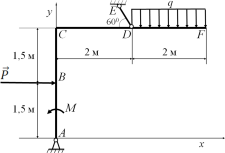
Условия равновесия твердого тела при действии пространственной и плоской системы сил.
Условия равновесия системы тел под действием сил.
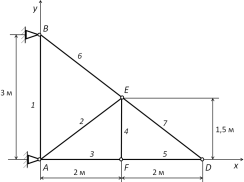
Расчет плоских ферм.
Условие равновесия тел при наличии трения скольжения. Законы Кулона-Амонтона. Реакция шероховатой поверхности. Пример.
Равновесие при наличии трения качения. Пример.
Компетенции, полученные при изучении главы.
Примеры.

|
|
|

|

|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|

|

|

|
|
|
Пример 6
|
Пример 7
|
Пример 8
|
Пример 9
|
Пример 10
|
Глава 5: Инварианты статики.
Первый и второй инвариант статики.
Частные случаи приведения произвольной системы сил. Пример.
Компетенции, полученные при изучении главы.
Глава 6: Центр параллельных сил и центр тяжести.
Центр тяжести твердого тела.
Способы вычисления центра тяжести. Центры тяжести простейших фигур (треугольник, дуга окружности, круговой сектор).
Компетенции, полученные при изучении главы.
Примеры.

|
|
|
|
|
Пример 1
|
Пример 1 (второй способ)
|
Пример 2
|
Пример 3
|
|
Раздел: КИНЕМАТИКА.
Глава 7: Кинематика точки.
Введение в кинематику. Способы задания движения точки в заданной системе отсчета (векторный, координатный, естественный).
Определение скорости и ускорения точки при координатном способе задания движения.
Определение скорости и ускорения точки при естественном способе задания движения.
Частные случаи движения точки.
Компетенции, полученные при изучении главы.
Примеры.
|

|

|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|

|

|
|
|
|
Пример 6
|
Пример 7
|
Пример 8
|
Пример 9
|
Пример10
|
Глава 8: Простейшие виды движения твердого тела.
Поступательное движение твердого тела.
Вращательное движение твердого тела. Определение скоростей и ускорений точек вращающегося тела.
Компетенции, полученные при изучении главы.
Примеры.

|

|

|
|
|
Пример 1
|
Пример 2. Иллюстрация.
|
Пример 3.Иллюстраци\.
|
Пример 4
|
Пример 5
|
Глава 9: Сложное движение точки.
Основные понятия.
Теорема о сложении скоростей.
Теорема о сложении ускорений.
Ускорение Кориолиса.
Компетенции, полученные при изучении главы.
Примеры.
|
|
|
|

|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Глава 10: Плоскопараллельное движение твердого тела.
Основные понятия.
Определение скоростей точек при плоском движении. Пример.
Мгновенный центр скоростей. Способы нахождения мгновенного центра скоростей. Примеры.
Определение ускорений точек при плоском движении. Примеры.
Мгновенный центр ускорений. Пример.
Аналитические алгоритмы плоского движения. Пример.
Сложение вращений вокруг параллельных осей. Метод Виллиса
Компетенции, полученные при изучении главы.
Вычисление скоростей точек при плоском движении.
|
|

|
|
|
Пример 1
|
Пример 2. Иллюстрация.
|
Пример 3
|
Пример 4
|
Пример 5. Иллюстрация.
|
Вычисление ускорений точек при плоском движении.
|

|
|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4 (метод Виллиса). Иллюстрация.
|
Пример 5
|
Глава 12: Сферическое и свободное движения твердого тела.
Уравнение сферического движения твердого тела. Иллюстрация.
Скорости точек тела при сферическом движении. Пример.
Свободное движение твердого тела. Иллюстрация.
Компетенции, полученные при изучении главы.
Раздел: ДИНАМИКА.
Глава 12: Законы динамики.
Основное уравнение динамики.
Дифференциальные уравнения движения материальной точки.
Основные задачи динамики точки.
План решения задач динамики точки.
Компетенции, полученные при изучении главы.
Примеры.

|
|

|

|

|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Глава 13: Прямолинейные колебания материальной точки.
Классификация сил.
Классификация колебаний.
Компетенции, полученные при изучении главы.
Примеры.
|
|

|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|

|
|
|
|
|
Пример 6. Иллюстрация
|
|
|
|
|
Глава 14-15: Введение в динамику механической системы. Общие теоремы динамики
Количество движения точки и системы. Элементарный импульс силы и импульс силы за конечный промежуток времени. Теорема об изменении количества движения механической системы. Пример.
Центр масс. Теорема о движении центра масс.
Примеры.
|

|

|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Моменты инерции относительно оси. Моменты инерции тонкого однородного стержня. Кинетический момент точки и системы относительно центра и оси. Теорема об изменении кинетического момента механической системы.
Примеры.

|
|
|

|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Кинетическая энергия. Элементарная работа силы и работа силы на конечном перемещении. Работа сила тяжести. Мощность. Теорема об изменении кинетической энергии механической системы.
Примеры.
|

|
|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
|

|
|
|
|
Пример 6
|
Пример 7
|
Пример 8
|
Пример 9
|
Пример 10
|

|
|

|

|
|
Пример 1 (Вычисление Т)
|
Пример 2 (Вычисление Т)
|
Пример 3 (Вычисление А)
|
Пример 4 (Вычисление А)
|
|
Дифференциальные уравнения поступательного, вращательного и плоского движения твердого тела. Пример.
Компетенции, полученные при изучении главы.
Глава 16. Динамика твердого тела.
Тензор инерции. Пример.
Теорема Гюйгенса-Штейнера.
Компетенции, полученные при изучении главы.
Раздел: ПРИНЦИПЫ МЕХАНИКИ.
Глава 17: Принцип Даламбера.
Сила инерции. Принципа Даламбера для точки и механической системы.
Приведение системы сил инерции твердого тела к простейшему виду. Частные случаи движения твердого тела: поступательное, вращательное и плоское.
Определение динамических реакций.
План решения задач.
Компетенции, полученные при изучении главы.
Примеры
|
|
|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
|
|
|
|
|
Пример 6
|
|
|
|
|
Глава 18. Теория удара.
Основное уравнение теории удара. Общие теоремы динамики при ударе.
.Коэффициент восстановления при ударе.
Удар о неподвижную поверхность (прямой удар точки, косой удар точки). Удар двух тел.
Теорема о потере кинетической энергии (теорема Карно).
Удар по вращающемуся телу. Определение импульсов ударных реакций.
Центр удара.
.Компетенции, полученные при изучении главы.
Примеры
|
|

|

|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
|

|
|

|
|
Пример 6
|
Пример 7
|
Пример 8
|
Пример 9.Иллюстрация
|
Пример 10
|
Глава 19: Введение в аналитическую механику.
Классификация связей.
Виртуальные перемещения. Виртуальная работа силы. Идеальные связи.
Принцип виртуальных перемещений. Примеры.
|

|

|

|

|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Общее уравнение динамики.
Компетенции, полученные при изучении главы.
Примеры.

|
|

|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Глава 20: Метод обобщенных координат.
Обобщенные координаты и скорости.
Обобщенные силы. Способы вычисления обобщенных сил.
Компетенции, полученные при изучении главы.
Примеры.

|
|
|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Глава 21: Дифференциальные уравнения движения в обобщенных координатах.
Уравнения Лагранжа второго рода.
План решения задач.
Компетенции, полученные при изучении главы.
Примеры.

|
|
|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Глава 23. Устойчивость равновесия.
Общие положения.
Определение устойчивого положения равновесия.
Теорема Лагранжа - Дирихле.
.Потенциальная энергия в малой окрестности положения равновесия.
Условие устойчивости консервативных механических систем.
.Компетенции, полученные при изучении главы.
Примеры

|

|
|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
|
Глава 24. Малые колебания механических систем.
1.Квадратичная форма представления потенциальной и кинетической энергии механической системы.
2.Дифференциальные уравнения движения механической системы в малой окрестности устойчивого положения равновесия.
3.Малые колебания системы с одной степенью свободы.
4 Малые колебания системы с двумя степенями свободы.
5.Вынужденные колебания систем с двумя степенями свободы.
6.Виброзащита.
7.Динамический гаситель колебаний.
8.Компетенции, полученные при изучении главы.
Примеры

|

|
|
|
|
Пример 1
|
Пример 2
|
Пример 3
|
Пример 4
|
Пример 5
| |
|
|
 Скачать 1.13 Mb.
Скачать 1.13 Mb.