ИНФ11. Электромеханические системы. Лабораторные работы. Методические указания по лабораторным работам Электромеханические системы Набережные Челны 2013 содержание введение 4
 Скачать 1.12 Mb. Скачать 1.12 Mb.
|

Лабораторная работа 7«Моделирование электромеханических характеристик электропривода постоянного тока в EWB»Продолжительность работы 2 часа 1.Цель Изучить конструкцию коллекторного двигателя постоянного тока (ДПТ), рассчитать по паспортным данным двигателя его основные показатели; исследовать на модели двигателя [2] механические, скоростные и рабочие характеристики привода постоянного тока. 2. Объект исследования - электропривод с коллекторным двигателем постоянного тока. Основные преимущества ДПТ по сравнению с асинхронным двигателем - хорошие регулировочные и пусковые свойства. В работе предстоит исследовать следующие характеристики привода постоянного тока: а) скоростную - зависимость частоты вращения якоря n от тока якоря Iя – n(Iя) б) механическую – зависимость частоты вращения якоря от момента М на валу: где Uя, Iя, Rя - напряжение, ток и сопротивление якоря, Rд - сопротивление добавочного резистора, включенного в цепь обмотки якоря для регулирования, постоянные ДПТ  , (3) , (3)Для обмотки якоря: N – число проводников, р – число пар полюсов, а – число параллельных ветвей. Электромагнитный момент ДПТ М = CмФIя (4) При постоянном потоке возбуждения ДПТ Км= CмФ Ке’= Cе’Ф (5) - величины постоянные, которые могут быть определены по паспортным данным ДПТ для номинальных данных (индекс 'н '):  (6) (6)Частота вращения при идеальном холостом ходе из (2): Полезная мощность (M в Нм, n в об/мин): P2 =0,1047Mn, Вт (8) Коэффициент полезного действия =P2/P1, (9) Потребляемая из сети мощность P1= UяIя+UвIв, (10) где Uв, Iв - напряжение и ток обмотки возбуждения. Поскольку n пропорционально Uя и Rд, то скоростные (рис.7.1а и 7.1б) и механические характеристики линейны.  а б Рис.7.1 Механические характеристики при реостатном (а) и якорном (б) управлении. Естественная механическая характеристика соответствует номинальным данным ДПТ при Rд=0 (прямая 1 на рис 7.1) где частота вращения холостого хода и наклон естественной характеристики  (11) (11) Из (1) следуют три возможных способа регулирования частоты вращения ДПТ: а) реостатное управление - введением дополнительного резистора Rд в цепь обмотки якоря (рис.7.2.а) при Uя= const, б) якорное управление - изменением напряжения в цепи якоря при Rд=0 (рис.7.2.б) в) полюсное управление - изменением основного магнитного потока Ф. Этот способ позволяет, в отличие от первых двух, регулировать частоту вращения вверх от номинального значения, но он не нашел применения в электроприводе полиграфических машин. Первый способ обычно применяют при групповом питании нескольких ДПТ от одного источника с нерегулируемым выходным напряжением (например, от выпрямителя) (рис.7.2 а). Каждый двигатель имеет реостат в цепи якоря, рассчитанный на длительный режим работы. Этот способ обеспечивает плавное регулирование частоты вращения в широких пределах только в сторону уменьшения частоты вращения от номинального значения. Однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (Iя2Rд), которые интенсивно растут с увеличением мощности двигателя. Включение пускового реостата в цепь питания ДПТ позволяет ограничить пусковые токи на заданном уровне. После разгона двигателя до номинальной частоты вращения этот реостат должен быть отключен.  а б Рис.7.2. Схемы питания ДПТ при реостатном (а) и якорном (б) управлении. Второй способ предусматривает питание цепи якоря от индивидуального управляемого источника питания (рис.7.2 б) (например, управляемого выпрямителя на тиристорах), с помощью которого можно изменять напряжение на обмотке якоря и регулировать частоту вращения вниз от номинального значения. Этот способ более экономичен, чем предыдущий, имеет большой диапазон регулирования частоты вращения (>25), обеспечивает одновременно безреостатный запуск ДПТ. При реостатном регулировании частоты вращения скорость идеального холостого хода n0=n0н остается неизменной (см.(7)), изменение частоты вращения n обусловлено падением напряжения как на сопротивлении обмотки якоря, так и на добавочном резисторе: При увеличении добавочного резистора n увеличивается и растет наклон искусственной механической и скоростной характеристик. При якорном управлении частота вращения идеального холостого хода уменьшается пропорционально напряжению на якоре а изменение частоты вращения не зависит от напряжения на якоре и остается неизменной. Поэтому искусственные механические характеристики при якорном управлении параллельны естественной характеристике. При пуске ДПТ (n=0) пусковой ток и момент Iяп=Uя/(Rя+Rд), Mп=IяпКм (13) уменьшаются как при якорном, так и при реостатном управлении. Краткое описание модели ДПТ [2] При программировании модели ДПТ параллельного возбуждения использовались каталожные параметры и следующие расчетные формулы: момент холостого хода М0 = (3…8%)Мн; индуктивность якоря не учитывалась; сопротивление пускового реостата Rп = (Un - RяIяп) / Iяп, где пусковой ток Iяп = (1,7... 2,5)Iян; Iян = Iн - Iвн; Iвн = Un/Rов; электромагнитный момент двигателя Мэм = СМ IяФв = М0 + М; установившаяся частота вращения якоря ny = U / (CeФв) - (M + M0) · (Rя + Rn) / (CECMФ2в) = n0 - Δn; текущая частота n, вычислялась (посредством численного метода Эйлера) из уравнения динамики ДПТ: M - Mc = Jdω / dt; n = 9,57ω; М - вращающий момент двигателя; Mc - момент сопротивления на валу двигателя, принятый независимым от угловой скорости ω и от времени t; J – суммарный момент инерции в кг·м2, пересчитанный к валу двигателя. Модель реализует реальную схему испытаний ДПТ (рис.7.3). На время запуска ДПТ для ограничения пускового тока включают пусковое сопротивление Rп. Момент сопротивления на валу создается электромагнитным тормозом (ЭМП), вал которого сочленен с валом якоря. Регулируя ток в обмотке возбуждения тормоза (ОВТ) регулятором РН, можно в широких пределах изменять Мс. При испытаниях измеряют напряжение питания U (вольтметром V), ток Ib в обмотке возбуждения (ОВ) – амперметром А1, ток в цепи якоря Iя - амперметром А2 и частоту вращения n, например тахогенератором. В соответствии с вариантом задания из приведенного в программе списка выбирается тип ДПТ параллельного возбуждения (табл.7.1). Предусмотрен также ввод вручную параметров исследуемого двигателя. 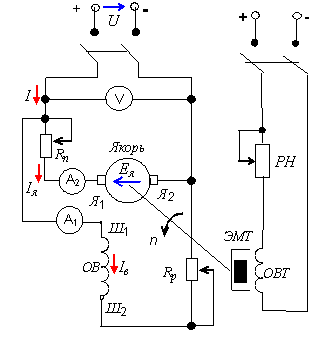 Рис.7.3 Схема испытаний ДПТ Табл. 7.1 Выбор типа двигателя по заданному варианту (N – в списке по журналу)
В табл. 7.1 приведены серийные двигатели постоянного тока серии 2П. Структура условного обозначения машин этой серии следующая: 2П – вторая серия машин постоянного тока, Н или Ф – исполнение по способу защиты и вентиляции (Н защищенное с самовентиляцией, Ф – защищенное с независимой вентиляцией от постороннего вентилятора), цифра (90, 100 и т.д.) – высота оси вращения в мм; М – средняя, L – большая длина сердечника якоря. На рис. 7.4 представлены общий вид интерфейса, каталожные параметры и динамические характеристики выбранного из списка двигателей параллельного возбуждения типа 2ПФ200L. Пуск двигателя был выполнен при моменте сопротивления на валу Mc = 0 Нм и введенном пусковом реостате Rn (пусковой ток Iп = 2,5Iян, ток возбуждения Iв = Iвн= const ). После вывода пускового реостата частота вращения якоря увеличилась до 1500 об/мин.. Далее, момент сопротивления Mc был увеличен ступенями до 190 Н·м. Анализ графиков частоты вращения n, вращающего момента М и тока якоря Iя от времени, а также текущих параметров двигателя показывает, что расчетная модель адекватно отображает как статические, так и динамические электромагнитные процессы в двигателе. 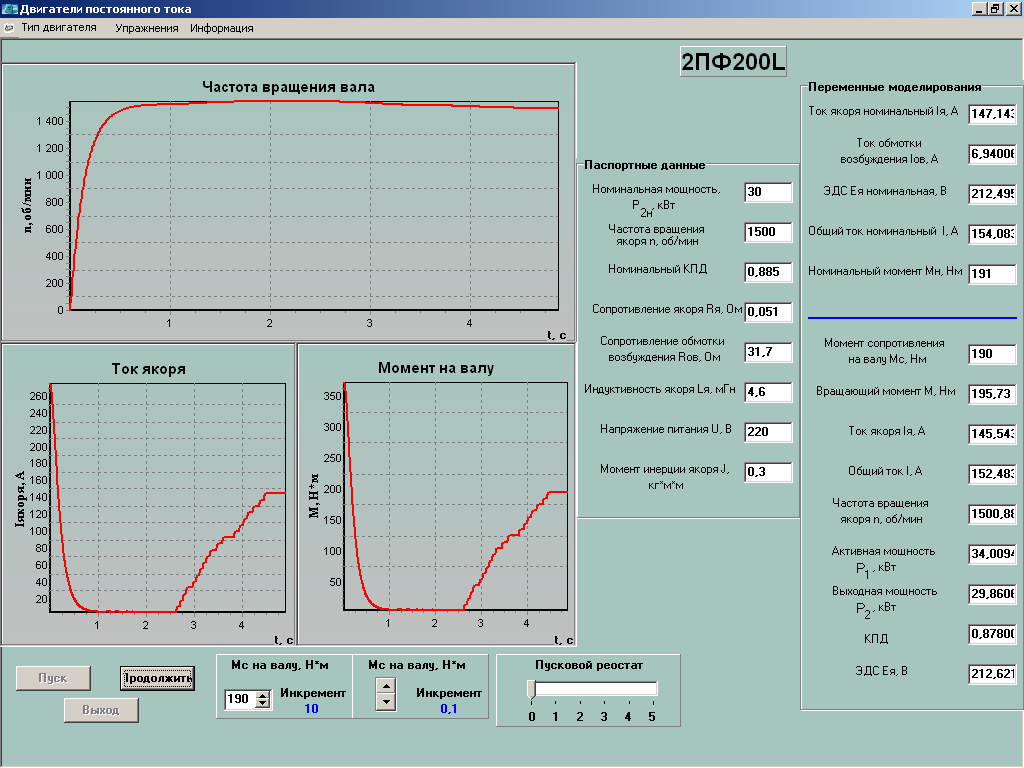 Рис.7.4 Общий вид интерфейса программы моделирования ДПТ. 3.Домашняя теоретическая подготовка 1. Принцип действия, устройство, особенности конструкции, способы управления, основные характеристики в режиме управления коллекторного привода постоянного тока.[1], с.90-108. 4. Задание к экспериментальной части 4.1. Ознакомиться с интерфейсом модели испытания ДПТ параллельного возбуждения (рис. 7.4), уточнив назначение: - окон, снабженных стрелками и предназначенных для изменения момента сопротивления Мс на валу и сопротивления пускового реостата; - выделенных справа экрана полей, в которые выводятся каталожные параметры двигателя и текущие значения расчетных величин. 4.2 Щелкнуть мышью на кнопке "Тип двигателя" и, согласно варианту N задания (N - номер записи фамилии студента в учебном журнале группы), выбрать из списка тип двигателя постоянного тока параллельного возбуждения. Записать в отчёт (табл.7.2) каталожные данные ДПТ: номинальное напряжение питания Uн, номинальную частоту вращения вала nн, номинальную механическую мощность Рн = Р2н на валу, номинальный ток якоря Iян, сопротивление якоря Rя, сопротивление обмотки возбуждения Rов, КПД двигателя ηн и момент инерции J. Табл.7.2. Каталожные данные ДПТ
4.3. Осуществить "пуск в ход" ДПТ (запустить программу моделирования и расчета параметров ДПТ) и "снять" механическую и рабочие характеристики ДПТ параллельного возбуждения. С этой целью: - щелкнуть мышью на кнопке " Пуск ", т. е. "подключить" обмотку якоря и обмотку возбуждения ДПТ к сети постоянного тока. Уменьшая ступенчато сопротивление пускового реостата из положения 5 в положения 0 с выдержкой времени в каждом промежуточном положении не менее 2...3 с, наблюдать переходные процессы в ДПТ по графикам n(t), Iя(t) и M(t), выводимым на рабочем поле программы. После установления частоты вращения вала n, записать в строку 1 табл. 7.3 значения параметров в режиме холостого хода: напряжения U; тока Iя; активной мощности Р1, потребляемой ДПТ из сети; частоты вращения ротора n0; момента холостого хода М0 (полезный момент на валу при хх - М = 0), которые выводятся в соответствующих окнах на экране дисплея. Табл.7.3 Экспериментальные и расчетные данные U=…..В.
В таблице полные потери в двигателе Р=Р1-Р2 4.4. Воспользовавшись графиками n(t), определить время tх разгона ДПТ при холостом ходе (выводя пусковой реостат, например, за 2-3 с) При разгоне пусковой реостат выводить со "скоростью", не приводящей к "срабатыванию" магнитного пускателя. Снять копии графиков с экрана дисплея и занести в отчет. На графиках n(t) нанести линии и отметить отрезки, соответствующие временам разгона на холостом ходу tх (от t = 0 до tх при n = 0,95nн). 4.5 Снять механическую n = f (M) и рабочие характеристики I1 = f(Р2), M = f(Р2), = f(Р2), Р1= f(Р2), Р= f(Р2) двигателя при напряжении U = Uн = const и токе возбуждения Iв = Iвн = const. Для снятия характеристик необходимо: - ступенчато увеличивая момент сопротивления (нагрузку) Мс на валу ДПТ, записывать в табл. 7.3 показания "измерительных приборов" (U, Iя, Р1, n и М) при 8...10 значениях момента Мс: от режима холостого хода (Мс = 0, Р2 = 0) до значения Мс= (1,2)Мн, где Мн = 9550Р2н / nн (Р2н в кВт); - остановить двигатель, который в реальных условиях выполняют в следующей последовательности: а) плавно уменьшают нагрузку до нуля (где это возможно); б ) переводят ручку пускового реостата из положения 0 в положение 5 и, нажав кнопку "Выход", отключают двигатель от сети. 4.6 Оценить возможность и эффективность регулирования частоты вращения при номинальном моменте путем ступенчатого увеличения сопротивления добавочного резистора. Данные измерений занести в табл.7,4. Табл.7.4 Характеристики двигателя при ступенчатом регулировании частоты вращения. U=…..В, Мсн=…..Нм; М=…..Нм; Iя=……А; I=……А
В таблице полные потери в двигателе Р=Р1-Р2; потери в дополнительном сопротивлении Рr=Р-Р0, где Р0 потери в двигателе при дополнительном сопротивлении равном 0. 4.7 Оценить эффективность якорного управления по сравнению с реостатным регулированием. Уменьшим номинальную частоту вращения в 2 раза при уменьшении напряжения питания примерно в 2 раза. Для этого запускаем программу моделирования двигателя, запускаем программу расчета, далее задаем параметры двигателя вручную. В 2 раза уменьшаем Р2н, n2, Uн. Остальные величины вводим такими же, как и в п. 4.2. Запускаем программу на расчет. Измеряем полученные величины при холостом ходе, а затем нагружаем двигатель номинальным моментом. Заносим в табл. 7.4 Табл.7.5
Сравните потери в двигателе при одной же частоте вращения и моменте сопротивления для случая реостатного регулирования п.4.5 и якорного п.4.6. 5.Обработка и анализ результатов эксперимента Отчет должен содержать: 5.1 Схему испытаний. 5.2 Таблицы с экспериментальными и расчетными данными. 5.3 По результатам вычислительного эксперимента (табл. 7.3-7.5) построить механическую n = f(M) и рабочие характеристики I1 = f(Р2), M = f(Р2), = f(Р2), Р1= f(Р2), Р= f(Р2) ДПТ. 6.Вопросы к защите лабораторной работы 1 Устройство ДПТ. Как устроена обмотка возбуждения и якоря? Устройство и назначение коллектора. Из каких участков состоит магнитная цепь ДПТ? 2 Принцип действия ДПТ. Поясните, как образуется электромагнитный момент ДПТ и эдс в обмотке якоря. Выражения для момента и эдс. Почему с увеличением механической нагрузки на валу ДПТ возрастает потребляемый из сети ток, мощность и уменьшается частота вращения якоря? Оцените изменения этих характеристик по опытным данным. 3 Механическая характеристика ДПТ. Естественная характеристика. Как построить характеристику по паспортным данным? Искусственные характеристики при якорном и реостатном управлении. Поясните ход полученных из опыта характеристик. 4 Скоростная характеристика привода постоянного тока. Естественная характеристика. Как построить характеристику по паспортным данным? Искусственные характеристики при якорном и реостатном управлении. Поясните ход полученных из опыта характеристик. 5 Рабочие характеристики привода постоянного тока. Как в опыте определяли полезную и потребляемую мощность? Нарисуйте вид этих зависимостей и поясните их ход. Какие точки рабочих характеристик определялись в опыте? 6 Энергетические характеристики привода постоянного тока. Кпд двигателя, постоянные и переменные потери. Почему при рассмотрении энергетического баланса ДПТ не учитывают магнитные потери в магнитопроводе обмотки возбуждения? Как по Вашим опытным данным приближенно рассчитать электрические потери в обмотках возбуждения, якоря и магнитные потери? 7 Перечислите способы регулирования частоты вращения привода постоянного тока и дайте им сравнительную оценку. Как влияет изменение напряжения питания якоря при регулировании на механическую и скоростную характеристику? Почему уменьшается частота вращения при уменьшении напряжения питания? Как при якорном управлении изменяются пусковой ток и момент? 8 Преимущества и недостатки реостатного управления ДПТ. Вид скоростной и механической характеристик при реостатном управлении. Почему уменьшается частота вращения при введении добавочного сопротивления в цепь обмотки якоря? Как при реостатном управлении изменяются пусковой ток и момент? Оцените потери в добавочном сопротивлении по опытным данным. Сопоставьте по опытным данным по кпд привод при реостатном и якорном управлении (по опытным данным для номинального режима). 9 Способы электромагнитного торможения привода постоянного тока. Преимущества и недостатки. Механические характеристики и ограничивающие добавочные сопротивления при торможении разными способами. Как изменить направление вращения привода? Покажите по схеме испытаний, какие переключения необходимо сделать для изменения вращения привода. На сетевом рубильнике поменяли местами зажимы двух проводов, соединяющих рубильник с ДПТ. Изменится ли направление вращения ротора при этом, если: а) ДПТ выполнен с параллельным возбуждением, б) ДПТ выполнен с независимым возбуждением? 10 Показатели, характеризующие пусковые свойства привода постоянного тока. Схемы запуска ДПТ при якорном и реостатном регулировании. Как лучше, с точки зрения улучшения пусковых свойств, уменьшить пусковой ток: снижением подводимого к якорю напряжения или увеличением активного сопротивления в цепи якоря? Сравните по опытным данным пусковые характеристики ДПТ при якорном и реостатном управлении. ЛитератураНиканоров В.Б., Шмелева Г.А. Электромеханические системы: Учебное пособие. -М.: Изд-во МГУП, 2006. Беневоленский С.Б., Марченко А.Л. Основы электротехники. Электронный учебно-методический комплекс. М.: МАТИ, регистрационный № 5341 от 28.10.2005. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины и микромашины. М.: Высшая школа, 1990. Касаткин А.С., Немцов М.В. Электротехника. М.: Высшая школа, 1999. Маслов С.И., Тыричев П.А. Электромеханические системы. Введение в теорию и практику электромеханических систем. М.: Изд-во МЭИ, 1999. Бабичев Ю.Е., Вавилова И.В., Виноградова Л.Е. и др. Общая электротехника и электроника. Компьютерные технологии практических занятий: Учебно-методическое пособие. - М.: МГАУ им. В.П. Горячкина.- 96с. |