лекции Моделирование. лк 1. Модель копия или образец идеального объекта Моделирование замещение объекта его копией
 Скачать 5.76 Mb. Скачать 5.76 Mb.
|

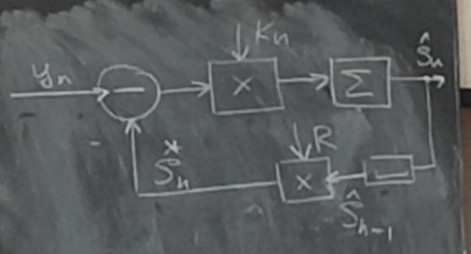
S0 – априорная оценка полезного сигнала
Sn-1 – оценка полезного сигнала на n-1 шаге.
sn+1 = f(
s(n) = F(y1, y2, … ,yn) – не рекуррентная фильтрация
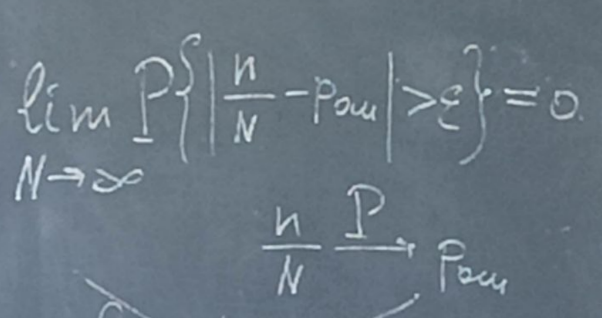
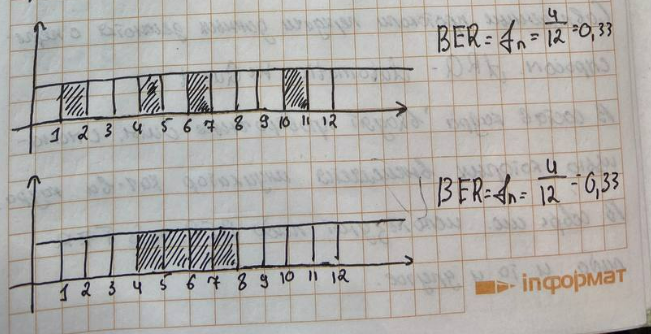
s(n) являются случайными процессами. Поэтому ε(n) тоже будет случайным процессом.5 сентябряМодель – копия или образец идеального объекта Моделирование – замещение объекта его копией При разработке различных технических систем в том числе систем связи пользуются моделированием, и только после проведения моделирование уже проводятся лабораторные эксперименты над реальными системами. Во многих случаях провести натурный эксперимент либо очень дорого, либо вообще невозможно. Моделирование на сегодняшний день — это основной метод исследования различных технических систем и процессов. Модель должна обладать определенным сходством с оригиналом. При моделировании, свойства идеального объекта делятся на существенные для данной задачи, и несущественные. Модель должна воспроизводить существенные свойства. Виды моделейМодели бывают: математические и имитационные, соответственно моделирование бывает: математическое и имитационное. При математическом моделировании сначала на основе известных физических законов составляются математические уравнения, описывающие реальный объект. Эти уравнения решаются, и на основе решения делается вывод о свойствах этого реального объекта. Из-за сложности решения математических уравнений, математическое моделирование в современных условиях имеет ограниченное применение. При имитационном моделировании составляются уравнения, описывающие поведение исследуемого объекта. В отличии от математического моделирования эти уравнения решать не требуется. На сегодняшний именно метод имитационного моделирования является основным способом исследования сложных технических систем и процессов. Классификация моделейМодели могут быть: детерминированные и стохастические. Детерминированные модели не учитывают различные случайные факторы. Стохастические, соответственно, учитываю случайные факторы. К случайным факторам относится: внешнее случайное воздействие на исследуемый объект, внутренние случайные факторы, старение. На сегодняшний день более полным методом является стохастическое моделирование, для исследования сложных процессов. Статические модели и динамические: статические описывают поведение объекта в определенный момент времени, динамические – описывают поведение объекта во времени. Имитационное моделирование выгодно применять если выполняется хотя бы одно из условий: не существует законченно математической постановки задач, аналитически описать систему очень сложно, аналитические решения имеются, но их реализация невозможна из-за недостаточной математической подготовки персонала, необходимо осуществлять наблюдение за процессом в течении определенного времени. При проведении имитационного моделирования требуется контролировать погрешность. Адекватность моделиАдекватность – степень соответствия модели реальному объекту. Задача проверки адекватности модели должна решаться в течении всего процесса моделирования. Недостатки модели: Модель может содержать несущественные переменные. Модель может не содержать существенных переменных. Иерархия моделейСначала строится самая простая модель, которая учитывает только основные свойства объекта. Это самая простая модель – низшая ступень иерархии. Она обычно не адекватная. Для того чтобы модель была более точной мы должны учесть большее кол-во свойств реального объекта, и построить более точную модель, но эта модель будет более сложной – 2 уровень иерархии Надо учесть больше свойств реального объекта, и построить более точную модель, если нас по-прежнему что-то не устраивает. Этот процесс повторяется, пока нас не будет устраивать степень точности\адекватности, процесс прекращается, когда модель станет недопустимо сложной. Существуют способы упрощения модели без снижения её адекватности. Моделирование случайных чиселСлучайное событие – может произойти, а может и нет. Случайные события характеризуются вероятностями их наступления. Вероятность случайного события P(A) = [0, 1] Случайная величина – это величина, значение которой после проведения эксперимента нельзя точно предсказать. 19 сентябряДля генерации случайных величин используются датчики случайных чисел. Датчик случайных чисел – это специализированная программа, которая генерирует некоторую последовательность чисел по определенному правилу или алгоритму. Причем эта последовательность не является случайной, а является детерминированной. Гипотеза Лапласова детерминирования – если мы знаем всё про все молекулы во вселенной Датчик случайной величины должен быть построен таким образом, чтобы свойства детерминированности были такие же как в случайной последовательности. В основных программных пакетах датчики уже созданы, нам нет нужды их программировать. В матлабе существует датчик rand(1) который формирует детерминированную последовательность, которая равномерно распределена в интервале (0, 1), но мы ее считаем случайной Формирование случайной величины с равномерным распределениемКаждый раз при повторном запуске x = rand(1); мы будем получать новое значение случайной величины Х которая будет находится между 0 и 1. Rand(1) X = (a, b) Шаг 1 – формируем случайную величину Y имеющюю равномерное распределение в интервале (0, 1) Шаг 2 – осществляем линейное преобразование величины Y – поулчаем величину X – которая равна = (b – a) * Y + a Y = rand(1); X = (b-a)*y + a; Формирование дискретных двоичных случайных величинДискретная случайная величина которая может принимать только два значения называется двоичной или бинарной случайной величиной. В связи информация передается по битам. Rand(1) – мы модем установить порог в 0.5 и создать такой алгоритм: X = rand(1); If (x <= 0.5) I = 0; Else I = 1; Рассмотрим формирование двоичной случайной величины с НЕравновероятным распределением: X = rand(1); If (x <= 0.5) I = 0; Else I = 1; Формирование дискретных НЕ двоичных случайных величин:0; 1; 2; 3; 4; 5; 6; 7 Вероятность того. что случайная величина C примет значение G равна 1/8 Сначала формируются двоичные случайные величины ξ0 ξ1 или ξ2. В общем случае формирование дискретных недвоичных случайных величин производится на основе двоичных случайных величин. Формирование Гауссовской случайной величиныГауссовская случайная величина относится к непрерывным случайным величинам. 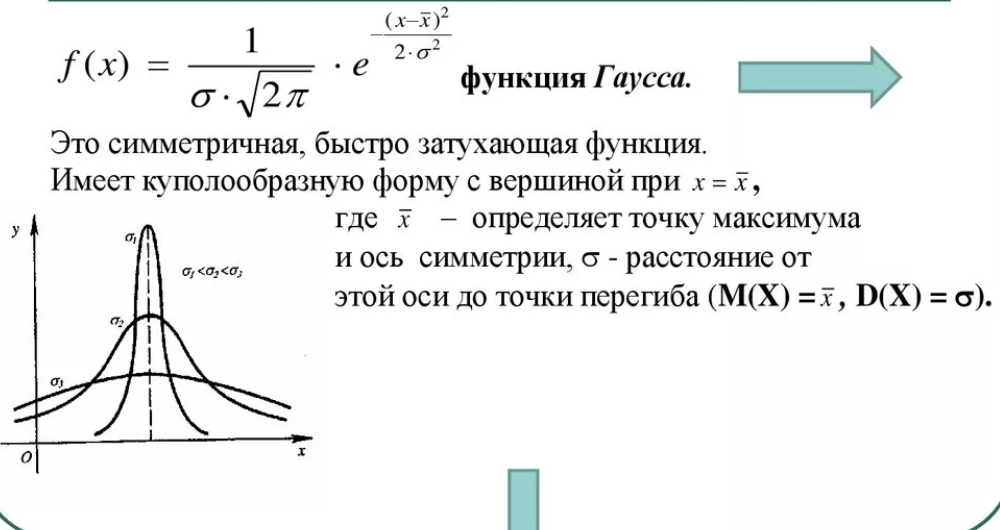 Шумы и помехи в технических системах и в системах связи имеют гауссовское распределение. Центральная предельная теорема – допустим у нас есть случайные величины x1, x2, x3 … xn и мы можем составить случайную величину которая будет суммой всех этих случайных величин – сумма большого кол-ва случайных величин это случайная величина закон распределения которой приближается к Гауссовскому закону о распределении при увеличении числа членов в сумме. Чем больше n, тем ближе значение величины к гауссовскому распределению. Условия справедливости центральной предельной теоремы: нужно чтобы эти случайные величины (члены сумма) были между собой слабо зависимы среди членов суммы не было доминирующего члена Обычно шумы и помехи в системах связи и в целом информационных системах представляют собой сумму различных случайных воздействий. T = randn(1); - m = 0, D(x) = 1 Задача формирования гауссовского Дано: m; d = σ2 Найти: случайную величину X Шаг 1 – формируем случайную величину Y с распределением m = 0 и σ2 = 1 Y = randn(1); Шаг 2 – делаем линейное преобразование величины Y X = σ*Y + m X = sqrt(D)*Y + m Известен следующий универсальный принцип который используется при формировании случайных величин – сначала формируется случайная величина с неким простым распределением, а затем путем некоторого (обычно линейного) преобразования формируется случайная величина с требуемым более сложным распределением. Формирования рэлеевской случайной величиныПредположим что X и Y это случайные величины с нулевыми m = 0, и с одинаковыми дисперсиями. σ2х не зависит от σ2y. X = sqrt(D) * randn(1); Y = sqrt(D) * randn(1); Z = sqrt(X2 + Y2) Существует огромное количества случайных величин и распределений, для каждой есть свой собственный метод формирования. 06 октябряФормирование случайных векторовСлучайный вектор – совокупность заданного количества заданных случайных величин. Случайный вектор размерности n – это совокупность из m случайных величин. На первый взгляд, проблемы никакой нет, и можно сформировать каждый компонент случайного вектора. Пример: пусть нам надо сформировать случайный вектор гауссовскими компонентами, каждый из которых имеет нулевое средне и единичное дисперсии X(1) = randn(1); X(2) = randn(1); … X(n) = randn(1); Можно сделать так For I = 1:n X(i) = randn(1); End; Такая реализация программы формирования гауссовского случайного вектора неоптимальна с точки зрения времени выполнения программы. ТрансляторыТранслятор — это такая специальная программа, которая преобразует программу на ЯП высокого уровня, в программу написанную на языке машинных кодов. Трансляторы бывают двух видов: компиляторы и интерпретаторы. Компилятор – транслятор, который переводит сразу всю программу на язык машинных кодов, а потом вся программа целиком на машинных кодах целиком исполняется. Интерпретатор – осуществляет трансляцию в машинные коды построчно, и исполнения тоже построчное. MATLAB – интерпретатор. Время выполнения программы в среде MATLAB в режиме интерпретатора оказывается во много раз больше, чем при использовании режима компилятора. X = randn(n, 1); - вектор с числом столбцов n и строк 1 Данная программа формирует гауссовский случайный вектор с независимыми компонентами, каждая из которых имеет нулевое математическое ожидание и единичную дисперсию. При составлении программ моделирования в системе MATLAB, необходимо всячески избегать циклов. В MATLABе предусмотрено средство векторизации циклов. MATLAB ориентирован на операции с векторами и матрицами. Пример №1Сформировать гауссовский случайный вектор с независимыми компонентами, каждый из которых имеет математическое ожидание M и дисперсию равную 1. σ2 = D = 1, m For I = 1:n X(i) = randn(1) + m; End; X = randn(n, 1) + m; - в данном случае это сложение необычное, оно означает что к каждой компоненте randn прибавляется число m. Пример 2Сформировать гауссовскую случайный вектор с независимыми компонентами, каждый из которых имеет свое собственное математическое ожидание единичную дисперсию m-> = {m1, m2, m3}, σ2 = D = 1 for I = 1:n x(i) = randn(1) + m(i); end; после векторизации: x = randn(n, 1) + m; - m это не число, а вектор. Операция сложения двух векторов. Пример 3Сформировать гауссовский случайный вектор с независимыми компонентами, каждый из которых имеет свое собственное математическое ожидание и дисперсию D = σ2. For I = 1:n X(i) = sqrt(D)*randn(1) + m(i); End; После векторизации: X = sqrt(D)*randn(n, 1) + m; - число умножатся на вектор, тоесть на каждую компоненту вектора. И сложение двух векторов. Пример 4Сформировать гауссовский случайный вектор с независимыми компонентами, каждый из которых имеет свое собственное математическое ожидание, и свою собственную дисперсию. M-> = {m1, m2, m3}, D-> = {D1, D2, D3} For I = 1:n X(i) = sqrt(D(i))*randn(1) + m(i); End; После векторизации: X = sqrt(D).*randn(n, 1) + m; - sqrt(D) означает что квадратный корень берется из каждой компоненты вектора D. «.» означает что умножение носит поэлементный характер. Когда два вектора-столбца одинаковой размерности можно перемножить и получить новый вектор-столбец. Формирование гауссовского случайного вектора с зависимыми компонентамиЗависимость и независимость случайных величинДопустим есть две случайные величины X и Y. Пара случайных величин называется совокупностью. Для полного описания совокупности двух случайных величин достаточно иметь их совместную плотность распределения p(x, y). Если есть отдельная случайная величина x, то полная вероятностное описание этой величины дает ее плотность распределения p(x). Аналогично для y – p(y). Если случайные величины x и y независимы то их совместная плотность распределения равно произведению плотностей: p(x, y) = p(x) * p(y) Независимость означает, что плотность распределения одной случайной величины не зависит от тех значений, которые принимает другая случайная величина. Есть две случайные величины X и Y. Между ними можно вычислить коэффициент корреляции – 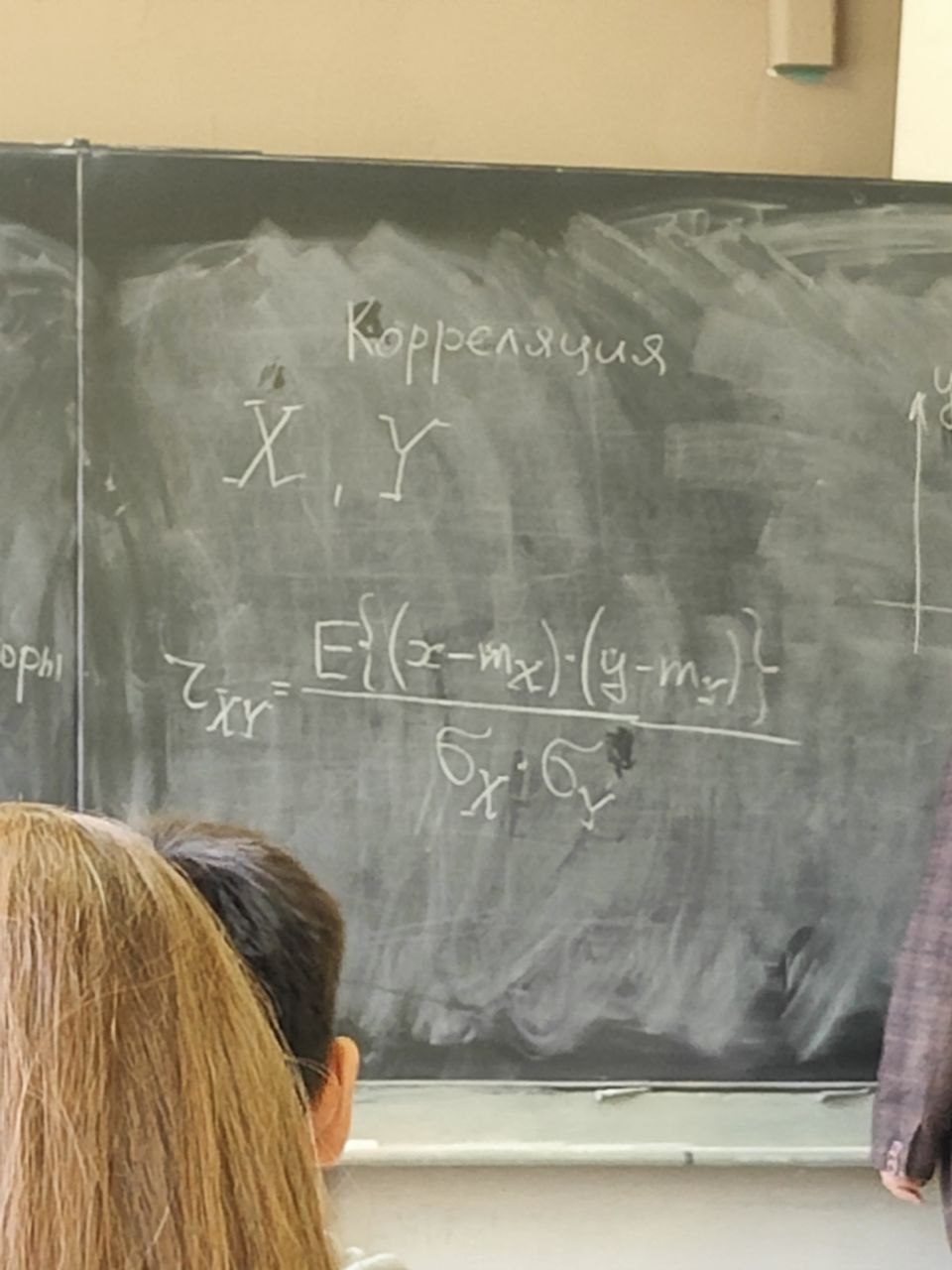 Если случайные величины X и Y независимы, то они не коррелированы, то есть их коэффициент корреляции равен 0. Если случайные величины X и Y зависимы, то они могут быть как коррелированы, так и некоррелированные. Корреляция отображает линейную вероятностную зависимость. Если случайные величины X и Y являются гауссовскими, то для них понятие корреляции и зависимости совпадают. Если случайные величины гауссвские и зависимые, значит, что они коррелированные. Гауссовский случайный векторX-> = {X1, … ,Xn}; m-> = {m1, m2, … ,mn} И описывается ковариационный матрицей V. Если у нас есть компоненты вектора Xi и Xj то мы можем вычислить ковариацию 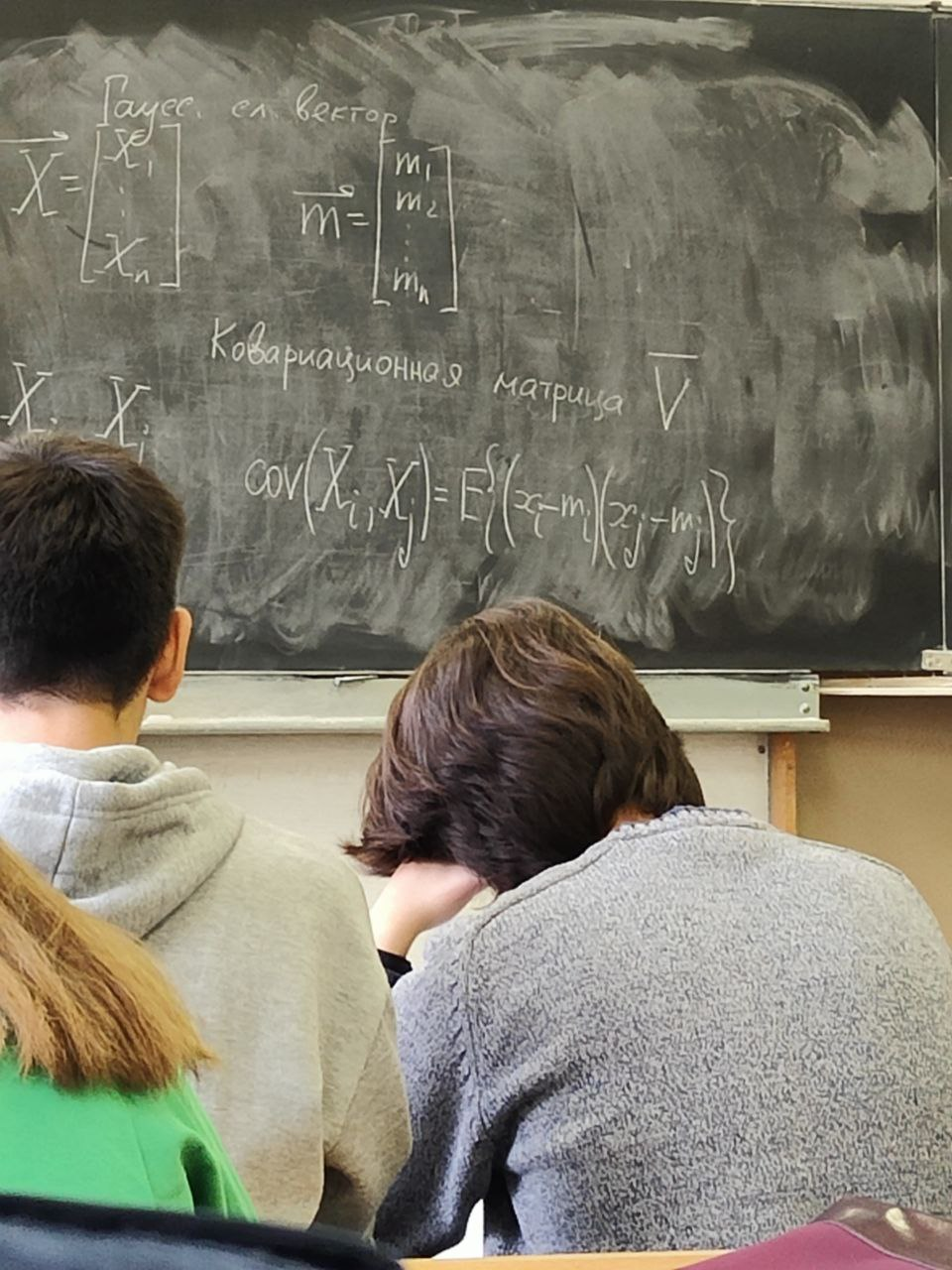 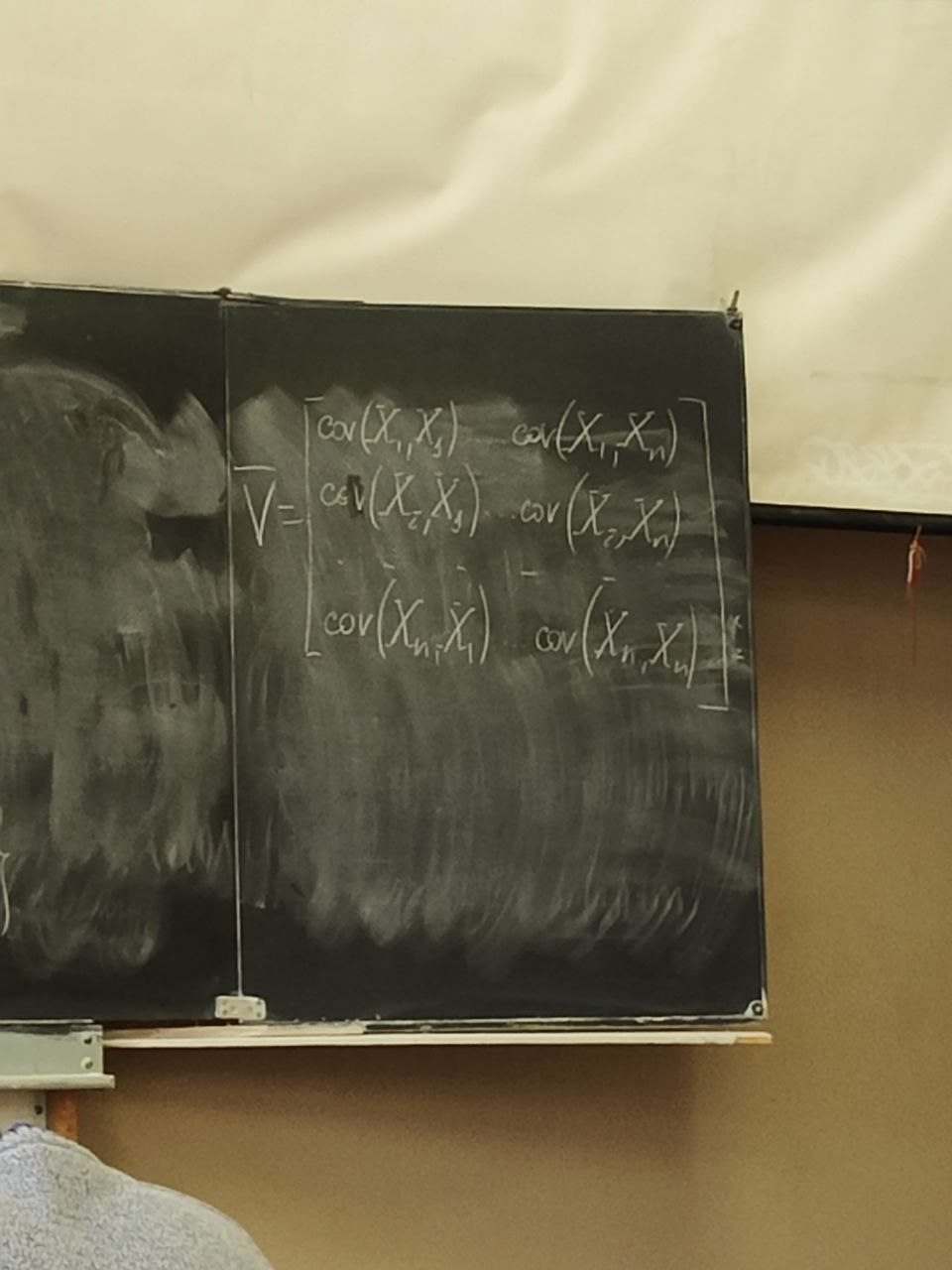 Существует еще одно описание – корреляционная матрица. Она состоит из коэффициентов корреляции. 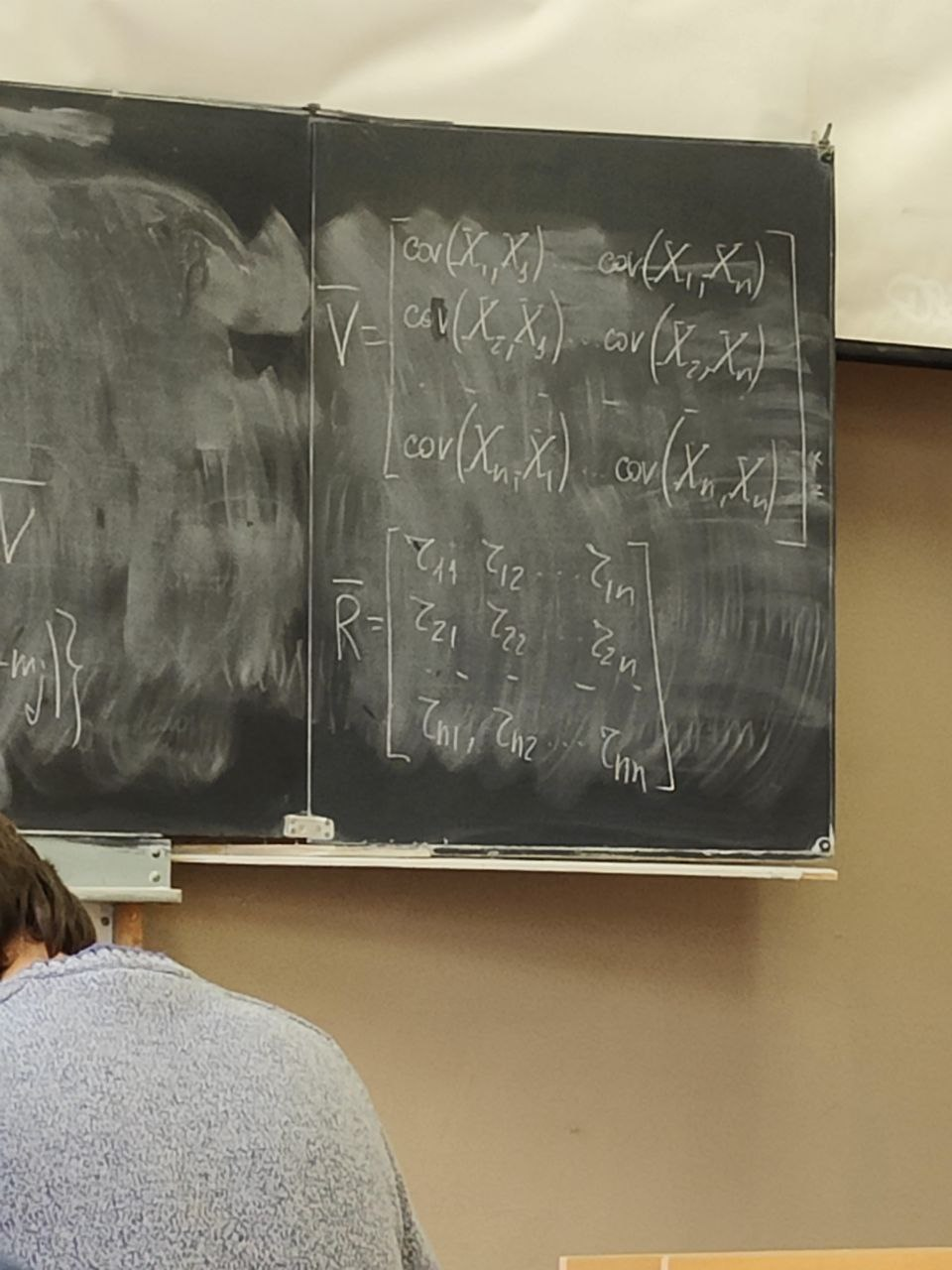 Сам коэффициент корреляции находится в пределах от -1 до 1. 20 октябряЗадачаСформировать гауссовский случайный вектор с заданным вектором математических ожиданий и с заданной корреляционной матрицей. Свойство корреляционной матрицыRii = 1; коэффициент корреляции случайной величины с самой собой равен 1. Задача решается в два этапа: На первом этапе формируется гауссовский случайный вектор y-> с нулевым математическим ожиданием My = 0 и корреляционная матрица Ry = 1 которая является единичной матрицей. Второй этап: формируем наш искомый вектор X ьс помощью линейного преобразования: X-> = T->*Y-> + b-> С заданным mx и с заданным Rx Матрица T и вектор b пока неизвестны. Найти:Матрицу T и вектор b Выполним операцию математического ожидания над обеими частями равенства: Mx = E{T*Y+b} = E{T * Y} + b = T * E{Y} + b = T * 0 + b = b Mx = b Rx = E{(X – mx)*(X-mx)} = E{(T*Y)*(T*Y)T}=E{T*Y*TT*YT} = Поскольку матрица T(тэ большое)– это не случайная матрица, то ее можно вынести за знак усреднения, тогда получаем: = T*E{Y*YT}TT = T * TT Rx = T * TT – необходимо решить это квадратное матричное уравнение, и найти матрицу Т Известно, из теории матриц, разложение Холецкого для квадратной матрицы. R = U * UT, где U – тоже квадратная матрица, только она верхняя треугольная Для того чтобы существовало разложение Холецкого, нужно чтобы матрица R была положительно определенной. Существует алгоритм вычисления разложения Холецкого, который уже реализован в MATLAB. В MATLAB есть функция – T = chol(R); Если функция chol дает ошибку, это значит что разложение Холецкого вычислить невозможно, то задача формирования нашего вектора X тоже не имеет решения. Данная матрица не является корреляционной. Существуют способы определить заранее положительно определенная матрица, или нет. Существуют критерии выяснения того, является ли матрица положительно определенной. Самый известный – критерий Сильвестра. Составим программу для решения задачи: Y = randn(n, 1); T = chol(R); X = T*Y+m; В данном случае мы снова воспользовались уже известным правилом, которое состоит в то, что мы сначала формируем случайный вектор с простым распределением, а затем делаем его преобразование (в данном случае линейное), и получаем нужный нам вектор со сложным законом распределения. Моделирование систем связиВ системах связи обычно используются потоки бит для переноса информации, с помощью которых переносится любая информация (речь, видео, аудио, и т.д. Кодер источника устраняет информационную избыточность – это значит что если в исходном файле символы сильно зависимы, то кодер источника эту зависимость устраняет. Помехоустойчивый кодер вводит избыточность передаваемых данных, за счет этого на приемной стороне можно исправить некоторые ошибки. Модулятор нужен для того чтобы приспособить свойства сигнала к свойствам канала связи. Канал связи – среда распространения сигнала. Это может быть провод, оптоволокно, или просто пространство в случае радиоволн. В канале связи сигнал подвергается воздействию шумов, помех и искажений. Принятые комплексные моделированные символы 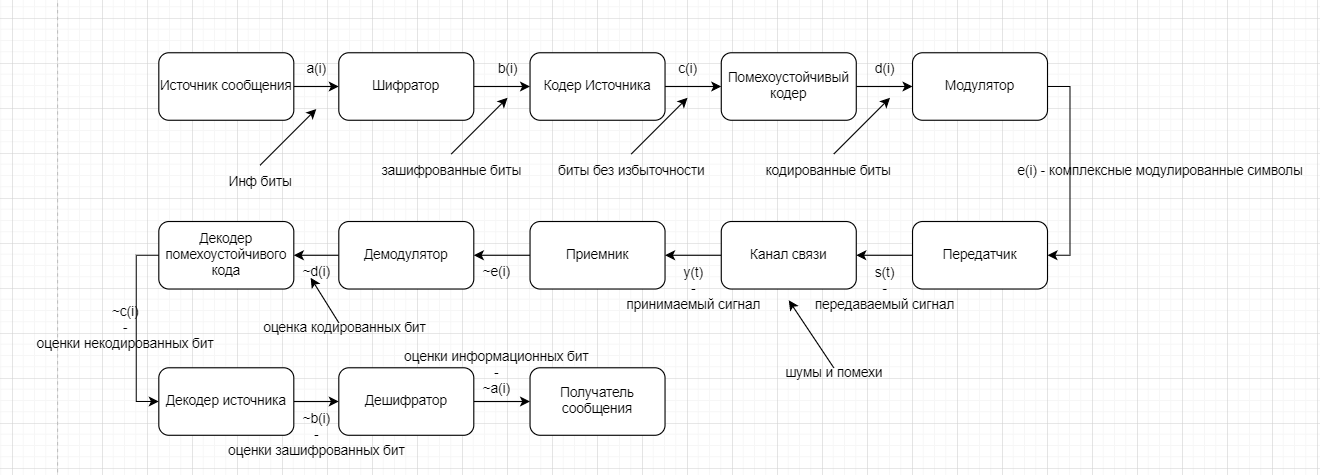 Критерием качества работы системы связи может быть вероятность ошибки на бит. P{ |
Идеальный канал связи
Канал связи без замираний с Аддитивным Белым Гауссовским Шумом (АБГШ) (AWGN – Additive White Gaussian Noise)
Тепловой шум приемника
Внутрисистемные помехи
Межсистемные помехи
Индустриальные помехи (помехи промышленного происхождения)
Технический
Организационный (административный)
Модель канала связи с замираниями с Аддитивным Белым Гауссовским Шумом (АБГШ) (AWGN – Additive White Gaussian Noise)
Нестационарная модель канала связи с замираниями и с Аддитивным Белым Гауссовским Шумом
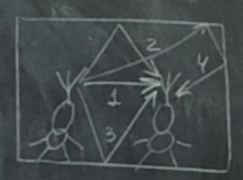
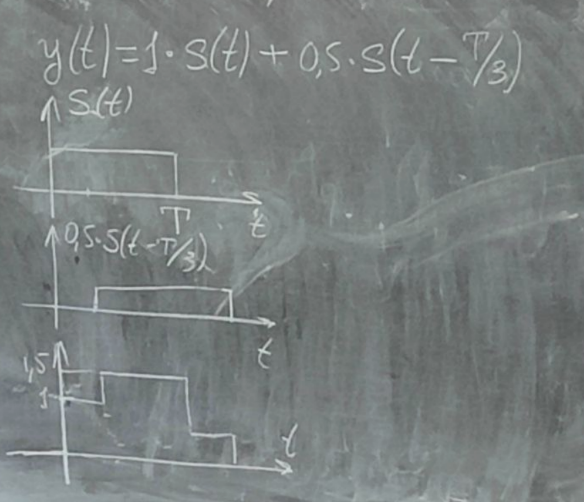
Многолучевые модели канала связи с АБГШ.

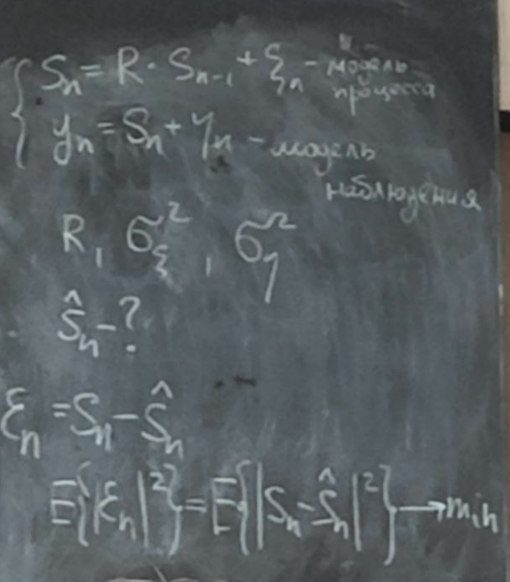
ε(n)
Критерием качества фильтрации выберем средний квадрат ошибки фильтрации. Среди всех возможных оценок мы должны выбрать такую оценку, которая дает минимальный средний квадрат ошибки фильтрации.
Решение задачи фильтрации может быть записано в следующем виде.
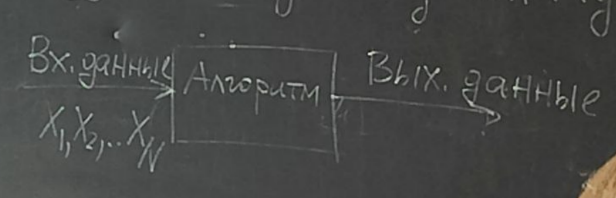
Мы имеем n отсчетов наблюдаемого сигнала, дальше эти n отчетов мы обрабатываем с помощью функции F, и получаем оценку полезного
Крупным недостатком не рекуррентной фильтрации является то, что при поступлении нового отсчета наблюдаемого сигнала, оценка sn выбрасывается, и заного рассчитывается новая оценка
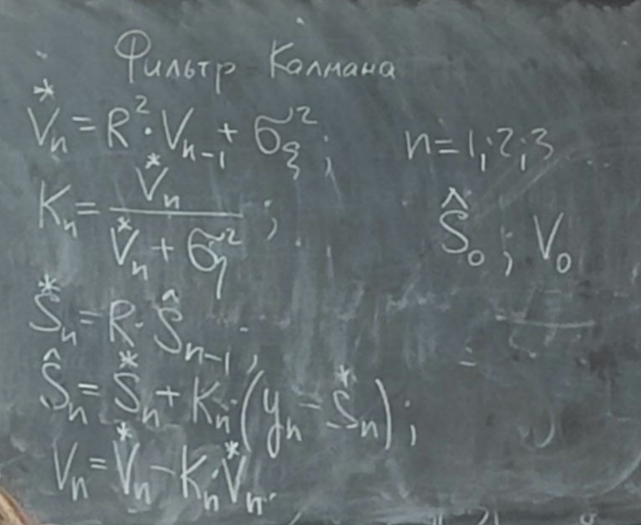





*Sn – экстраполированная (предсказанная) оценка с прошлого n-1 шага на текущий