Модернизация лабораторного стенда с преобразователем частоты фирмы АВВ. Модернизация лабораторного стенда с преобразователем частоты фирмы авв
 Скачать 3.27 Mb. Скачать 3.27 Mb.
|

|
Система ПЧ – АД с положительной обратной связью по току Теоретически и практически доказано, что в классе законов  невозможно одновременно обеспечить удовлетворительные механические и энергетические характеристики в широком диапазоне скоростей и изменения нагрузки. Основная причина этого – возрастание влияния активного сопротивления обмотки статора при снижении частоты питающего напряжения. В асинхронных частотнорегулируемых электроприводах со скалярным управлением, кроме законов регулирования класса , получили применение и другие законы регулирования. невозможно одновременно обеспечить удовлетворительные механические и энергетические характеристики в широком диапазоне скоростей и изменения нагрузки. Основная причина этого – возрастание влияния активного сопротивления обмотки статора при снижении частоты питающего напряжения. В асинхронных частотнорегулируемых электроприводах со скалярным управлением, кроме законов регулирования класса , получили применение и другие законы регулирования.Схема замещения асинхронной машины, пригодная для анализа как установившихся, так и переходных режимов работы при любой частоте питающего напряжения обмоток статора приведена на рисунке 1.12. 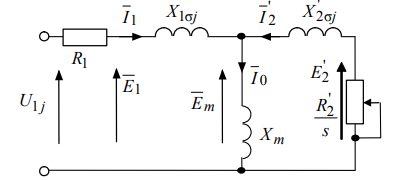 Рисунок 1.18 – Схема замещение асинхронной машины в установившемся режиме при частотном управлении В соответствии со схемой замещения можно записать следующие уравнения:  ; (1.18) ; (1.18) ; (1.19) ; (1.19) . (1.20) . (1.20)Таким образом, компенсируя падения напряжения на сопротивлениях, можно получить частотные законы регулирования скорости классов  , ,  , ,  . .В соответствии с уравнениями математической модели асинхронного двигателя в неподвижной системе координат, условие поддержания постоянного соотношения между ЭДС  и частотой напряжения статора и частотой напряжения статора  в статике является и условием стабилизации потокосцепления статора в статике является и условием стабилизации потокосцепления статора  . Регулирования класса – это регулирования с постоянным потокосцеплением в воздушном зазоре . Регулирования класса – это регулирования с постоянным потокосцеплением в воздушном зазоре  , а регулирования класса – регулирование с постоянным потокосцеплением ротора. , а регулирования класса – регулирование с постоянным потокосцеплением ротора.Если при изменении нагрузки на валу двигателя поддерживать постоянными соответствующие значения ЭДС, то механические характеристики асинхронного двигателя получат следующий вид (см. рисунок 1.13) 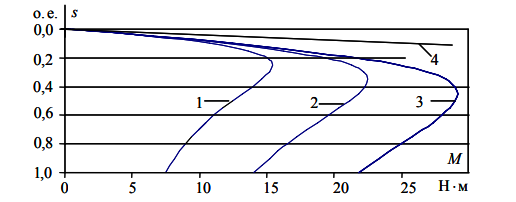 1 –  ; 2 – ; 2 –  ; 3 – ; 3 –  ; 4 – ; 4 –  ; ;Рисунок 1.19 – Механические характеристики асинхронного двигателя при различных законах регулирования Анализ механических характеристик, приведенных на рис. 1.19, показывает, что для стабилизации скорости при изменении нагрузки на валу двигателя предпочтение следует отдавать методу регулирования  . Однако такое регулирование предполагает повышение напряжения . Однако такое регулирование предполагает повышение напряжения  по сравнению с номинальным, при всех значениях нагрузки, что в большинстве случаев приводи к насыщению магнитной цепи асинхронного двигателя и его перегреву. Поэтому на практике наибольшее распространение получили такие способы частотного регулирования скорости, как по сравнению с номинальным, при всех значениях нагрузки, что в большинстве случаев приводи к насыщению магнитной цепи асинхронного двигателя и его перегреву. Поэтому на практике наибольшее распространение получили такие способы частотного регулирования скорости, как  , ,  , ,  . При регулировании скорости в классе законов необходимо повышать фазное напряжение только на величину падения напряжения . При регулировании скорости в классе законов необходимо повышать фазное напряжение только на величину падения напряжения  на активном сопротивлении обмотки статор, а способ регулирования скорости асинхронного двигателя получил название – частотное регулирование с IR – компенсацией. на активном сопротивлении обмотки статор, а способ регулирования скорости асинхронного двигателя получил название – частотное регулирование с IR – компенсацией.Система ПЧ–АД со скалярной IR – компенсацией Структурная схема системы скалярного частотного управления с IR – компенсацией приведена на рисунке 1.20. Задатчик интенсивности ЗИ формирует кривую и темп разгона двигателя. При дистанционном управлении электроприводом сигналом задания скорости является задающее напряжение. Ему соответствует задающая частота мастного управления, в этом случае управление пуском и остановом двигателя производится с панели управления преобразователя. Блок ПЧН формирует требуемую зависимости скалярного управления между частотой и напряжением преобразователя, чем и устанавливает один из принятых способов частотного регулирования скорости класса .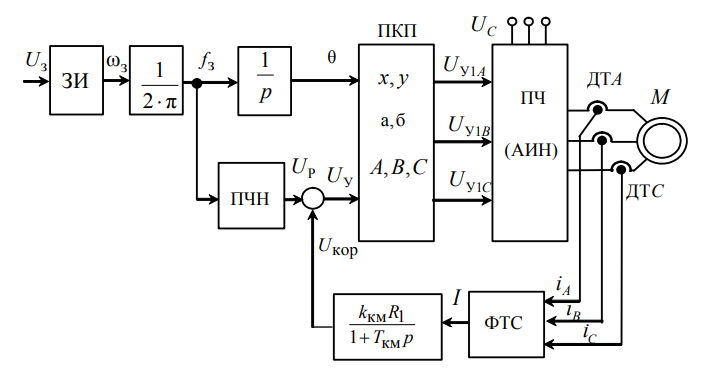 Рисунок 1.20 – Структурная схема частотного управления со скалярной IR – компенсацией При таком виде скалярного управления, сигнал управления является суммой сигналов регулирования и положительной обратной связи по току:  , (1.21) , (1.21)где  – коэффициент положительной обратной связи по току; – коэффициент положительной обратной связи по току; – активное сопротивление обмоток статора асинхронного двигателя, Ом; – активное сопротивление обмоток статора асинхронного двигателя, Ом; – сигнал, пропорционально действующим значениям токов – сигнал, пропорционально действующим значениям токов  , ,  , ,  обмоток статора асинхронного двигателя. обмоток статора асинхронного двигателя.Сигнал управления является входным для прямого координатного преобразователя (ПКП), на выходе которого формируются три синусоидальных напряжения  , ,  , ,  , сдвинутые относительно друг друга на угол ∓2π/3, с амплитудами, пропорциональными напряжению управления. Сигналы , , формируют фазные напряжения на выходе автономного инвертора напряжения (АИН). , сдвинутые относительно друг друга на угол ∓2π/3, с амплитудами, пропорциональными напряжению управления. Сигналы , , формируют фазные напряжения на выходе автономного инвертора напряжения (АИН).Принцип действия системы заключается в следующем. Предположим, что асинхронный двигатель работал на характеристике 1 (см. рисунок 1.21) с моментом на валу двигателя, равным  . Если момент на валу двигателя увеличится и станет равным . Если момент на валу двигателя увеличится и станет равным  , то возрастет и ток каждой фазы статора двигателя , , , а следовательно, и сигнал формирователя тока статора (ФТС). Увеличится и корректирующее напряжение положительной обратной связи , то возрастет и ток каждой фазы статора двигателя , , , а следовательно, и сигнал формирователя тока статора (ФТС). Увеличится и корректирующее напряжение положительной обратной связи  , вычисляемо по выходному току звеном с передаточной функцией. , вычисляемо по выходному току звеном с передаточной функцией.  Рисунок 1.21 – Механические характеристики электропривода (кривые 1,2) и результирующая характеристика 3 – при наличии положительной обратной связи С ростом корректирующего сигнала возрастает и сигнал управления, что приводит в конечном итоге к росту фазного напряжения асинхронного двигателя и увеличению его критического момента, который пропорционален квадрату фазного напряжения –  . Характеристика 2 соответствует возросшему фазному напряжение. В результате действия положительной обратной связи, электропривод формирует механическую характеристику замкнутой системы3, жестокость которой определяется коэффициентом . . Характеристика 2 соответствует возросшему фазному напряжение. В результате действия положительной обратной связи, электропривод формирует механическую характеристику замкнутой системы3, жестокость которой определяется коэффициентом .Основным недостатком данной системы является то, что меняется только модуль напряжения обмоток статора асинхронного двигателя без изменения фазного угла, что приводит к непостоянству векторов ЭДС и потокосцепления. Возможны дополнительные возмущения в системе, связанные с изменением фазного угла вектора потокосцепления. Несмотря на этот недостаток, разомкнутые структуры частотного регулирования скорости на основе автономных инверторов напряжения со скалярной IR – компенсацией находят широкое применение в приводах длительного режимах работы с диапазоном регулирования  Система ПЧ–АД с положительной обратной связью по току в каналах регулирования напряжения и частоты Сигналом тока можно воздействовать как на канал напряжения, так и на канал частоты. Функциональная схема электропривода с положительными обратными связями в канале регулирования напряжения и частоты приведена на рисунке 1.22. При одновременном воздействии на канал частоты (компенсация скольжения) и компенсации момента поддержание скорости на требуемом уровне можно обеспечить при меньших значениях напряжения.  Рисунок 1.22 – Функциональная схема частотного управления асинхронным электроприводом с компенсацией момента и скольжения Система электропривода работает следующим образом. Асинхронный двигатель работа на характеристике 1 (см. рисунок 1.23) с моментом на валу двигателя, равным . Если момент на валу двигателя увеличится и станет равным , то возрастет и ток каждой фазы статора двигателя , , , а следовательно, и сигнал формирователя тока статора (ФТС). Увеличится и корректирующее напряжение положительной обратной связи , вычисляемо по выходному току звеном с передаточной функцией.С ростом сигнала положительной обратной связи возрастает, как сигнал управления канала напряжения, что приводит в конечном итоге к росту фазного напряжения асинхронного двигателя, так и сигнал управления канала частоты, что приводит к росту частоты. Характеристика 2 соответствует возросшему фазному напряжения и увеличенной частоте обмоток статора асинхронного двигателя.  Рисунок 1.23 – Механические характеристики электропривода (кривые 1,2) и результирующая характеристика – 3 при наличии компенсации момента и скольжения. В результате действия корректирующих положительных обратных связей, электропривод формирует механическую характеристику замкнутой системы – 3. Анализ характеристик, приведенных выше, показывает, что в случае дополнительного воздействия на канал частоты можно обеспечить поддержание скорости на требуемом уровне при малых фазного напряжения. В результате удается снизить магнитный поток двигателя, а при правильной настройке параметров обратных связей – снизить и температурный режим работы двигателя. Установлено, что структуры с компенсацией частоты оказываются чувствительными к изменению параметров настрое, а с сильной положительной обратной связью могут оказаться неустойчивыми. В рассмотренной системе компенсация момента необходима только в зоне низких значений частот. Поэтому с ростом задающей частоты коэффициент можно уменьшить вплоть до нуля, меняя его, например, в функции задания частоты.Система ПЧ–АД с отрицательной обратной связью по скорости Функциональная схема система преобразователь частоты – асинхронный двигатель с отрицательной обратной связью по скорости приведена на рисунке 1.24.  Рисунок 1.24 – Система ПЧ – АД с отрицательной обратной связью по скорости В такой системе регулирования питание двигателя осуществляется от двухзвенного преобразователя частоты с АИН. Управляющими воздействиями на асинхронный двигатель являются частота и напряжения на статоре. Существенными достоинством АИН является независимость выходного напряжения от частоты и от момента нагрузки. Это упрощает формирование необходимого закона частотного регулирования, особенно если напряжение регулируется только в функции частоты. Характер нагрузки (или закона регулирования частоты от напряжения) учитывается звеном ПЧН. Особенности звена ПЧН электроприводов с микропроцессорным управлением позволяют учесть характер нагрузки в большом диапазоне регулирования скорости. Сигнал задания на скорость воздействует на электропривод через задатчик интенсивности ЗИ. Система регулирования относится к классу систем с полузамкнутым управлением. Метод полузамкнутого управления реализуется элементом FU, формирующим сигнал задания частоты  двухзвенного преобразователя частоты с инвертором напряжения. Этот сигнал складывается из сигнала задания частоты двухзвенного преобразователя частоты с инвертором напряжения. Этот сигнал складывается из сигнала задания частоты  и корректирующего сигнала и корректирующего сигнала  , являющегося выходным сигналом регулятора скорости. , являющегося выходным сигналом регулятора скорости. В быстрых процессах действует сигнал управления заданной частоты , что соответствует разомкнутому управлению. В медленных процессах действует обратная связь  по измеренной угловой скорости асинхронного двигателя, что соответствует замкнутому управлению. по измеренной угловой скорости асинхронного двигателя, что соответствует замкнутому управлению. , (1.22) , (1.22)где  – коэффициент усиления регулятора скорости. – коэффициент усиления регулятора скорости.Механические характеристики, поясняющую работу электропривода, приведены на рисунке 1.25. Предположим, что двигатель работал на характеристике с сигналом задания частоты инвертора  с моментом с моментом  , что соответствует скорости , что соответствует скорости  электропривода. Предположим, что нагрузка на валу двигателя возросла и стала равной электропривода. Предположим, что нагрузка на валу двигателя возросла и стала равной  . .  Рисунок 1.25 – Механические характеристики асинхронного электропривода Так как момент двигателя  стал меньше момента сопротивления стал меньше момента сопротивления  на его валу, то в соответствии с уравнением движения скорость электропривода начинает падать. Это приводит к тому, что сигнал отрицательной обратной связи по скорости уменьшается. В этом случае сигнал корректирующей частоты увеличивается и, следовательно, возрастает сигнал задания частоты инвертора. Электропривод переходит на механическую характеристику, соответствующую новому сигналу задания частоты инвертора. Новая точка установившейся работы электропривода соответствует скорости на его валу, то в соответствии с уравнением движения скорость электропривода начинает падать. Это приводит к тому, что сигнал отрицательной обратной связи по скорости уменьшается. В этом случае сигнал корректирующей частоты увеличивается и, следовательно, возрастает сигнал задания частоты инвертора. Электропривод переходит на механическую характеристику, соответствующую новому сигналу задания частоты инвертора. Новая точка установившейся работы электропривода соответствует скорости  . Результирующая характеристика замкнутой системы электропривода – более жесткая, а ее жесткость определяется общим коэффициентом усиления контура регулирования скорости. . Результирующая характеристика замкнутой системы электропривода – более жесткая, а ее жесткость определяется общим коэффициентом усиления контура регулирования скорости. |