Модернизация лабораторного стенда с преобразователем частоты фирмы АВВ. Модернизация лабораторного стенда с преобразователем частоты фирмы авв
 Скачать 3.27 Mb. Скачать 3.27 Mb.
|

|
1.2 Частотное регулирование скорости асинхронного двигателя Частотно-регулируемый электропривод стал в настоящее время основной системой регулирования в электроприводе. Он широко применяется как в низковольтных система до 400 В, так и высоковольтных, с напряжением 6 и 10 кВ. В отличи от нерегулируемых асинхронных электроприводов, где двигатель получит питание от сети трехфазного переменного тока со стандартными значениями частоты и величины напряжения, в системах частотно-регулируемого электропривода, двигатель получает питание от преобразователя частоты с регулируемыми значениями частоты и амплитуды напряжения подаваемого к обмоткам статора асинхронного двигателя [2]. Как видно из формулы (1.3), единственным способом плавного изменение частоты вращения поля статора – является изменение частоты питавшего напряжения. Изменение количества пар полюсов позволяет получать 2-4 фиксированные скорости, но не дает возможности плавного регулирования скорости поля статора в широких пределах. Если скорость вращения поля статора будет постоянной, то скорость вращения вала двигателя будет также примерно постоянной, т. к. на рабочей части механической характеристик двигателя. Жесткость характеристики велика, и скольжение двигателя будет составлять всего несколько процентов (см рисунок 1.7 участок 1–2). Если будем регулировать частоту питающего напряжения, снижать ее как показано на рисунке 1.8, то скорость вращения поля статора будет снижаться пропорционально частоте и механические характеристики двигателя будут перемещаться вниз параллельно друг другу. Если при этом поддерживать величину потока статора двигателя постоянной, то и перегрузочная способность двигателя будет оставаться постоянной. 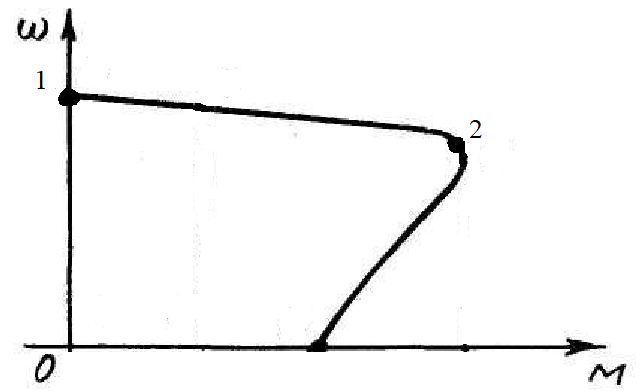 Рисунок 1.7 – Естественная механическая характеристика асинхронного двигателя 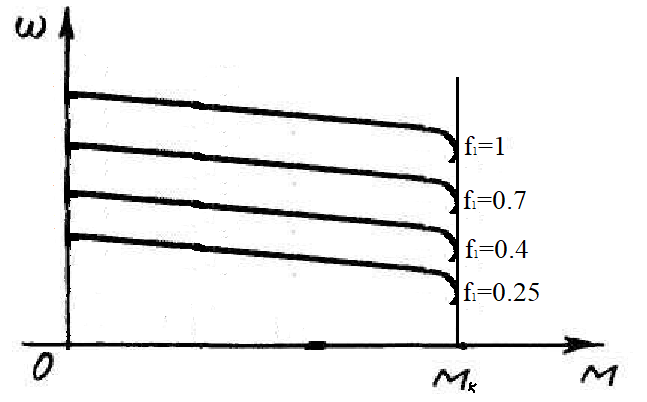 Рисунок 1.8 – Механические характеристика асинхронного двигателя при частотном регулировании Такое регулирование очень удобно, меняя частоту питающего напряжения мы плавно меняем скорость двигателя. Благодаря тому что жёсткость характеристик остается постоянной и высокой, скорость двигателя мало зависит от момента на его валу, что повышает точность регулирования скорости. Важным обстоятельством является возможность плавного пуска двигателя. При пуске двигателя от сети, возникают большие пусковые токи (5 –7)  , ударные знакопеременные моменты, в цепи ротора выделяется большое количество энергии, что вызывает его перегрев. При частотном пуске, частота и величина питающего напряжения плавно увеличивается от нуля до номинального значения, и двигатель всегда работает, в том числе и при пуске, на рабочем участке механической характеристики, при этом отсутствуют все негативные явления свойственные прямому пуску асинхронных короткозамкнутых двигателей. , ударные знакопеременные моменты, в цепи ротора выделяется большое количество энергии, что вызывает его перегрев. При частотном пуске, частота и величина питающего напряжения плавно увеличивается от нуля до номинального значения, и двигатель всегда работает, в том числе и при пуске, на рабочем участке механической характеристики, при этом отсутствуют все негативные явления свойственные прямому пуску асинхронных короткозамкнутых двигателей.Необходимо отметить то, что при снижении частоты питающего напряжения (вниз от номинальной) снижать так же амплитуду напряжения на выходе преобразователя частоты. Это связано с необходимостью поддержания потока статора двигателя постоянной. Назначением систем регулирования скорости состоит в обеспечении требуемых режимов работы двигателя с определенными показателями качества регулирования. К основным показателям качества относятся: Диапазон регулирования скорости; Плавность регулирования; Экономичность регулирования; Точность регулирования; Стабильность угловой скорости; Допустимая нагрузка двигателя; Для электроприводов, работающих в динамических режимах, предъявляются отдельные требования, определяемые динамическими показателями качества: Время переходного процесса; Перерегулирование; Колебательность. Выбор системы регулирования определяется требованиями, предъявляемыми к электроприводу. Прежде всего это относится к диапазону регулирования скорости. Под диапазоном регулирования скорости, понимается отношение максимальной скорости к минимальной с учетом максимально возможного момента нагрузки (формула 1.6)  (1.6) (1.6)Принцип работы и структура преобразователя частоты 1.2.1.1 Структура преобразователя частоты Преобразователь частоты – это электрическое устройство, служащее для преобразования электрической энергии переменного тока с постоянными стандартными значениями частоты и напряжения, в электрическую энергию с переменными регулируемыми значениями частоты и напряжения. Современные промышленные преобразователи частоты строятся на основе силовых полупроводниковых приборов (диодов, транзисторов, тиристоров). 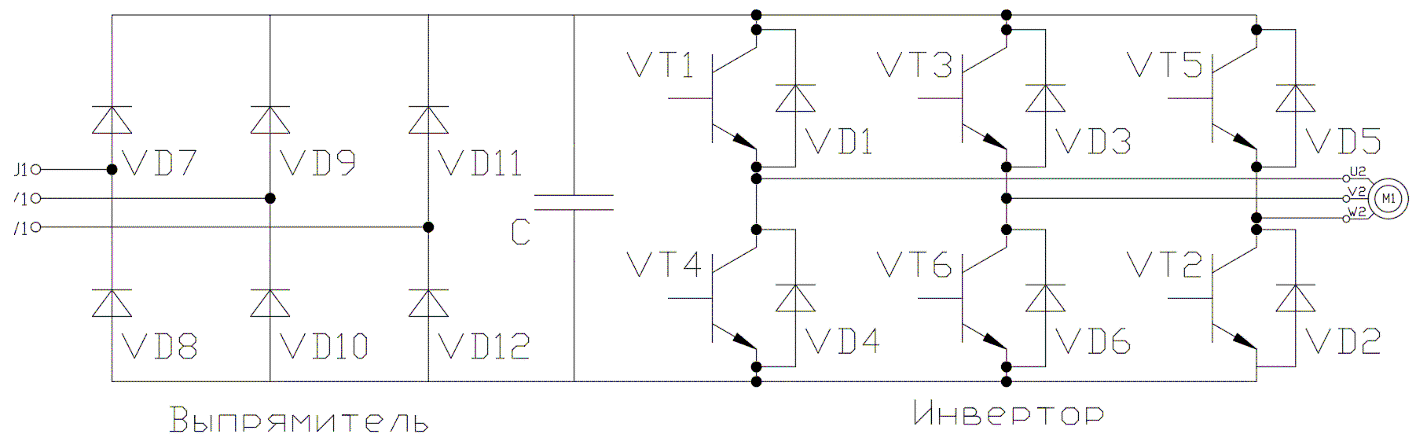 Рисунок 1.9 – Схема питания асинхронного двигателя от преобразователя частоты Силовая часть преобразователя состоит из двух основных звеньев: неуправляемый выпрямитель (трехфазный диодный мост) и инвертора напряжения (см. рисунок 1.9). В выпрямителе, производится преобразование энергии переменного тока стандартной чистоты в энергию постоянного тока. В инверторе, производится преобразование энергии постоянного тока, в энергию переменного тока, с новыми регулируемыми значениями частоты и напряжения. Важным узлом преобразователя частоты является фильтр, устанавливаемый в цепи постоянного тока. Фильтр выполняет три функции: сглаживает пульсации выпрямленного напряжения, является источником реактивной мощности циркулирующих в цепях обмоток статора асинхронного двигателя, и запасает энергию генерируемою двигателем при работе в режиме торможения. 1.2.1.2 Принцип работы автономного инвертора Рассмотрим работу автономного инвертора напряжения [3]. В каждый момент времени открыт либо один транзисторный ключ в анодной группе и два ключа в катодной группе, либо наоборот. При этом продолжительность работы каждого ключа составляет половину периода выходного напряжения преобразователя. 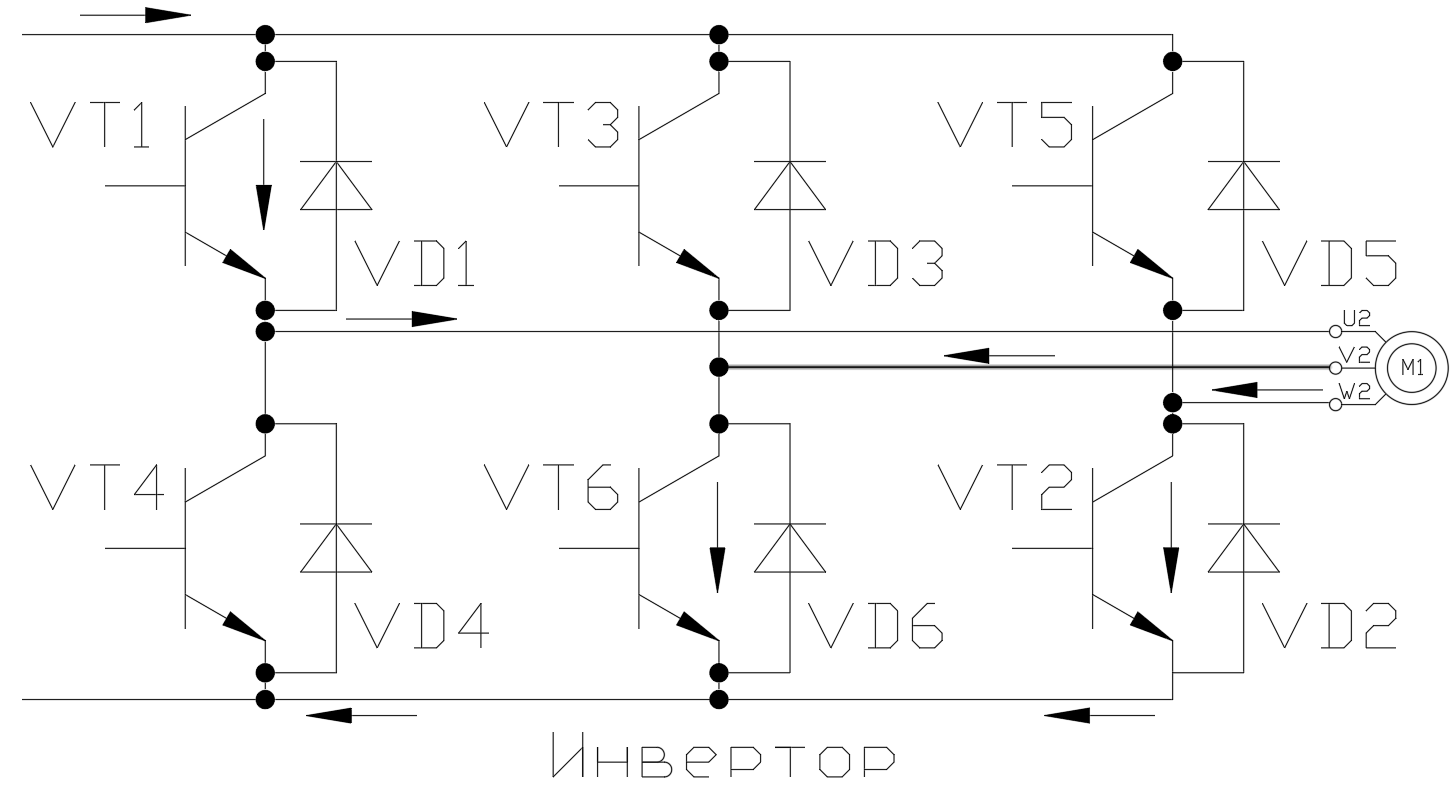 Рисунок 1.10 – Схема инвертора при включенных транзисторах VT1,VT2,VT6 Пусть в некоторый момент времени открыты транзисторы VT1,VT2,VT6 (см рисунок 1.10). Ток будет протекать по всем трем фазам обмотки статора двигателя (направления токов показаны стрелками). По обмотке фазы U, от начала к концу обмотки ( в положительном направлении), по обмоткам V и W в отрицательном направлении. Две третьи выпрямленного напряжения прикладывается к обмотке фазы А, и одна треть к фазам В и С. Затем происходит смена включенных транзисторов, ключ VT6 запирается, а ключ VT3 открывается. При запекании ключа VT6, ток в фазе В не может мгновенно измениться из-за наличия индуктивности в обмотке и некоторое время будет протекать через диод VD3 замыкаясь на конденсатор. После включения ключа VT3, ток будет протекать по фазам U и V в прямом направлении и по фазе W в обратном. После запирания ключа VT1 и включении ключа VT4, ток будет протекать через обмотку фазы V в прямом направлении и через обмотки U и W в обратном. За один период выходного напряжения происходит шесть коммутаций транзисторных ключей . При этом фазное напряжение, прикладываемое к обмоткам двигателя, будет иметь вид синусоиды (см. рисунок 1.11). Частота выходного напряжения преобразователя определяется частотой переключения транзисторных ключей инвертора, которая задается системой управления преобразователя частоты. 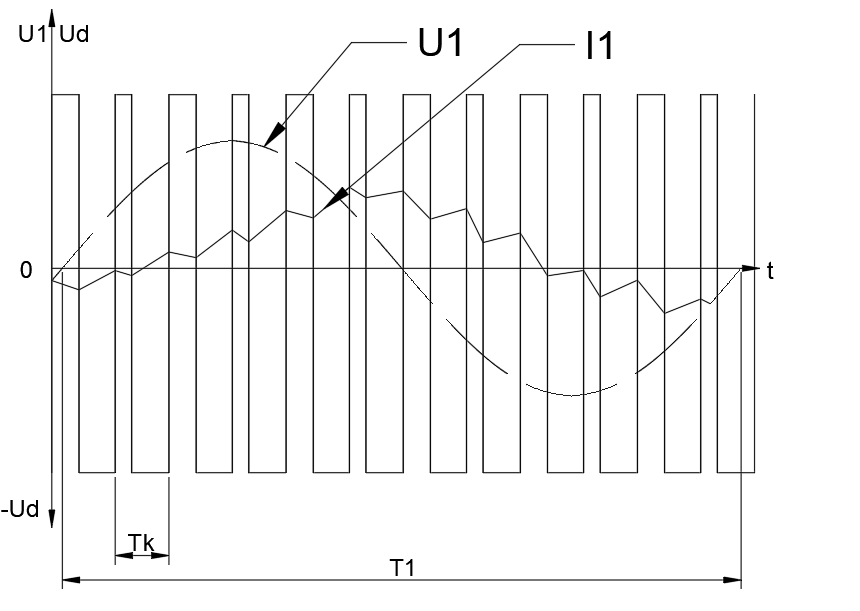 Рисунок 1.11 – Принцип широтно-импульсной модуляции Так же необходимо одновременно регулировать величину выходного напряжения. Регулирование величины напряжения производится методом широтно-импульсной модуляции (ШИМ). Задачей широтно-импульсного регулирования является регулирование средней величины выходного напряжения и коррекция его формы приближающаяся к синусоидальной. ШИМ реализуется следующим образом: в периоды включенного состояния транзисторного ключа, в соответствии с выходной частотой, каждый ключ включается и запирается с высокой несущей частотой порядка 2–10 кГц. Несущая частота не меняется, но изменяется продолжительность включенного состояния транзистора, т.е. изменяется ширина импульса открытого состояния транзистора. Изменяя скважность импульсов, можно регулировать среднюю величину выходного напряжения преобразователя частоты и обеспечивать близкое к синусоиде изменение напряжения в пределах заданного периода частоты выходного напряжения. Скважность импульсов γ – это отношения времени включенного состояния к периоду ШИМ. Фактически, напряжения на выходе инвертора имеет вид последовательности прямоугольных импульсов с амплитудой равной величине выпрямленного напряжения, с переменной длительностью, так что среднее напряжение имеет синусоидальный характер с требуемой амплитудой. 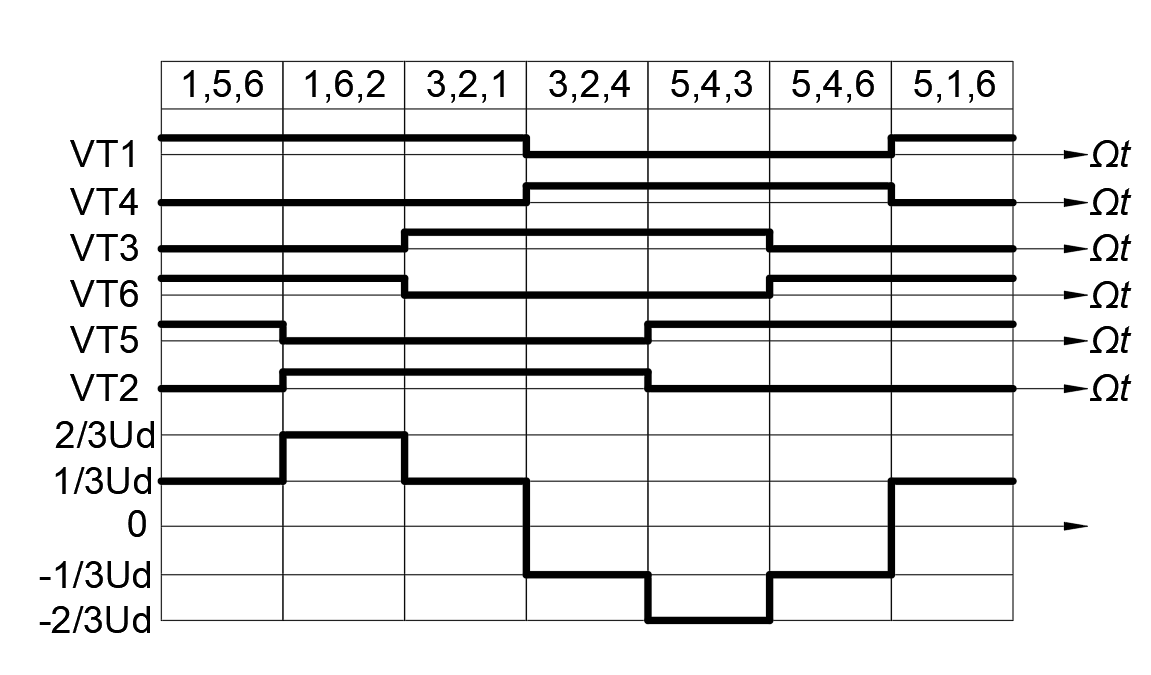 Рисунок 1.12 – Диаграмма переключений ключей 1.2.1.3 Тормозной режим работы асинхронного двигателя при питании от преобразователя частоты Асинхронный двигатель, при питании от преобразователя частоты может работать в двигательном или тормозном режимах. При работе в тормозном режиме асинхронная машина работает как генератор, вырабатывая активную мощность. Поскольку в стандартных схема преобразователей частоты, на его входе установлен неуправляемый выпрямитель, отдать регулируемую при торможении мощность в сеть невозможно. Для реализации этой мощности в схемах предусматривают тормозной резистор (см. рисунок 1.13). Тормозной резистор включается через транзистор VT7. Когда двигатель работает в тормозном режиме, генерируемый ток через диоды VD1–VD6 замыкаются на фильтр заряжая его. Напряжение на конденсаторе повышается, и когда оно на 10% превысит номинальное значение, транзистор VT7 открывается, и мощность торможения сбрасывается в тормозной резистор, вызывая его нагрев. В этом случае энергия торможения расходуется на нагрев резистора. 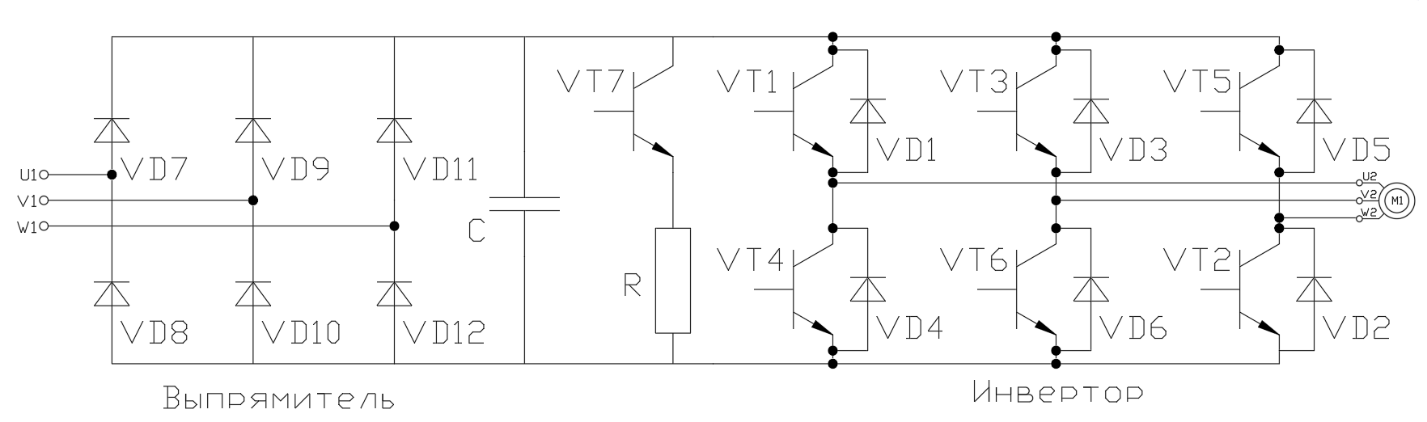 Рисунок 1.13 – Схема преобразователя частоты с тормозным резистором Энергию торможения можно использовать полезно, возвращая ее в питающую сеть, это целесообразно, когда привод длительно время работает в тормозном режиме, например при спуске груза в подъемно-транспортных механизмах. Для возврата энергии в питающую сеть необходимо параллельно неуправляемому выпрямителю включить рекуператор (см. рисунок 1.14). Рекуператор представляет собой инвертор напряжения на транзисторах, коммутация которых производится с частотой питающей сети. Использование рекуператора существенно поднимает цену преобразователя. На входе преобразователя частоты обычно устанавливают реактор служащий для уменьшения токов короткого замыкания и уменьшающий содержание высших гармоник тока, в цепях питания преобразователя частоты. Поскольку в цепи выпрямленного тока преобразователя частоты установлен конденсатор достаточно большой емкости, то при включении преобразователя частоты необходимо ограничить ток заряда конденсатора. Это достигается включением в цепь выпрямленного тока ограничивающего резистора, который затем шунтируется контактором, и не участвует в работе преобразователя частоты. Для улучшения гармонического состава выходного напряжения иногда необходима установка выходного трехфазного фильтра. Такой фильтр тоже поднимает цену преобразователя, однако он улучшает условия работы асинхронного двигателя. Иногда он необходим, когда двигатель и преобразователь установлены в далеке друг от друга и длина питающего кабеля превышает 100 метров. 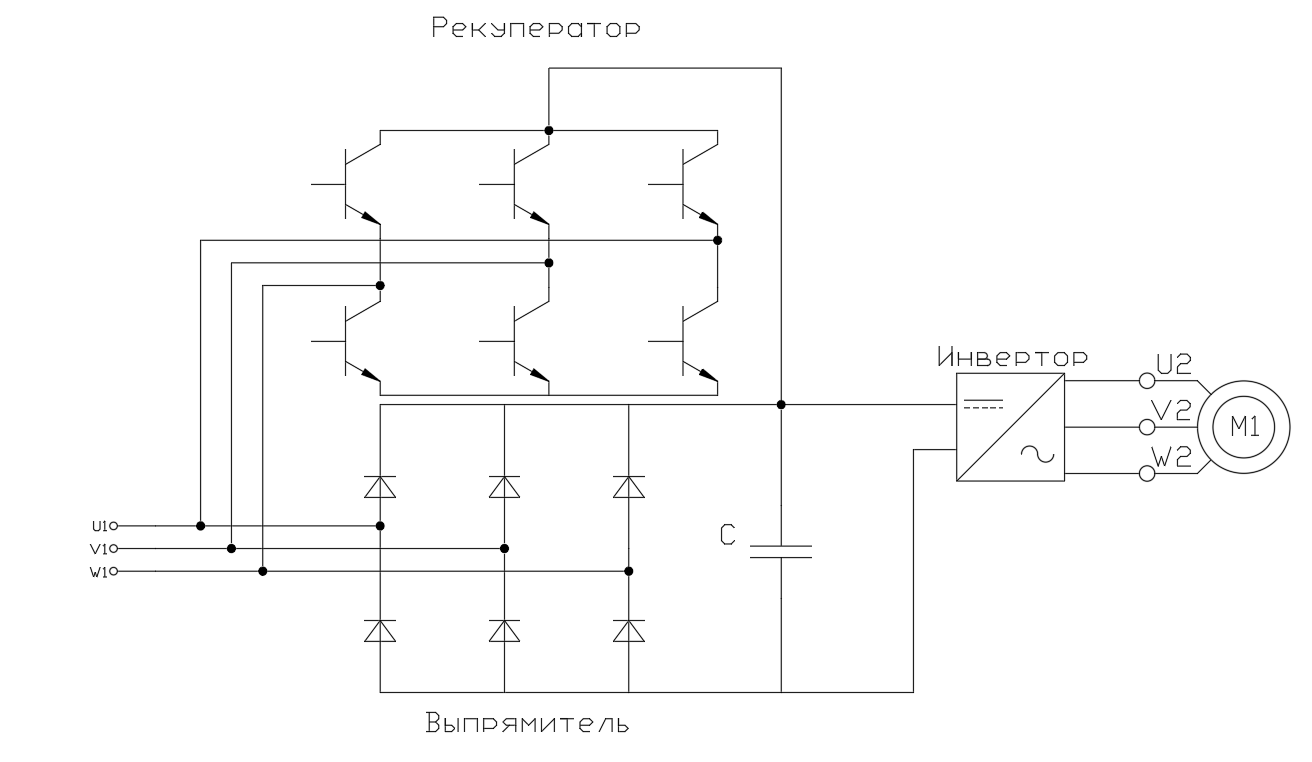 Рисунок 1.14 – Схема подключения рекуператора 1.3 Скалярный режим управления Для электроприводов, работающих с ограниченным диапазоном регулирования скорости и в тех случаях, когда не требуются высокие показатели по быстродействию и точности регулирования применяются более простые скалярные системы регулирования [4]. Скалярным данный режим называется, потому что они содержат два канала регулирования, канал регулирования скорости вращения электромагнитного поля статора посредством изменения частоты подводимого напряжения, и канал регулирования потока статора, посредством одного из возможных режимов. Если одновременно с частотой изменять и переменное напряжение обмоток статора асинхронного двигателя, то появляется возможность реализовать в системах преобразователь частоты-асинхронный двигатель (ПЧ–АД) различные законы регулирования скорости. По характеру зависимости момента механизма от его скорости, можно выделить три наиболее часто встречающихся механических характеристик производственных механизмов: не зависящая от угловой скорости механическая характеристика; нелинейно-спадающая механическая характеристика или работа с постоянной мощностью; нелинейно-возрастающая механическая характеристика или вентиляторная нагрузка. В частотно-регулируемых электроприводах переменного тока для соответствующих моментов производственных механизмов можно сформировать электромагнитные моменты двигателей. Например, при постоянном моменте нагрузки (  ) управление напряжением и частотой тока статора асинхронного двигателя должно осуществляется по закону ) управление напряжением и частотой тока статора асинхронного двигателя должно осуществляется по закону  . (1.7) . (1.7)При нелинейно-спадающей нагрузке  – – закон управления напряжением и частотой принимает вид – – закон управления напряжением и частотой принимает вид . (1.8) . (1.8)Наконец, при «вентиляторной» нагрузке  напряжения и частота должны изменятся в соответствии с зависимостью напряжения и частота должны изменятся в соответствии с зависимостью . (1.9) . (1.9)Законы управления (1.3) – (1.5), связывающие напряжения. Частоту и характер нагрузки, описывается формулой М.П. Костенко:  , (1.10) , (1.10)где  – номинальное напряжение питающей сети, В; – номинальное напряжение питающей сети, В; – напряжение на выходе преобразователя частоты; – напряжение на выходе преобразователя частоты; – статический момент на валу асинхронного двигателя при данной частоте – статический момент на валу асинхронного двигателя при данной частоте  . .Из (1.10) следует, что , например, для привода, работающего с постоянной мощность, увеличение скорости в четыре раза приводит к уменьшение статического момента также в четыре раза. При этом потери в стали и на намагничивание уменьшаются, а перегрузочная способность двигателя остается примерно постоянной: , (1.11) , (1.11)где  – критический момент двигателя, Н – критический момент двигателя, Н м. м.Таким образом, для того чтобы наиболее эффективно реализовать принципы частотного управления асинхронным двигателем, необходимо в соответствии с видом нагрузки на валу двигателя управлять напряжением, подводимым к статору, взаимосвязано с изменением частоты тока статора. Перечисленные режимы управления достаточны для большинства механизмов. Однако закон управления (1.7) справедлив только в первом аналитическом приближении, когда активным сопротивлением статора можно пренебречь. В действительности, при малых значениях частоты (  падение напряжение на сопротивлениях статора существенно снижает величину напряжения, прикладываемого к контуру намагничивания, и критический момент асинхронного двигателя уменьшается. При более точном анализе, учитывающем падение напряжение на сопротивлении статора, механические характеристики принимают вид, показанный на рисунке 1.15. Так, например, при законе управления , предполагающем постоянство критического момента, наблюдается его снижение при уменьшении частоты . падение напряжение на сопротивлениях статора существенно снижает величину напряжения, прикладываемого к контуру намагничивания, и критический момент асинхронного двигателя уменьшается. При более точном анализе, учитывающем падение напряжение на сопротивлении статора, механические характеристики принимают вид, показанный на рисунке 1.15. Так, например, при законе управления , предполагающем постоянство критического момента, наблюдается его снижение при уменьшении частоты .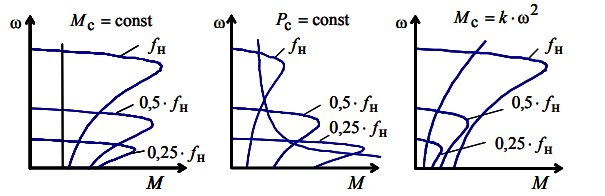 Рисунок 1.15 – Механические характеристики производственных механизмов и электроприводов преобразователь частоты – асинхронный двигатель Функциональная схема электропривода, выполненного по системе ПЧ – АД, реализующая различные законы управления класса  , приведена на рисунке 1.16. , приведена на рисунке 1.16.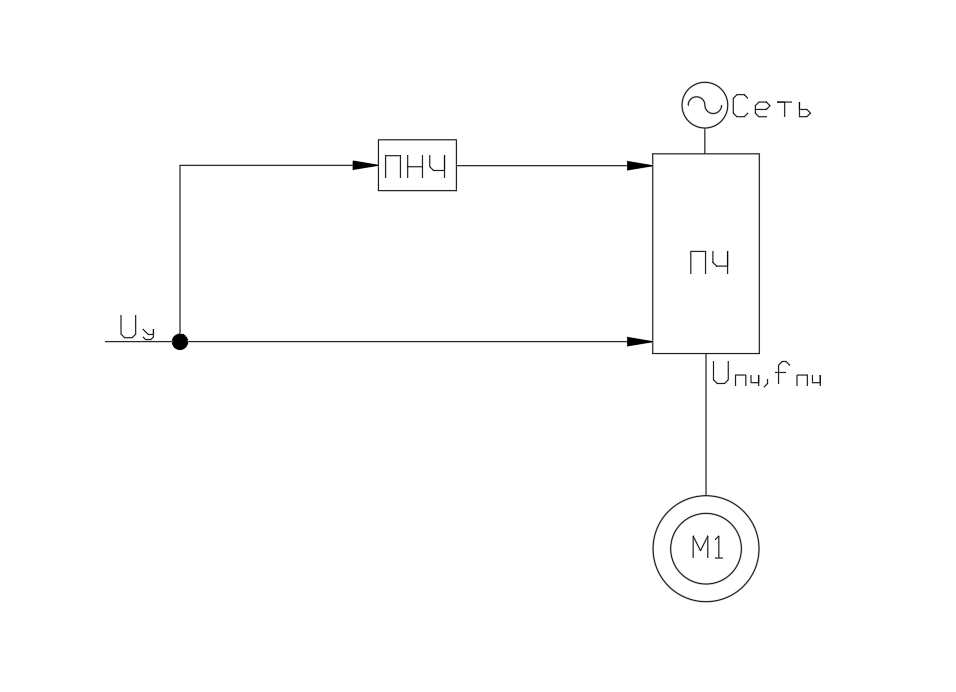 Рисунок 1.16 – Функциональная схема скалярного регулирования без обратной связи по скорости В этой схеме сигнал управления  определяет модуль напряжения статора. Преобразователь напряжение – частота (ПНЧ) обеспечивает изменение относительной частоты определяет модуль напряжения статора. Преобразователь напряжение – частота (ПНЧ) обеспечивает изменение относительной частоты  в функции от напряжения управления по одному из установленных законов регулирования. в функции от напряжения управления по одному из установленных законов регулирования.При частотном регулировании скорости асинхронного двигателя необходимо учитывать, что реактивные сопротивления двигателя зависят от частоты питающего напряжения. При снижении частоты активное сопротивление статора становится соизмеримым с реактивными сопротивлениями машины. Электромеханическая характеристика , определяющая зависимость приведенного тока ротора от скольжения,  , (1.12) , (1.12)где – фазное напряжение обмоток статора синхронного двигателя; – относительное значение частоты питающего напряжения. – относительное значение частоты питающего напряжения.Электромеханические характеристики  , построенные по (1.8) для трех законов регулирования, приведены на рисунке 1.17, где , построенные по (1.8) для трех законов регулирования, приведены на рисунке 1.17, где  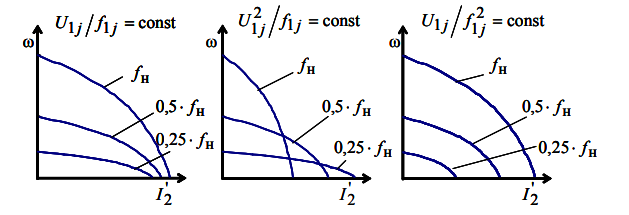 Рисунок 1.17 – Электромеханические характеристики для трех законов регулирования Для короткозамкнутого асинхронного двигателя одной из основных является электромеханические характеристика  , отражающая зависимость тока статора от скорости ( скольжения s). Ток статора находится путем сложения вектора тока намагничивания и вектора тока ротора. Обычно это производится с помощью круговой диаграммы. , отражающая зависимость тока статора от скорости ( скольжения s). Ток статора находится путем сложения вектора тока намагничивания и вектора тока ротора. Обычно это производится с помощью круговой диаграммы. Полагая ток намагничивания асинхронного двигателя реактивным, ток статора через приведённый ток ротора можно найти по формуле  , (1.13) , (1.13)где  находится по формуле: находится по формуле: . (1.14) . (1.14)Механическая характеристика асинхронного двигателя при переменных значениях величины и частоты напряжения питания определяется следующим выражением:  . (1.15) . (1.15)Механическая характеристика асинхронного двигателя имеет критический момент и критическое скольжение, которые определяется обычным способом, положив  , тогда критический момент , тогда критический момент , (1.16) , (1.16)где  – синхронная угловая скорость, рад/с; – синхронная угловая скорость, рад/с;Критические скольжение  . (1.17) . (1.17)Знак «+» означает, что критический момент и скольжение относятся к двигательному режиму, знак «–» – к генераторному режиму рекуперативного торможения. |