Модернизация лабораторного стенда с преобразователем частоты фирмы АВВ. Модернизация лабораторного стенда с преобразователем частоты фирмы авв
 Скачать 3.27 Mb. Скачать 3.27 Mb.
|

|
Векторное управление Преобразование координат в системах векторного управления Реальный асинхронный двигатель имеет на статоре, как пра- вило, три обмотки, соединенные в звезду или треугольник, сдвинутые в пространстве на 120 градусов. Для создания вращающегося электромагнитного поля в зазоре, обмотки статора двигателя питаются тремя гармоническими напряжениями, сдвинутыми во времени на 120 эл. град. При питании асинхронного двигателя от преобразователя частоты эти три напряжения получаются на выходе преобразователя. Для управления преоб разователем частоты требуются три взаимно сдвинутых на 120 эл. град. гармонических сигнала управления  , ,  , ,  . .В регулируемом электроприводе заданием на скорость асинхронного двигателя является аналоговый сигнал задающего напряжения  , изменяющийся от 0 до 10 вольт. Следовательно, в регулируемом электроприводе в систему управления необходимо включить преобразователь, осуществляющий операцию преобразования аналогового сигнала в три гармонических сигнала с заданной частотой. Такую операцию осуществляет прямой координатный преобразователь (ПКП). , изменяющийся от 0 до 10 вольт. Следовательно, в регулируемом электроприводе в систему управления необходимо включить преобразователь, осуществляющий операцию преобразования аналогового сигнала в три гармонических сигнала с заданной частотой. Такую операцию осуществляет прямой координатный преобразователь (ПКП).Три переменных напряжения, подключенные к обмоткам статора асинхронного двигателя, вызывают протекание по ним трех токов, сдвинутых во времени на 120 эл. град. Для преобразования гармонических сигналов токов и напряжений асинхронного двигателя в сигналы обратных связей также необходимы преобразователи. Операцию преобразования гармонических сигналов в аналоговые осуществляют обратные координатные преобразователи (ОКП). В общем случае функциональная схема системы векторного управления асинхронным двигателем, включающая в себя прямой и обратный координатные преобразователи, представлена на рис. 5.1. Это позволяет строить систему управления асинхронным электродвигателем во вращающейся системе координат, где действуют аналоговые сигналы, сам же асинхронный двигатель, управляемый гармоническими сигналами, представляется (и работает) в неподвижной системе координат. 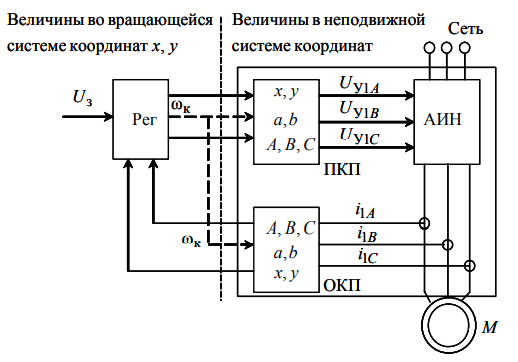 Рисунок 1.26 – Функциональная схема системы векторного управления асинхронным двигателем Основные принципы векторного управления Системы регулирования скорости асинхронного двигателя, знакомые нам, не обеспечивают постоянство потокосцепления статора и ротора ни в динамике, ни в статике. Это является основной причиной колебательности электромагнитного момента асинхронного двигателя при его пусках и регулировании скорости. Указанный недостаток устраняется в системах векторного управления. Известно, что наилучшая управляемость в электроприводе может быть достигнута, если обеспечить управление его электромагнитным моментом. Таким образом, если управлять координатами переменных, входящими в эти выражения, то можно получить контролируемые значения его электромагнитного момента. Таких переменных в каждом уравнении четыре. Однако если использовать систему координат, постоянно ориентированную по направлению какого-либо вектора, определяющего электромагнитный момент асинхронного двигателя, то проекция этого вектора на другую ось декартовой системы координат будет равно нулю. Тогда второе слагаемое, входящее в выражение для определения электромагнитного момента асинхронного двигателя, также будет равно нулю. Например, при ориентации вектора потокосцепления ротора  по действительной оси вращающейся системы координат, проекция вектора на действительную ось xбудет определяться уравнением по действительной оси вращающейся системы координат, проекция вектора на действительную ось xбудет определяться уравнением  . .Проекция этого же вектора на мнимую ось  будет равна нулю. В этом случае уравнения для вращающейся системы координат, определяющие электромагнитный момент двигателя выглядят так: будет равна нулю. В этом случае уравнения для вращающейся системы координат, определяющие электромагнитный момент двигателя выглядят так: ; (1.23) ; (1.23) ; (1.24) ; (1.24)Очевидно, что построение системы управления по уравнению (1.24) вызовет дополнительные трудности, так как ни ток ротора, ни потокосцепление ротора у асинхронного короткозамкнутого двигателя непосредственно измерить нельзя. Построить систему управления асинхронным электроприводом в соответствии с уравнением (1.23) несколько проще, если косвенно определять его потокосцепление, а ток статора измерять с помощью датчиков токов фаз, затем и его составляющую вычислять с помощью обратного координатного преобразователя. В этом случае можно управлять электромагнитным моментом асинхронного двигателя, изменяя проекцию тока статора на мнимую ось. Если при этом действительную составляющую вектора потокосцепления поддерживать постоянной, то способ управления становится аналогичным управлению двигателем постоянного тока изменением напряжение обмотки якоря. Структурная схема двигателя при векторном управлении Структурная схема асинхронного двигателя при векторном управлении, составленная на основании уравнения (1.23), оказывается близкой к структуре двигателя постоянного тока независимого возбуждения. Если учесть уравнение движения электропривода  , (1.25) , (1.25)то структурная схема асинхронного двигателя при векторном управлении будет иметь вид, приведенный на рис. 1.27, а. На рис. 1.27, б приведена схема формирования момента в двигателе постоянного тока. 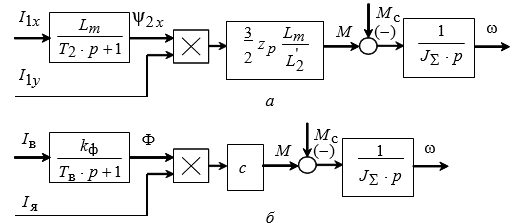 Рисунок 1.27 – Структурные схемы асинхронного двигателя при векторном управлении (а) и двигателя постоянного тока независимого возбуждения (б) Анализ рисунка 1.27 показывает, что составляющая тока статора асинхронного двигателя  ту же функцию, что и ток возбуждения в двигателе постоянного тока. Постоянная времени ту же функцию, что и ток возбуждения в двигателе постоянного тока. Постоянная времени  задерживает процесс нарастания потокосцепления задерживает процесс нарастания потокосцепления  также, как постоянная времени также, как постоянная времени  – поток двигателя постоянного тока Ф. Коэффициент электромагнитного момента асинхронного двигателя – поток двигателя постоянного тока Ф. Коэффициент электромагнитного момента асинхронного двигателя  аналогичен коэффициенту электромагнитного момента и ЭДС с двигателем постоянного тока. аналогичен коэффициенту электромагнитного момента и ЭДС с двигателем постоянного тока.Очевидно, анальгины будут структурные схемы асинхронного двигателя пи векторном управлении и двигателя постоянного тока независимого возбуждения для статических режимов их работы. Вариант структурной схемы для расчета статических режимов асинхронного двигателя при векторном управлении приведен на рисунке 1.28, (а), а двигателя постоянного тока независимого возбуждения на рисунке 1.28 (б). 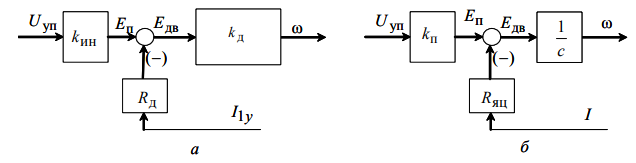 Рисунок 1.28 – Структурные схемы статических режимов АД и ДПТ НВ при векторном управлении Система векторного управления без датчика скорости В тех случая, когда по требованиям технологического процесса диапазон регулирования скорости асинхронного двигателя не должен превышать  , применяются бездатчиковые системы асинхронных электроприводов с векторным управлением. В таких системах информация о текущем значении пространственных положениях векторов потокосцепления и значения скорости вращения асинхронного двигателя определяются косвенно по мгновенным значениям токов и напряжений фаз двигателя на основе математической модели асинхронного двигателя. , применяются бездатчиковые системы асинхронных электроприводов с векторным управлением. В таких системах информация о текущем значении пространственных положениях векторов потокосцепления и значения скорости вращения асинхронного двигателя определяются косвенно по мгновенным значениям токов и напряжений фаз двигателя на основе математической модели асинхронного двигателя. Системы векторного управления асинхронным электроприводом с ориентаций по вектору потокосцепления ротора строится на основе выражения (1.23), представленного во вращающейся системе координат. Функциональная схема с бездатчиковым векторным управлением и ориентацией по вектору потокосцепления ротора приведена на рисунке 1.29 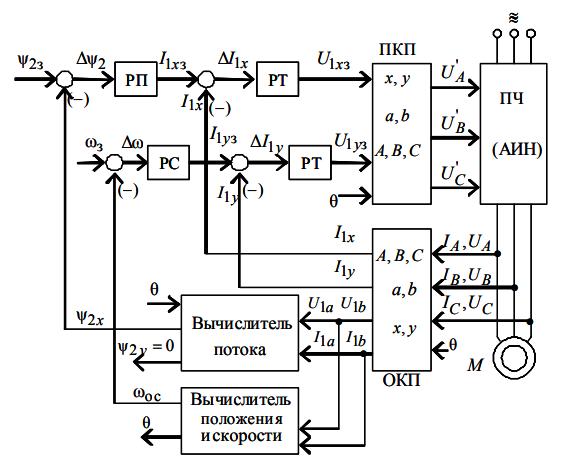 Рисунок 1.29 – Функциональная схема асинхронного электропривода с бездатчиковым векторным управлением с ориентацией по вектору потокосцепления ротора Схема содержит прямой (ПКП) и обратный (ОКП) координатные преобразователи. Преобразователи координат необходимы, так как построение системы управления электроприводом переменного тока возможно только во вращающейся системе координат, а токи и напряжения обмоток асинхронного двигателя – гармонические сигналы неподвижной трехфазной системы координат. Взаимный перевод из одной системы координат в другую выполняют координатные преобразователи. Регулирование параметров электропривода осуществляется по принципу подчиненного регулирования. Система содержит два независимых контура регулирования: контур регулирования потокосцепления ротора  с внутренним подчинённым котором регулирования действительной составляющей тока статора асинхронного двигателя ; с внутренним подчинённым котором регулирования действительной составляющей тока статора асинхронного двигателя ;контур регулирования скорости двигателя с внутренним подчиненным контуром регулирования мнимой составляющей тока статора синхронного двигателя  . .Такое построение системы позволяет осуществлять независимую настройку контуров регулирования. Регуляторами системы управления в соответствии с задающими сигналами скорости и потокосцепления и сигналами обратной связи формируются сигналы управления во вращающейся системе координат. В ПКП управляющие сигналы переводятся в сигналы  , ,  , ,  . . В современных электроприводах переменного тока потокосцепление ротора вычисляется через уравнения динамической модели двигателя с помощью вычислителей потока различного типа. Уравнения для расчета поток ослепления ротора может быть получено из решения системы уравнений, описывающих работу асинхронного двигателя в динамике во вращающейся системе координат  при при  : : , (1.26) , (1.26) , (1.27) , (1.27) , (1.28) , (1.28) , (1.29) , (1.29) , (1.30) , (1.30)где  – коэффициент рассеяния. – коэффициент рассеяния.В бездатчиковых асинхронных электроприводах с векторным управлением информация о скорости вращения электродвигателя рассчитывается вычислителем положения и скорости. Наличие скорости вращения поля статора в уравнениях (1.26, 1.27) позволяет определить скорость вращения двигателя через значение других переменных. При моделировании электроприводов с векторным управлением угол поворота ротика можно определять как во вращающейся, так и в неподвижной системах координат. Однако в реальных электроприводах угол поворота необходимо вычислять только в неподвижной системе координат, так как последовательность преобразования координат обратным координатным преобразователем предполагает, что угол известен. Если предположить, что составляющие потокосцепления ротора  и и  в неподвижной системе координат известны, то можно определить его угол поворота: в неподвижной системе координат известны, то можно определить его угол поворота: . (1.31) . (1.31)Зная угол поворота, можно легко вычислить скорость вращения поля ротора двигателя, взяв производную от угла:  (1.32) (1.32)Производная от  может быть найдена в виде: может быть найдена в виде: , (1.33) , (1.33) (1.34) (1.34)Для регулирования скорости в большом диапазоне необходимо с большой точностью измерять мгновенные значения тока статора и напряжение статора. А для вычисления потокосцепления и скорости  необходимо учитывать температурные изменения параметров схемы замещения. Так, например температурный коэффициент сопротивления меди α = 0,0039 0,0041. При нагреве двигателя от температуры окружающей среды 15 °С до рабочей температуры 75 °С активные сопротивления обмоток статора асинхронного двигателя увеличиваются в 1,234 1,246 раз. Во столько же раз уменьшается точность определения потокосцепления двигателя необходимо учитывать температурные изменения параметров схемы замещения. Так, например температурный коэффициент сопротивления меди α = 0,0039 0,0041. При нагреве двигателя от температуры окружающей среды 15 °С до рабочей температуры 75 °С активные сопротивления обмоток статора асинхронного двигателя увеличиваются в 1,234 1,246 раз. Во столько же раз уменьшается точность определения потокосцепления двигателя  и его скорости . и его скорости .В наиболее совершенных электроприводах с векторным управлением рассчитывают нагрев и охлаждение электродвигателя при его работе. Процесс нагрева двигателя может быть описан уравнением:  , (1.35) , (1.35)где ΔP– мощность потерь энергии в двигателе (количество теплоты, выделяемое в двигателе в единицу времени); A – суммарная теплоотдача двигателя (количество теплоты, отдаваемой двигателем в окружающую среду в единицу времени при разности температур в 1 °С); τ – превышение температуры двигателя над температурой окружающей среды; C – теплоемкость двигателя (количество теплоты, необходимое для повышения температуры двигателя на 1 °С). Из (1.35) следует, что выделившаяся мощность потерь идет на нагрев двигателя и отдачу тепла в окружающую среду. При этом чем больше мощность потерь, тем быстрее происходит нагрев двигателя, из-за того, что двигатель не успевает отдавать тепло в окружающую среду. В разностной форме уравнение нагрева двигателя выглядит следующим образом:  , (1.36) , (1.36)где  – превышение температуры в k-й момент времени; – превышение температуры в k-й момент времени; – превышение температуры в (k-1)-й момент времени; – превышение температуры в (k-1)-й момент времени; – шаг расчета. – шаг расчета.Определенное по (1.36) превышение температуры используется для расчета активных сопротивлений двигателя при изменении температуры. Бездатчиковые системы векторного управления асинхронным двигателем из-за нестабильности параметров схемы замещения уступают системам с прямым векторным управлением. В тех случаях, когда бездатчиковые системы векторного управления не позволяют обеспечить требуемый диапазон регулирования скорости и качество переходных процессов, применяют системы векторного управления с датчиками скорости. |