Индукционные лаги. Морской государственный университет
 Скачать 7.23 Mb. Скачать 7.23 Mb.
|

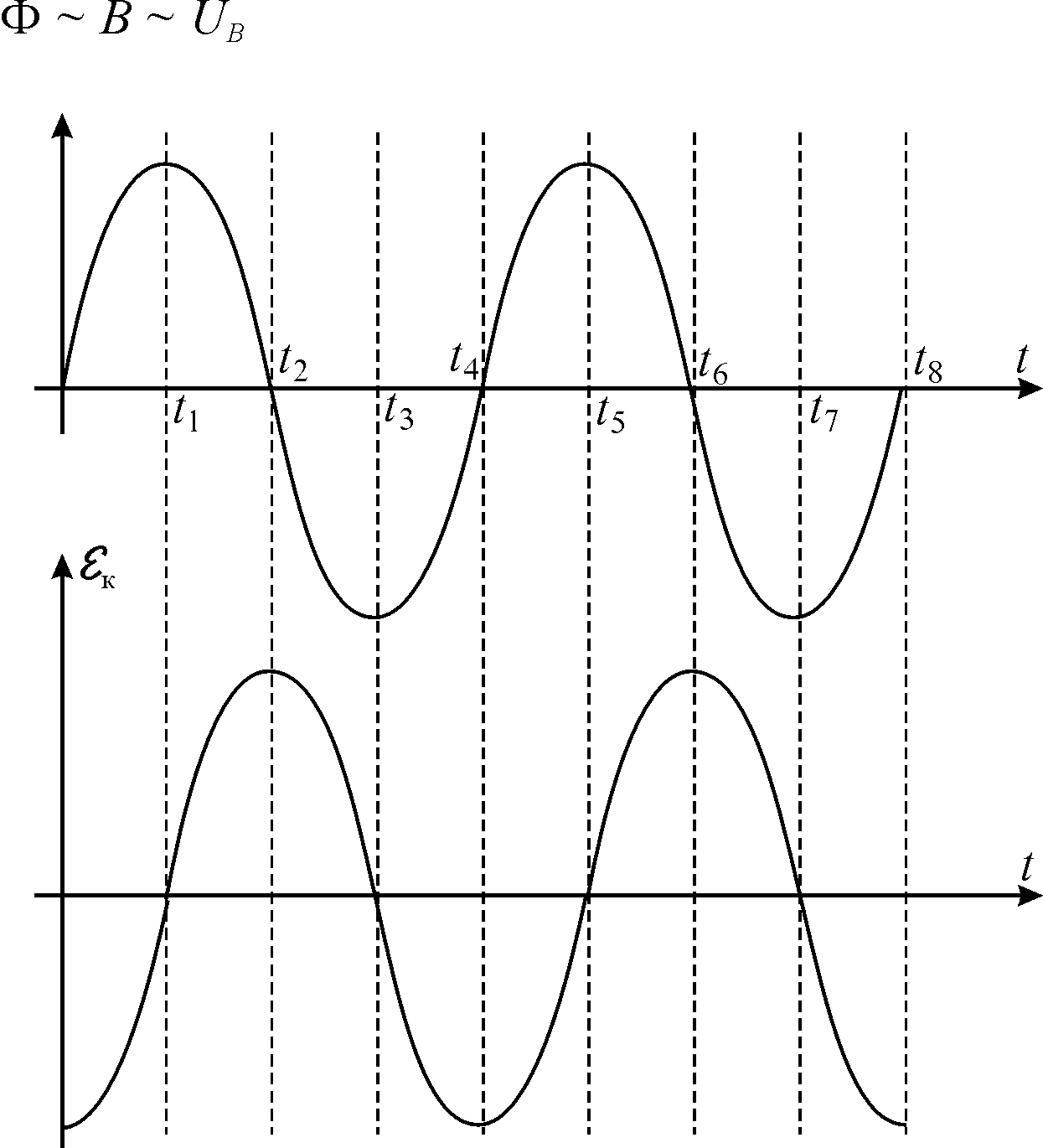
1.2. Квадратурная помехаВернемся к механизму возникновения ЭДС в металлическом проводнике. С увеличением скорости проводника возрастает сила Лоренца, что приводит к повышению плотности электронов, а следовательно, к увеличению электродвижущей силы п. Благодаря свойствам электронов их плотность может возрастать до очень высоких значений, что обеспечивает возможность наблюдать закон Фарадея в большом диапазоне скоростей. В морской воде растворено огромное количество солей, поэтому в ней свободные заряды – это ионы, то есть молекулы, приобретшие или потерявшие один или несколько электронов. При соизмеримости зарядов размеры и массы ионов несоизмеримо больше, чем размеры и массы электронов. Когда судно движется, то под действием силы Лоренца ионы одного знака оказываются на участке S (рис. 1.2) в непосредственной близости друг от друга, то есть их плотность очень быстро становится предельной. Дальнейшее увеличение скорости, а вместе с тем и силы Лоренца не приводит к повышению плотности электрического заряда и к увеличению ЭДС п. Таким образом, закономерность (1.4) уже при очень малых скоростях не выполняется. Такое явление называется явлением поляризации участка проводника. Оно делает невозможным измерение скорости судна, если в ЧЭ используется постоянный магнит. Вторая важная причина, не позволяющая использовать лаг предложенной выше конструкции, – это неограниченность проводника, которым, в принципе, является весь Мировой океан. Возникшие при движении судна положительно и отрицательно заряженные зоны участка S притягивают из окружающей воды ионы противоположного знака. Постоянно происходит компенсация ЭДС, что вносит помеху в измерения. Скорость компенсации зависит от скорости движения молекул, то есть от температуры, плотности, солености воды, от степени ее перемешивания вследствие волнения и движения судна. Влияние этого множества случайных факторов приводит к появлению непредсказуемой помехи, отличить которую от полезного сигнала невозможно. Кроме того, накопление электрических зарядов на электродах резко увеличивает переходное сопротивление контакта "вода – электрод", что также ухудшает работу лага. Для исключения поляризации и сопутствующих ей явлений в индукционном преобразователе применяется переменный магнит. Для его питания используется напряжение Uв промышленной частоты 50 Гц. Вектор магнитной индукции электромагнита 2 изменяется синфазно (то есть, совпадая по фазе) питающему напряжению где Bmax – амплитуда магнитной индукции; – круговая частота питающего напряжения. Тогда для полезного сигнала запишем Теперь возникшая знакопеременная сила Лоренца заставляет ионы двигаться от одного электрода к другому. Причем, чем больше скорость судна, тем выше скорость перемещения ионов, а значит, больше величина п. Измерение скорости судна стало возможным, так как пропорциональность сигнала п и скорости восстановлена. Однако применение переменного электромагнита привело к еще одному нежелательному явлению – к возникновению квадратурной помехи к. Для того чтобы исключить ее из показаний лага, необходимо знать ее характеристики. В массивных проводниках, находящихся под действием переменного магнитного потока, также наводится ЭДС. При этом в толще проводника образуется контур, в котором индуцируются токи, носящие вихревой характер, так называемые токи Фуко. Морские воды представляют собой проводник гигантских размеров. Естественно, что в воде вокруг магнитного потока также образуется контур S (рис. 1.2), в котором возникает ЭДС, что следует из второй части формулировки электромагнитной индукции. Данная ЭДС и является квадратурной помехой к. Эта помеха воспринимается электродами вместе с полезным сигналом. Однако она не зависит от скорости (то есть не содержит в себе информации о скорости судна), поэтому из показаний лага ее нужно исключить. С этой целью рассмотрим характер ее изменения. Р |
 . (1.10)
. (1.10)