Индукционные лаги. Морской государственный университет
 Скачать 7.23 Mb. Скачать 7.23 Mb.
|

|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО МОРСКОГО И РЕЧНОГО ТРАНСПОРТА ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ МОРСКОЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТимени адмирала Г. И. Невельского А. И. Саранчин, В. Ф. Полковников, В В. Завьялов Индукционные электронные лаги Учебное пособие Рекомендовано Дальневосточным отделением учебно-методического объединения по образованию в области эксплуатации водного транспорта (ДВ РОУМО) в качестве учебного пособия для студентов (курсантов) морских специальностей вузов региона Владивосток 2007 УДК 629.5.058.45 Саранчин, А.И., Индукционные электронные лаги: [Текст]: А. И. Саранчин, В. Ф. Полковников, В .В. Завьялов. Учеб. пособие. – Владивосток: 2007. – 48 с. Впервые в специальной литературе для судоводителей дана физическая интерпретация теории индукционного лага, рассмотрены физические механизмы возникновения пропорционального сигнала, квадратурной и других помех. Приводится описание функциональной схемы, правил эксплуатации лага и его калибровки на мерной линии. Рисунки в главах 2-5 выполнены по учебнику Воронова В.В. и др. "Технические средства судовождения. Конструкция и эксплуатация". Предназначено для студентов и курсантов судоводительских факультетов морских вузов. Ил. 20, табл. 4, библиогр. 8 назв. Рецензенты: С. П. Сидорко, канд. техн. наук, профессор, ТОВМИ им. С. О. Макарова. Г. Г. Котов, канд. техн. наук, доцент, Дальрыбвтуз. © А. И. Саранчин. В. Ф. Полковников, В. В. Завьялов ISBN © Морской государственный университет имени адмирала Г. И. Невельского, 2007 ВВЕДЕНИЕИзмеритель скорости, лаг, является важнейшим техническим средством навигации, которым оборудуется морское судно. Несмотря на бурное развитие высокоточных навигационных приборов и систем, в особенности спутниковых, необходимость в измерителях скорости не исчезла, что закреплено многими руководящими документами. Российский Морской регистр судоходства с учетом рекомендаций Международной морской организации (ИМО) предъявляет определенные требования к судовым измерителям скорости. В качестве обязательных параметров лаг должен измерять продольную составляющую скорости перемещения судна на переднем ходу относительно воды или грунта, а также пройденное в этом направлении расстояние. Лаг должен нормально функционировать на всех скоростях переднего хода судна, вплоть до максимальной, и глубинах под килем более 3 м. Погрешность измерения скорости лагом (при условии, что судно свободно от влияния эффектов мелководья, ветра, течения, а также прилива и отлива) не должна превышать 0,2 узла при скорости судна до 10 уз и 2 % при скорости свыше 10 узлов. Конструкция приборов лага должна быть такой, чтобы ни способ их крепления к корпусу судна, ни профилактический осмотр и замена на плаву, ни повреждение любой части донно-забортного оборудования не могли привести к нарушению общей прочности корпуса судна и попаданию воды внутрь его. Информация о скорости может представляться лагом в аналоговой (на шкалах) или цифровой формах либо одновременно в двух видах. При использовании цифрового индикатора шаг показаний не должен превышать 0,1 узла при частоте обновления данных 1 раз в секунду. Аналоговый дисплей должен быть отградуирован, по крайней мере, через каждые 0,5 узла с укрупненной оцифровкой делений не более чем через каждые 5 узлов. Информация о пройденном расстоянии должна отображаться в цифровом виде. Указатель должен охватывать диапазон от 0 до отсчета не менее 9999,9 мили с шагом не более 0,1 мили. Индикация указателей должна быть легко воспринимаемой для снятия отсчетов в дневное и ночное время. Эксплуатационно-технические характеристики лага не должны ухудшаться при бортовой качке судна до 10° и килевой качке до 5°. Всем перечисленным требованиям в полной мере удовлетворяют индукционный электронный лаг ИЭЛ-2М и электромагнитный лаг EML-201. В настоящем пособии обращено особое внимание на физические принципы, используемые при измерении скорости индукционным способом, так как в отечественной учебной литературе для судоводителей эти вопросы освещены неполно. 1. ПРИНЦИП РАБОТЫ ИНДУКЦИОННОГО ЛАГА1.1. Измерение скорости индукционным методомРабота индукционного лага основана на явлении электромагнитной индукции, открытом в 1831 году великим английским физиком М. Фарадеем. Определим это явление в форме, удобной для дальнейших рассуждений. Если проводник находится в изменяющемся магнитном потоке Ф, то в проводнике возникает электродвижущая сила (ЭДС): Изменение магнитного потока и, следовательно, возникновение ЭДС в проводнике происходит: 1) при движении проводника в магнитном поле; 2 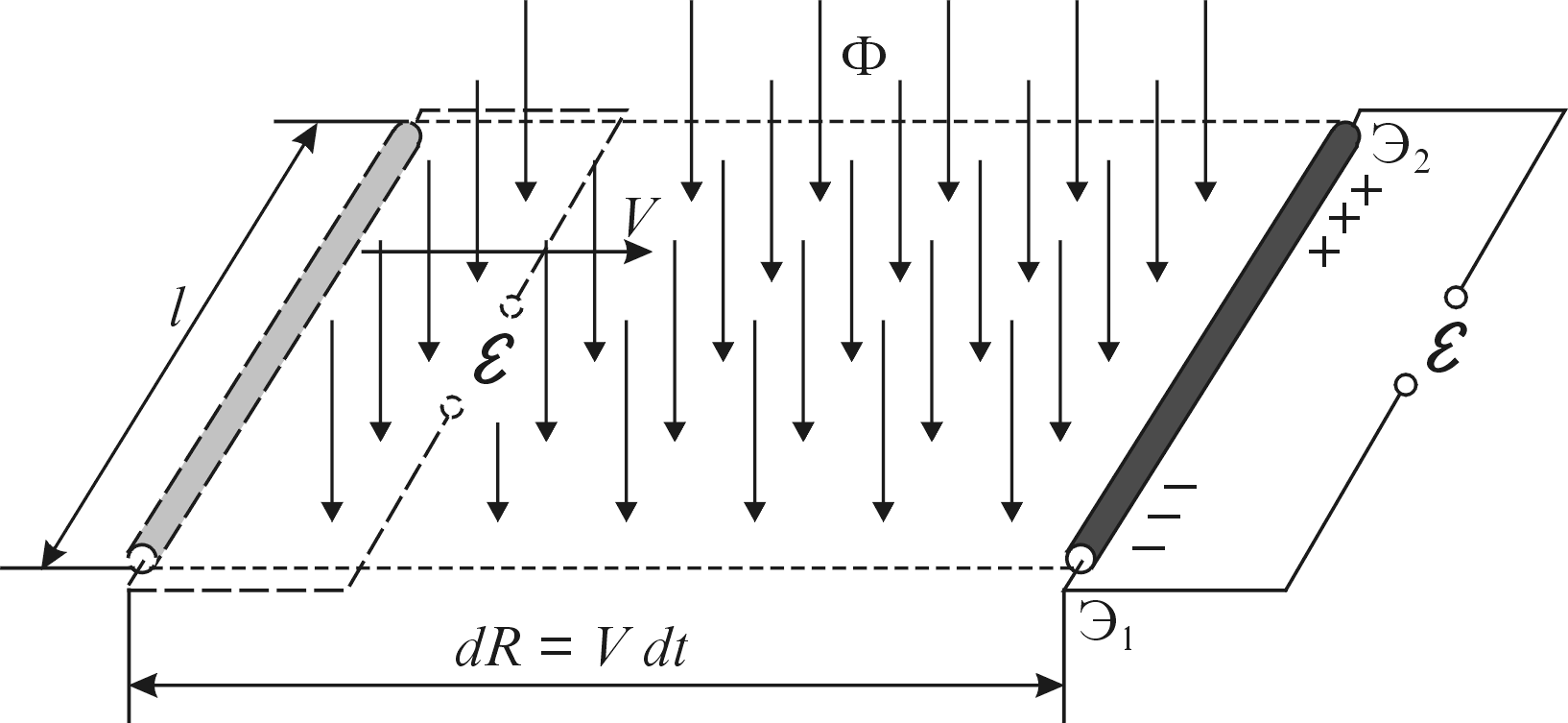 ) при изменении самого магнитного потока, проходящего через поверхность, ограниченную проводящим замкнутым контуром (ЭДС возникает в этом контуре). Рис. 1.1Величина магнитного потока, проходящего через плоскую поверхность площадью S (рис. 1.1), может быть найдена из выражения где B – вектор магнитной индукции. Уравнение справедливо для однородного магнитного поля, причем поверхность S расположена перпендикулярно вектору B. Первая часть определения электромагнитной индукции говорит о том, что ЭДС, наводимая в проводнике, зависит от его движения в магнитном поле (рис. 1.1). Очевидно, что это обстоятельство позволяет измерить скорость движения проводника относительно магнитного потока, изменение которого происходит за счет изменения площади поверхности, описываемой проводником: Следовательно, ЭДС в проводнике будет Этот сигнал называется пропорциональным, или полезным, так как содержит информацию о скорости и прямо пропорционален ей:  . (1.4) . (1.4)Механизм возникновения указанной ЭДС стал понятен после открытия Э. Резерфордом в начале XX века изменения траектории электрически заряженных частиц при их движении в магнитном поле. Х. Лоренц объяснил отклонение таких частиц действием особой силы, названной его именем – силой Лоренца. Сторону этого отклонения можно определить, пользуясь правилом левой руки: если расположить руку так, чтобы вектор магнитной индукции B входил в ладонь, а вытянутые четыре пальца совпали с направлением движения частиц, то отставленный большой палец покажет направление силы Лоренца, куда движется положительный заряд (отрицательный – в противоположную сторону). Известно, что электропроводность материала объясняется наличием в нем свободных электрических зарядов. В металлическом проводнике это электроны. На рис. 1.1 показан отрезок металлической проволоки. При его движении в магнитном поле электроны под действием силы Лоренца перемещаются к концу Э1, который приобретает отрицательный заряд (правило левой руки). На конце Э2 образуется недостаток электронов, и он становится положительно заряженным. Сила взаимодействия между положительно и отрицательно заряженными концами проводника компенсирует силу Лоренца, и перераспределение электронов прекращается. Уравнения (1.3) и (1.4) справедливы как раз для такого равновесного состояния. Измерив напряжение на концах проводника, можно получить скорость его движения. Следует отметить, что данное явление не зависит от выбора системы отсчета, то есть при движении магнитного поля относительно проводника в нем также наводится ЭДС в соответствии с теми же выражениями (1.3) и (1.4), что и используется в индукционных лагах. Для этого в днище судна устанавливается электромагнит, а проводником является морская вода. Чувствительный элемент (ЧЭ) индукционного лага (рис. 1.2) представляет собой изолированный корпус 1, внутри которого помещен электромагнит 2. Корпус установлен в подводной части судна так, что магнитный поток излучается в воду, освещая участок поверхностью S. При движении судна под действием силы Лоренца в соответствии с правилом левой руки положительные ионы перемещаются в пределах участка S, как и в линейном проводнике, в направлении левого борта, а отрицательные – в направлении правого. Для измерения возникшей ЭДС п в корпусе ЧЭ установлены электроды Э1 и Э2 в плоскости, параллельной плоскости шпангоута. Напряжение с электродов поступает в схему лага для обработки. Схема решает зависимость (1.4) и пре образует электрический сигнал в показания скорости судна. Р 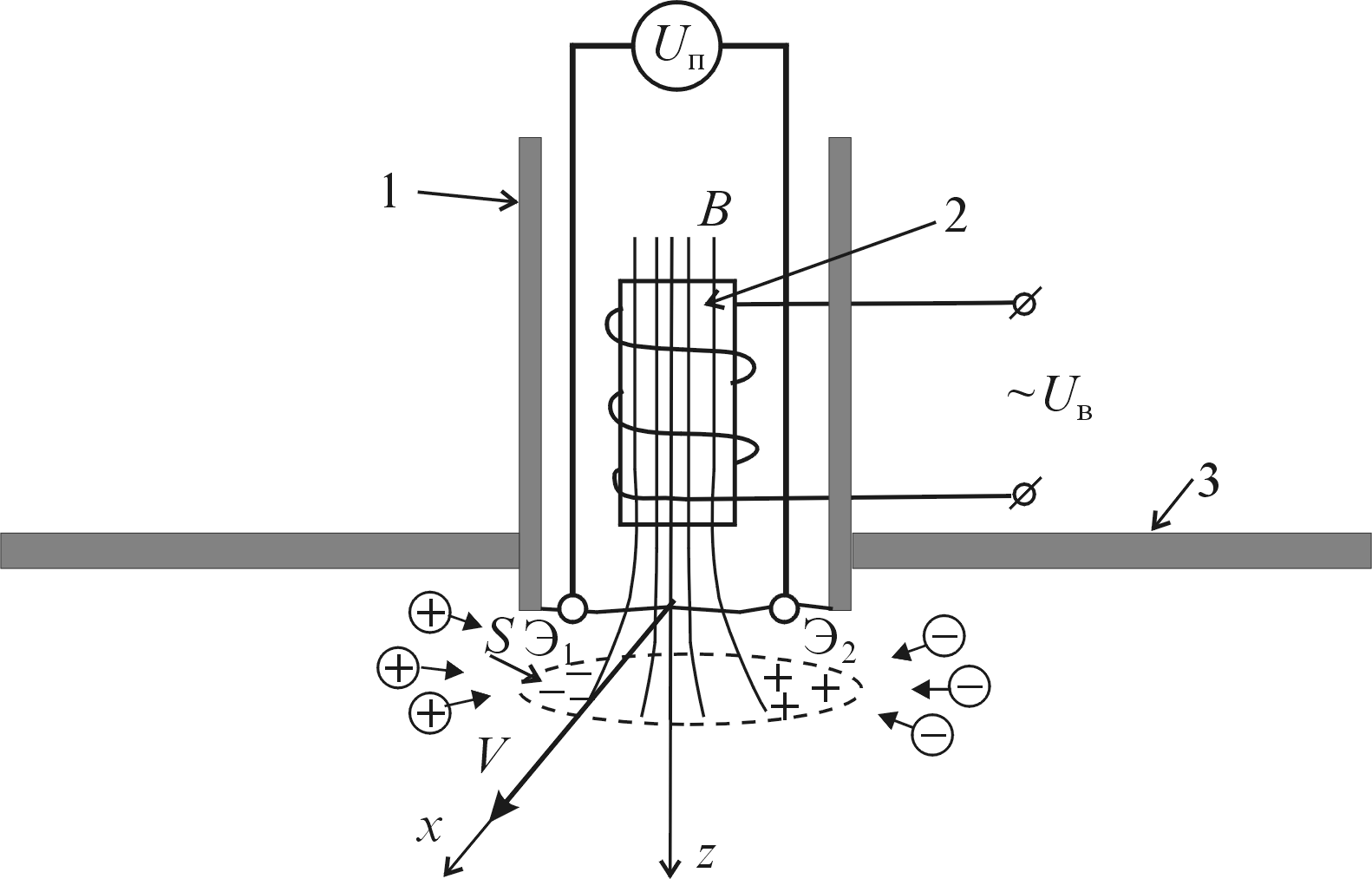 ис. 1.2. 1 – корпус ИППС, 2 – электромагнит, 3 – днище судна Чувствительный элемент лага имеет и собственное название: индукционный первичный преобразователь сигнала (ИППС). Часто в литературе встречается более простое название – индукционный преобразователь (ИП). Казалось бы, задача решена: скорость получена. Однако закон Фарадея в чистом виде наблюдается только в металлическом проводнике. В водной среде на это явление накладываются многие факторы, зависящие от свойств морской воды. Их влияние настолько велико, что измерение скорости без дополнительных мер становится невозможным. Рассмотрим наиболее значительные помехи измерениям и способы их исключения. |