Индукционные лаги. Морской государственный университет
 Скачать 7.23 Mb. Скачать 7.23 Mb.
|

5.2. Методика регулировки лага ИЭЛ-2М на мерной линииПеред выходом на мерную линию необходимо выполнить все проверки и регулировки, изложенные в предыдущей главе. В результате этого исключается постоянная поправка. К мерному полигону предъявляются определенные требования. Длина мерной линии должна быть такой, чтобы обеспечить требуемую точность определения поправок лага. При скоростях до 12 узлов длина пробегов должна быть не менее одной мили, а при более высоких скоростях – не менее двух миль. Глубина в районе должна быть достаточной, чтобы исключить влияние мелководья на точность измерения скорости. Желательно также, чтобы течение в районе не менялось или его изменения были бы незначительными. Волнение моря не должно превышать 3 баллов, так как это сказывается на показаниях лага (см. 4.3). Калибровку лага можно выполнять не только с использованием мерной линии, но и с помощью РЛС или высокоточных обсерваций. Цель калибровки – выявление систематических погрешностей в измерении скорости для их последующей компенсации. При этом одновременно определяются истинная и лаговая скорости на маневрировании судна между двумя пунктами, координаты которых известны с высокой точностью. На рис. 5.4 показано маневрирование судна между двумя секущими створами. Определение поправок лага производится на трех режимах скоростей: "Малый ход", "Средний ход", "Полный ход". Количество пробегов выбирается исходя из характера течения в полигоне. Как правило, на каждом режиме делается три пробега. Это позволяет исключить случайные погрешности. При этом одновременно измеряются истинная Vи и лаговая Vл скорости. В момент пересечения переднего створа наблюдатель на мостике запускает секундомер, а в момент пересечения второго – останавливает его. Таким образом измерено время tи, за которое судно проходит истинное расстояние Sи. Истинные скорости на пробегах рассчитываются по формуле  . (5.2) . (5.2)При осреднении скорости на трех пробегах исключается влияние течения: где V1, V2, V3 – истинные скорости на пробегах. Р 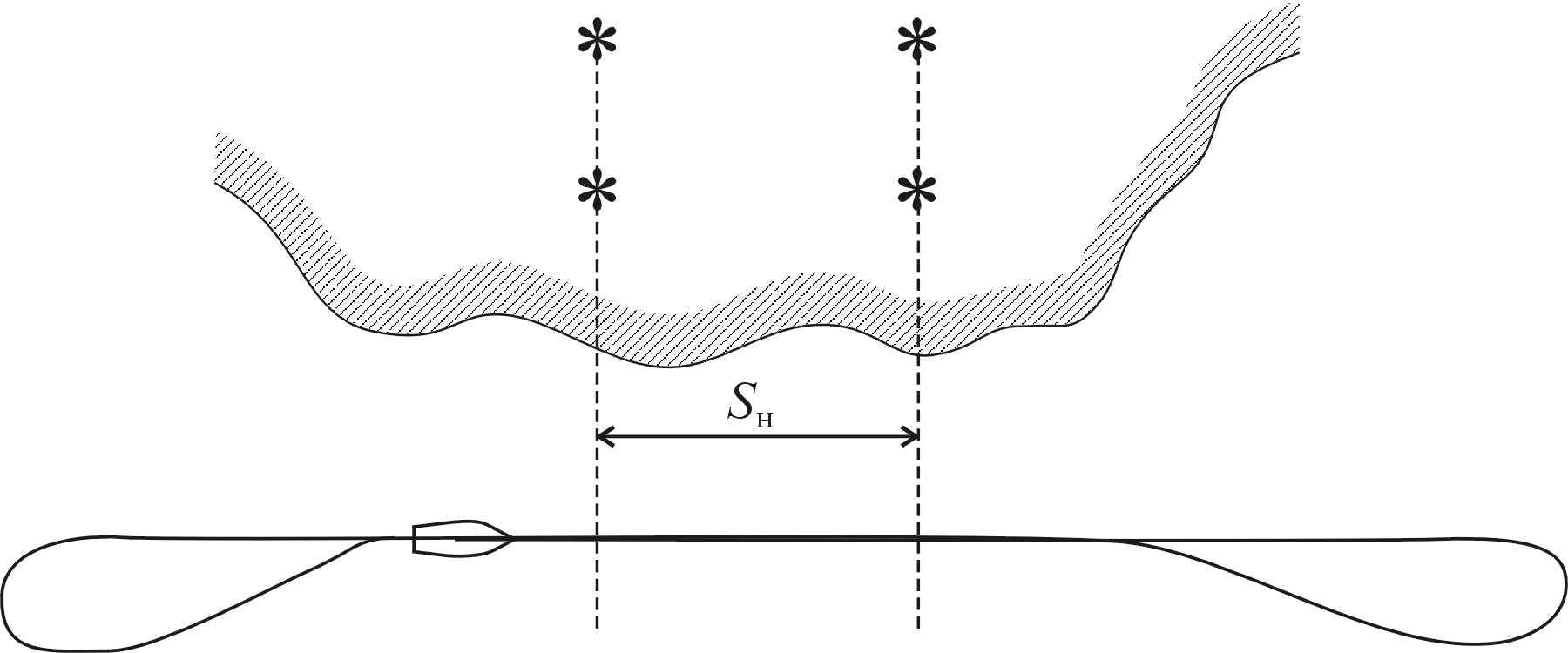 ис. 5.4 Одновременно на каждом пробеге определяется лаговая скорость. После пересечения переднего створа наблюдатель у прибора 6 замечает отсчет Sн по счетчику лага и запускает секундомер, а через 1 или 2 мили в зависимости от длины пробега при отсчете лага Sк останавливает секундомер. Измерено время tл, за которое пройдено расстояние Sк – Sн, после чего рассчитывают скорость по лагу на пробегах Vл и на режиме Vл. ср по формулам:  , (5.4) , (5.4)Расчет поправки на режиме производится по формуле Исходя из того, что вначале устраняется линейная часть погрешности, измерения начинают с режима "Полный ход". После этого по формуле (5.1) рассчитывают новый коэффициент масштаба M2 и, записав его на матовом стекле прибора 6, вводят в схему лага. Затем определяют поправки еще на двух режимах: малого (МХ) и среднего (СХ) ходов. Пусть в результате испытаний лага на мерной линии получены следующие поправки на режимах (рис. 5.5).
П 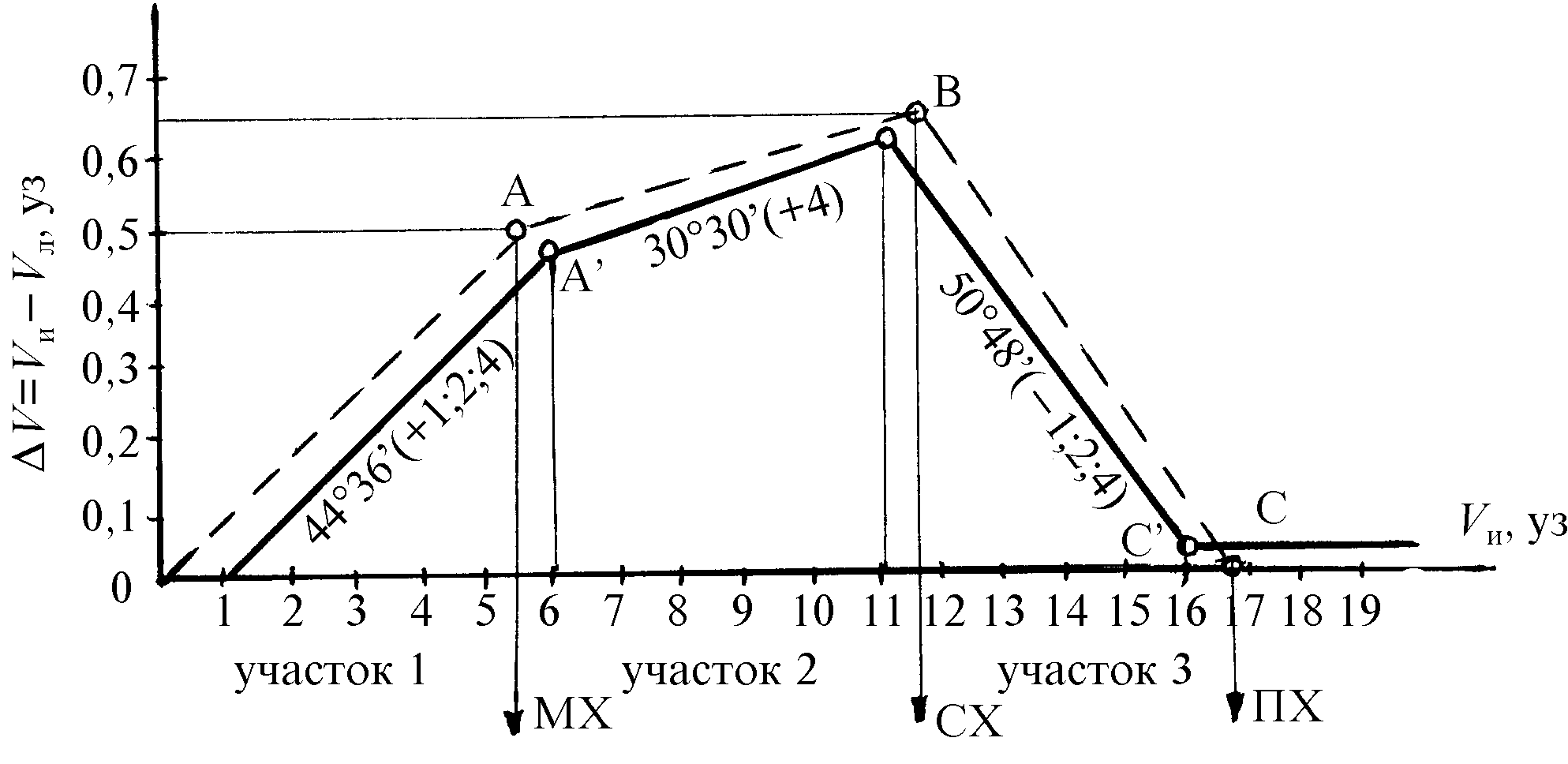 оскольку линейная часть корректуры уже введена с установкой коэффициента M2, то значение Рис. 5.5 Поправки в соответствии со значениями истинной скорости наносятся на график, который строится на миллиметровой бумаге. Значения Vи откладываются по горизонтальной оси в масштабе 1 см – 1 узел, значения Пользуясь трафаретом (рис. 5.6), который имеется в ЗИПе, на графике строят регулировочную ломаную линию, которая наиболее близко повторяет кривую поправок, но при этом удовлетворяет определенным требованиям. Линия должна иметь не более трех участков, каждый из которых начинается и заканчивается в точках, соответствующих целым значениям истинной скорости Vи судна в узлах, поскольку так построена схема корректора. Первая прямая начинается не с нуля, а со значения Vи = 1 узлу, так как электронная схема воспринимает "нуль" как отсутствие информации. Каждый из участков имеет фиксированный наклон, задаваемый трафаретом Кроме того, разность между аппроксимирующими прямыми и прямыми погрешностей не должна превышать 0,1 узла.   Рис. 5.6 Рис. 5.7 Для приведенного примера, наложив трафарет на график (рис. 5.5), определили, что в рассматриваемом случае первому участку соответствует луч трафарета с наклоном + 44°36' и средневзвешенными коэффициентами + (1; 2; 4). Другие лучи не годятся, так как проходят на большом расстоянии от точки А. После того как линия 1-го участка нанесена на миллиметровку, коммутационные перемычки с помощью технологической панели вставляют в гнезда корректора, соответствующие данному участку. Панель (рис. 5.7) представляет собой линейку, на которой отмечены зоны, узлы, участки и коэффициенты. Зона 1 используется, когда полный ход судна составляет менее 17 узлов, а зона 2 – когда полный ход судна более 17 узлов. В приведенном примере перемычка "Зоны" должна стоять в положении 1, перемычка "Узлы" – в положении 1, а четыре перемычки "Коэффициенты" – в гнездах "+", 1, 2, 4 первого участка (нижняя часть панели). Затем проверяют работу корректора на участке 1, подключив тарировочный прибор к гнездам "Имитатор" прибора 6. Переключатель 1 (рис. 4.1) должен быть установлен в положении 5. При включенном корректоре потенциометром тарировочного прибора устанавливают отсчет скорости, соответствующей значению Vл малого хода: Vл = Vи – При отсутствии тарировочного прибора проверку правильности ввода данных в корректор выполняют в режиме работы лага "Ручной ввод". Аналогично определяют установочные данные для остальных участков. В приведенном примере (рис. 5.5) участку 2 соответствует линия трафарета с наклоном 30°30' и весовым коэффициентом +4. Начало участка (А) соответствует целому значению истинной скорости Vи = 6 уз. В корректоре, в разделе "Узлы", устанавливают перемычку в положение 6, во втором участке "Коэффициенты" – в гнездо "+" и в гнездо 4. После этого необходимо проверить правильность установки перемычек участка 2 с помощью тарировочного прибора. При выключенном корректоре устанавливают отсчет скорости Vл = Vи – Начало участка 3 обозначается установкой перемычки в положение 11 в разделе "Узлы". Этому участку соответствует луч трафарета, имеющий наклон 50°48' вниз и отрицательные весовые коэффициенты –(1; 2; 4). В эти положения и устанавливаются перемычки на участке 3. Схема корректора учитывает коэффициенты отрицательными, поэтому в гнезде "+" перемычка отсутствует. Правильность ввода поправки проверяется с помощью имитатора так же, как и в двух предыдущих случаях. Поправка на полном ходу равняется нулю, поэтому показания лага при включенном и выключенном корректоре должны отличаться не более чем на 0,1 узла. При большем отличии необходимо выбрать другой луч трафарета и провести соответствующую установку перемычек. Заканчивается участок 3 16-ю узлами, в это положение и устанавливается последняя перемычка в разделе "Узлы". Отсчет 16 здесь выбран потому, что в положении 17 остаточная погрешность будет больше. На ходу судна более 16 узлов поправка корректором вводиться не будет. На этом составление программы корректора заканчивается. Из рис. 5.5 видно, что регулировочная кривая 1-А'-В'-С', установленная в корректор, не соответствует кривой погрешностей 0-А-В-С. В связи с этим в отсчете скорости наблюдается погрешность. Ее величину для любой скорости можно определить, если из соответствующей точки оси Vи провести вертикальную линию до пересечения с обеими кривыми. Качество регулировки лага определяется на контрольных пробегах. В соответствии с РШС-89 поправка лага должна определяться на мерной линии с точностью до 0,5 % на основных скоростях судна. Из вышесказанного вытекает следующая методика регулировки лага ИЭЛ-2М на мерной линии. 1. Определить истинную Vи и лаговую Vл скорости на полном ходу, рассчитать поправку лага, пользуясь формулами (5.2) – (5.6). 2. Рассчитать новый коэффициент масштаба M2 по формуле (5.1) и выполнить операцию масштабирования, после которой 3. Определить поправки лага на малом и среднем ходах, построить график (рис. 5.5). 4. Определить установочные данные и ввести их в корректор. 5. Выполнить контрольные пробеги и определить остаточные погрешности лага. Контрольные пробеги и расчет остаточных погрешностей выполняются по той же методике, что и основные. Если полученные поправки превышают установленную величину, то следует произвести дополнительную регулировку. Ниже приведены несколько вариантов испытаний лагов ИЭЛ-2М на мерной линии, которые предлагается обработать с целью закрепления материала, изученного в данной главе. В указанных вариантах использована стандартная форма записи информации, получаемой на мерной линии. В первом столбце указывают режим хода, на котором выполнялись пробеги; во втором – истинное расстояние, пройденное судном на данном пробеге; в третьем – расстояние, измеренное лагом на пробеге (разность отсчетов лага); tи – время движения судна между створами; tл – время, прохождения расстояния, измеренного лагом. В последнем столбце записана эталонная скорость (коэффициент масштаба), полученная на предыдущей мерной линии. Вариант 1
Вариант 2
Вариант 3
Вариант 4
6. ЭЛЕКТРОМАГНИТНЫЙ ЛАГ EML-201 Во многих странах мира приборы, работа которых основана на использовании электромагнитной индукции, называются электромагнитными. Отсюда происходит название EML – «электромагнитный лаг». Лаг разработан и выпущен в Японии. 6.1. Состав комплекта и технические характеристики Электромагнитный лаг серии EML-201 включает следующие узлы и приборы (рис 6.1). Обязательное оборудование: – основной прибор LN-201; – усилитель LA-201; – днищевая аппаратура – датчик/кингстон (возможны различные варианты); – индикаторы (репитеры), периферийные приборы. По требованию, исходя из задач, решаемых судном, могут устанавливаться следующие приборы: – аналоговый индикатор (репитер) скорости LR-183; – регулятор яркости (диммер) LD-001А для использования с прибором LN-201; – индикатор (счетчик) расстояния LR-211; – индикатор скорости и расстояния (LR-221); – блок распределения импульсных сигналов ILN011 (LN011). Он принимает контактный импульсный сигнал и передает 4 контактных импульса. Таким образом этот прибор является трансляционным; – монтажный фланец кингстона LV-902 – устанавливается заводом-изготовителем; – защитная цинковая пластина LV-901 – устанавливается заводом-изготовителем. Совершенствование и развитие электромагнитных лагов происходит на основе многолетнего опыта их производства и эксплуатации, а также с использованием широкого круга научно-технических разработок в области новых технологий. Например, в схему лага EML-201 включен микрокомпьютер, что позволило расширить и улучшить технические характеристики лага, в частности:
 На рис. 6.1 представлена упрощенная структурная схема индукционного лага EML-201. Из нее видно, что кроме имеемых в комплекте приборов могут подключаться дополнительные, в зависимости от числа потребителей скорости и пройденного расстояния на данном судне. К диалоговому выходу подключается еще один репитер LR-183. Имеется одна точка подключения любого из двух цифровых репитеров. С увеличением потребителей на судне устанавливается трансляционный прибор ILN011, позволяющий использовать еще четыре цифровых репитера. Основные технические характеристики лага даны в сравнении с лагом ИЭЛ-2М и представлены в табл. 6.1. Таблица 6. 1
Как видно из указанных выше технических характеристик данных лагов, они имеют некоторые не принципиальные отличия. 1. По диапазону скорости: лаг ИЭЛ-2М может измерять более высокую скорость (предельная – до 34 узлов), в то время как EML-201 только до 20 узлов, но при этом может измерять скорость судна при движении назад (до 4 узлов). 2. Диапазон измерения пройденного расстояния у обоих лагов одинаков, но электромагнитный лаг EML-201 обеспечивает большую точность в показаниях измеряемого расстояния – до 0,01 мили, в то время как ИЭЛ-2М – до 0,1 мили 3. По типу ЧЭ индукционный лаг ИЭЛ-2М имеет две разновидности: ИППС, выстреливаемый через клинкет, и ИППС, устанавливаемый заподлицо с корпусом. Лаг EML-201 предлагает только один тип ИППС – заподлицо с корпусом. 4. Лаг ИЭЛ-2М имеет универсальные параметры сети питания по напряжению 110/127/220 В при частоте 50 Гц, что отличает его в выгодную сторону от лага EML-201, напряжение питание которого составляет 100 В при частоте питания 60 Гц. 5. Приборы электромагнитного лага EML-201 имеют меньшие габариты. Их общий вес почти в два раза меньше веса индукционного лага ИЭЛ-2М. Кроме технических характеристик рассматриваемые лаги имеют отличия и по другим параметрам. В силу того, что лаг EML-201 является более современным, у него есть ряд преимуществ перед лагом ИЭЛ-2М. В первую очередь, это улучшенный дизайн и простота эксплуатации. Все индикаторы данного лага (за исключением аналогового) выполнены на жидких кристаллах и выдают полную информацию о параметрах движения судна: относительную скорость, общее расстояние, расстояние, пройденное за рейс. Предусмотрена индикация данных обо всех операциях, производимых на приборе, что существенно облегчает работу обслуживающего персонала. Электромагнитный лаг EML-201 осуществляет автоматическое вычисление и учет корректуры в показаниях скорости и расстояния, обладает обширной памятью, информация в которой сохраняется даже при отсутствии питания. Благодаря этому существенно облегчается процесс калибровки скорости на мерной линии, так как все расчеты производятся им автоматически и результаты сохраняются в памяти до следующих замеров. Также автоматически производится учет влияния на измеренную скорость дрейфа от ветра и течения. В дополнение к вышесказанному система EML-201 предполагает использование датчиков ИППС различных типов для удовлетворения специфических требований при установке на различных судах. В свою очередь, отечественный индукционный лаг ИЭЛ-2М не случайно пользуется популярностью. За многие годы его эксплуатации на судах морского флота он зарекомендовал себя как надежный, довольно простой в обращении и обслуживании, точный, с высокой степенью защищенности прибор. Благодаря этому индукционный лаг ИЭЛ-2М в настоящее время используется на современных отечественных судах. 6.2. Краткие сведения об устройстве приборов лага EML-201 1. Днищевая аппаратура может быть различных видов в зависимости от специфических условий конкретного судна. Во всех случаях в ее состав входят следующие узлы: – сенсорный датчик (ИППС) – вырабатывает напряжение, пропорциональное скорости судна относительно воды (полезный сигнал и сигнал квадратурной помехи) и передает его в усилитель LA 201; – кингстон – предотвращает попадание морской воды внутрь судна, когда датчик извлекается с целью обслуживания или ремонта; – детали крепления кингстона, а также цинковая пластина для протекторной защиты. Датчики (ИППС) могут иметь конструктивные особенности, позволяющие их устанавливать на судах с различным междонным расстоянием. 2. Основной прибор LT 201 предназначен для выработки информации об относительной скорости и пройденного расстояния, а также для управления работой лага в различных режимах. В него поступает сигнал, пропорциональный скорости относительно воды от усилится. Прибор исправляет его, то есть вводит корректуру, ранее определенную на мерной линии. После выполнения этой операции сигнал становится пропорциональным истинной скорости. Параметры для калибровки скорости на мерной линии устанавливаются полуавтоматически через программу на микрокомпьютере. Скорость может также устанавливаться вручную. Переключение режимов работы и подключение различных потребителей осуществляется через дисплей/операционную панель. Основным органом управления лага является дисплей-операционная панель, встроенная в прибор LN-201. Она имеет дисплей скорости и дисплей основного назначения. Дисплей скорости высвечивает скорость судна в положении «RUN» («РАБОТА»). В положении «ADJ» («НАСТРОИКА») он высвечивает параметр или символ, соответствующий каждому выбираемому режиму. Дисплей основного назначения в положении «RUN» высвечивает или общее расстояние, или расстояние, пройденное за рейс. В положении «ADJ» он высвечивает параметры, соответствующие выбранному режиму. На рабочей панели основного прибора находятся органы управления, обеспечивающие переключение режимов, контроль и индикацию рабочих параметров лага. 2. Усилитель LA-201 предназначен для усиления сигнала от ИППС и передачи его в основной прибор. Кроме того, LA-201 решает следующие задачи: – подавление квадратурной помехи; – формирование переменного тока 0,3 А в виде прямоугольных импульсов для возбуждения электромагнита; – обеспечение тестовой проверки лага. Для решения этой задачи в режиме «ТЕСТ» усилитель вырабатывает сигнал, эквивалентный приблизительно 13 узлам. 3. Аналоговый репитер LR-183 предназначен для индикации скорости на круговой шкале. Внешний диаметр его экрана составляет 180 мм. Для согласования шкалы с основным прибором используются синхросигналы. Цена одного оборота шкалы составляет приблизительно 6,7 узла, что дает возможность за 6 оборотов обеспечить полный обзор всего диапазона. Данный репитер имеет электроламповое освещение, для чего используется или встроенный диммер или диммер наружной установки LD 001А. 4. Репитер скорости/расстояния LR-221 предназначен для индикации по выбору или скорости, или пройденного судном расстояния. Этот индикатор получает цифровые сигналы кодом RS 422 от основного прибора и выдает на дисплее в цифровом виде. Выбор скорости или расстояния производится кнопкой «SELECT». Информация о расстоянии сохраняется даже в случае отключения питания. Индикатор имеет жидкокристаллический экран (LCD), который обеспечивает ясное изображение даже при прямом солнечном свете. Свечение экрана LCD может регулироваться. 5. Индикатор расстояния LR-211 предназначен для отображения пройденного судном расстояния за рейс. Он получает цифровые сигналы от основного прибора. Расстояние сбрасывается на ноль нажатием кнопки «RESET» («СБРОС») на 2 секунды или более. 6. Блок распределения импульсных сигналов LN-011 предназначен для трансляции скорости в цифровом виде. Он представляет собой блок распределения импульсных сигналов, имеет четыре контактных выхода и способен транслировать 4 цифровых импульса с передачей управляющего сигнала от основного прибора. 6.3. Особенности обслуживания лага EML-201 В рабочем положении «RUN» лаг имеет два режима: – режим скорости (режим «Е» – подключен дисплей скорости); – режим расстояния (режим «Н» – подключен дисплей общего назначения). Во время плавания, в отличие от отечественного лага ИЭЛ-2М, в данном лаге пройденное расстояние и скорость можно вывести на индикацию только раздельно. В остальном методика навигационного использования системы EML-201 ничем не отличается от методики, принятой для отечественных лагов. В положении «ADJ» лаг имеет 10 режимов: – режим «Е/Н» – ручной ввод скорости; – режим 0 – регулировка нуля; – режим 1 – согласование аналогового индикатора скорости; – режим 2 – ввод значения поправки для общего расстояния; – режимы 3–8 – калибровка лага на мерной линии. Режим «Е/Н» и режим 0 полностью соответствуют подобным режимам лага ИЭЛ-2М. Режимы 1 и 2 не требуют пояснения. Калибровка лага на мерной линии имеет особенности вследствие того, что в схеме имеется встроенный компьютер, позволяющий автоматизировать значительную часть операций и все расчеты. Во время калибровки лага используются следующие режимы: – режим 3 – установка дистанции между створами; – режим 4 – измерения на мерной линии; – режим 5 – вывод измеренных данных на дисплей, их коррекция, утверждение или отмена; – режим 6 – доступ к таблице линеаризации (графику поправок) и коррекция скорости; – режимы 7 и 8 – запасные (для техобслуживания системы). Переход из режима в режим осуществляется кнопками MODE, номера которых соответствуют номеру режима. В режиме 3 устанавливается дистанция между створами в метрах, которая в последующем используется для расчета истинной скорости, после чего необходимо перейти в режим 4. В этом режиме для фиксации моментов прохода секущих створов имеется специальная коробка с набором тумблеров. В момент пересечения переднего секущего створа включается соответствующий тумблер. В конце пробега, когда судно пересекает задний створ, включается следующий тумблер. Как правило, на каждом режиме скорости хода судна делается 2 или 3 пробега. В том случае, когда выполнено 3 пробега, компьютер производит расчет истинной и лаговой скорости по формулам (5.3) и (5.5) соответственно. Очевидно, что наблюдатель у основного прибора для отсчета Sл не нужен. Лаг автоматически использует скорость, которую сам измеряет. В том случае, когда делается 2 пробега, расчет истинной и лаговой скорости производится по соответствующим формулам: После завершения пробегов на данном режиме скоростей оператор переходит в режим 5 калибровки лага. Данные выводятся на дисплей, судоводитель их оценивает. Если он проводил ручные расчеты, то имеет возможность проверить правильность работы компьютера. В случае обнаружения ошибки вносятся исправления. После этого измерения утверждаются. Пробег может быть полностью отменен, если замечена грубая ошибка. После прохождения всех режимов скоростей переходят в режим 6 настройки лага. Компьютер имеет жесткую программу, называемую «линеаризатор». Он строит график поправок лага, подобный рис. 5.5, и выводит его на дисплей. После его утверждения судоводителем поправки вводятся в корректор. Затем вводится раздельно линейная часть корректуры и нелинейная. Причем принцип коррекции такой же, как и в лаге ИЭЛ-2М, только ввод автоматический. В качестве заключения можно сказать, что, несмотря на широкое развитие спутниковой навигации, такие навигационные приборы, как лаг, гирокомпас, магнитный компас, остаются обязательными к установке на морских судах. Новые технологические возможности, применение достижений вычислительной техники открывают широкую возможность для совершенствования этих приборов, повышения их надежности, упрощения способов эксплуатации. СПИСОК ЛИТЕРАТУРЫ1. Воронов В. В., Перфильев В. К., Яловенко А. В. Технические средства судовождения. Конструкция и эксплуатация.– М.: Транспорт, 1988.– 336 с. 2. Воронов В. В., Филипченко В. Г., Яловенко А. В. Индукционный лаг ИЭЛ-2М.– М.: В/О "Мортехинформреклама", 1984.– 40 с. 3. Кораблев А. В., Массаров В. Ф. Электромагнитные навигационные системы и приборы.– Л.: ВМОЛУА, 1976.– 140 с. 4. Саранчин А. И., Петрунин Е. В., Коростелев В. В., Пасешниченко В. Н. Навигационные приборы и системы.– Владивосток: ТОВВМУ, 1987.– 220 с. 5. Смирнов Е. Л., Яловенко А. В., Якушенков А. А. Технические средства судовождения. Теория.– М.: Транспорт, 1988.– 376 с. 6. Физика микромира. Маленькая энциклопедия. / Под общ. ред. Д. В. Ширкова.– М.: Советская энциклопедия, 1980.– 528 с. 7. Яворский Б. М., Детлаф А. А., Милковская Л. Б. Курс физики. Т. 2. Электричество и магнетизм.– М.: Высш. шк., 1966.– 412 с. 8. “Electromagnetic log EML-201”. Manual. Yokogama Denshiki. Co. Yoko, 2000. – 35 c. Оглавление 1. Принцип работы индукционного лага 4 1.1. Измерение скорости индукционным методом 4 1.2. Квадратурная помеха 6 1.3. Погрешности измерения скорости индукционным лагом 9
устройство приборов лага ИЭЛ-2М 12 2.1. Назначение, комплектация, технические характеристики 12 2.2. Конструкция приборов лага 13 3. Блок-схема и функциональная схема лага ИЭЛ-2М 16 3.1. Блок-схема 16 3.2. Функциональная схема 17 4. Обслуживание и навигационное использование лага ИЭЛ-2М 25 4.1. Подготовка к работе и включение лага 25 4.2. Проверка и регулировка лага перед выходом в море 25 4.3. Обслуживание лага ИЭЛ-2М в море. 28 5. Регулировка лага на мерной линии 30 5.1. Характер систематических погрешностей лага ИЭЛ-2М 30 5.2. Методика регулировки лага ИЭЛ-2М на мерной линии 32 6. Электромагнитный лаг EML-201 39 6.1. Состав комплекта и технические характеристики 39 6.2. Краткие сведения об устройстве приборов лага EML-201 42 6.3. Особенности обслуживания лага EML-201 43 Список литературы 45 Позиция № 164 в плане издания учебной литературы МГУ на 2007 г. Александр Иванович Саранчин, Владимир Филиппович Полковников, Виктор Валентинович Завьялов ИНДУКЦИОННЫЕ ЭЛЕКТРОННЫЕ ЛАГИ Учебное пособие Компьютерная верстка и графика – А. И. Саранчин  Отпечатано в типографии ИПК МГУ им. адм. Г. И. Невельского Владивосток, 59, ул. Верхнепортовая, 50а | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||